Potrebbero piacerti anche
- Motorola Master Selection Guide RFDocumento40 pagineMotorola Master Selection Guide RFAbrham Yair Aguilar Rodriguez100% (1)
- Buckling Load Optimization of BeamsDocumento10 pagineBuckling Load Optimization of BeamsAbrham Yair Aguilar RodriguezNessuna valutazione finora
- Catia Aided Radome Analysis Using Geometric Optics MethodDocumento5 pagineCatia Aided Radome Analysis Using Geometric Optics MethodAbrham Yair Aguilar RodriguezNessuna valutazione finora
- Textron Lycoming ManualDocumento70 pagineTextron Lycoming ManualAbrham Yair Aguilar RodriguezNessuna valutazione finora
- Manual de Transistores de Baja Señal MotorolaDocumento43 pagineManual de Transistores de Baja Señal MotorolaAbrham Yair Aguilar RodriguezNessuna valutazione finora
- Motorola Bipolar Power TransistorsDocumento19 pagineMotorola Bipolar Power TransistorsAbrham Yair Aguilar RodriguezNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Winrar Password Remover 2015 Crack Plus Activation KeyDocumento15 pagineWinrar Password Remover 2015 Crack Plus Activation Keysiyamsanker722160% (5)
- FreeFEM DocumentationDocumento746 pagineFreeFEM DocumentationcordobeehNessuna valutazione finora
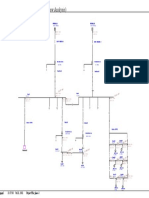
- One-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVDocumento1 paginaOne-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVhaiderNessuna valutazione finora
- Transformer Monitoring Systems - MRDocumento4 pagineTransformer Monitoring Systems - MRKelly chatingNessuna valutazione finora
- ANSI/BICSI 005-2016: Electronic Safety and Security (ESS) System Design and Implementation Best PracticesDocumento28 pagineANSI/BICSI 005-2016: Electronic Safety and Security (ESS) System Design and Implementation Best PracticesJonnas Câmara de AbreuNessuna valutazione finora
- Edited - Grade 9 - Q4 W1 4 TECDocumento14 pagineEdited - Grade 9 - Q4 W1 4 TECNatch LomeeNessuna valutazione finora
- Biological Science 6th Edition Freeman Test BankDocumento21 pagineBiological Science 6th Edition Freeman Test Bankagleamamusable.pwclcq100% (28)
- Term PaperDocumento13 pagineTerm PaperGoutam TulsiyanNessuna valutazione finora
- User Authentication-Passwords, Biometrics and AlternativesDocumento36 pagineUser Authentication-Passwords, Biometrics and AlternativesReza EsnaashariNessuna valutazione finora
- Observed Impact of Internet Café Near The School Vicinity To The Students Academics Performances On VnhsDocumento19 pagineObserved Impact of Internet Café Near The School Vicinity To The Students Academics Performances On VnhsMichelle Renee DaqueNessuna valutazione finora
- Nurshath Dulal Wiki, Age, Photos, Height, Family, Net WorthDocumento1 paginaNurshath Dulal Wiki, Age, Photos, Height, Family, Net Worthraf0707066969Nessuna valutazione finora
- Microsoft Excel TutorialDocumento90 pagineMicrosoft Excel Tutorialteacher.lexleo2782100% (1)
- FIFA 22 Draft Simulator FUTBIN 10Documento1 paginaFIFA 22 Draft Simulator FUTBIN 10Santiago RÍOSNessuna valutazione finora
- Latihan Soal BlankDocumento8 pagineLatihan Soal BlankDanbooNessuna valutazione finora
- MclustDocumento57 pagineMclustfilip_nenadicNessuna valutazione finora
- Tugas 2 - Frame of Thinking - Muhammad IhsanDocumento10 pagineTugas 2 - Frame of Thinking - Muhammad IhsanMuhammad IhsanNessuna valutazione finora
- Chapter 02 SlidesDocumento57 pagineChapter 02 SlidesZahraa AlQallafNessuna valutazione finora
- FTire AnimationDocumento6 pagineFTire Animationhimanshuvermac3053Nessuna valutazione finora
- 1Y Low Voltage Board MaintenanceDocumento2 pagine1Y Low Voltage Board MaintenanceOGBONNAYA MARTINSNessuna valutazione finora
- Optimization: 1 MotivationDocumento20 pagineOptimization: 1 MotivationSCRBDusernmNessuna valutazione finora
- Crush Salary Week3.28-3.30Documento6 pagineCrush Salary Week3.28-3.30Israel Leyson MillareNessuna valutazione finora
- Concept 2 Rowing D1 Users ManualDocumento32 pagineConcept 2 Rowing D1 Users Manualmaestrokui100% (2)
- MR Cain Richard Mann: Curriculum VitaeDocumento4 pagineMR Cain Richard Mann: Curriculum VitaeDoni MuharomNessuna valutazione finora
- Remote Access PolicyDocumento4 pagineRemote Access Policysolobreak05Nessuna valutazione finora
- Reusable Firmware DevelopmentDocumento321 pagineReusable Firmware DevelopmentOsayd Mohamed100% (5)
- World Link Intro Practice Test Units 10Documento5 pagineWorld Link Intro Practice Test Units 10Lumen Christi Mateo BetancesNessuna valutazione finora
- As 2282.8-1999 Methods For Testing Flexible Cellular Polyurethane Determination of Force DeflectionDocumento2 pagineAs 2282.8-1999 Methods For Testing Flexible Cellular Polyurethane Determination of Force DeflectionSAI Global - APACNessuna valutazione finora
- GX1600 1600e SM Usa Exp Eu Em048n90dDocumento46 pagineGX1600 1600e SM Usa Exp Eu Em048n90dJadi PurwonoNessuna valutazione finora
- FAR 23 Loads BrochureDocumento2 pagineFAR 23 Loads BrochureDoor URNessuna valutazione finora
- Latitude 9p0 Datasheet USDocumento2 pagineLatitude 9p0 Datasheet USGuillermo IbarraNessuna valutazione finora