Potrebbero piacerti anche
- BE-DuPont Teflon PrimersDocumento1 paginaBE-DuPont Teflon PrimersborlixNessuna valutazione finora
- AWK Cable Bundle - 6308EN-00Documento2 pagineAWK Cable Bundle - 6308EN-00borlixNessuna valutazione finora
- Gm900 ManualDocumento1 paginaGm900 ManualborlixNessuna valutazione finora
- TLV 1117Documento39 pagineTLV 1117borlixNessuna valutazione finora
- 013149-100 Optioner HP20Documento1 pagina013149-100 Optioner HP20borlixNessuna valutazione finora
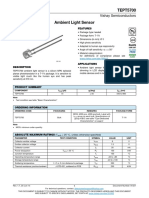
- TEPT5700: Vishay SemiconductorsDocumento5 pagineTEPT5700: Vishay SemiconductorsborlixNessuna valutazione finora
- ABB Compact Flash DSQC656Documento3 pagineABB Compact Flash DSQC656borlixNessuna valutazione finora
- Plasticisers enDocumento1 paginaPlasticisers enborlixNessuna valutazione finora
- Polybd Resin UrethanesDocumento22 paginePolybd Resin UrethanesborlixNessuna valutazione finora
- Easy Guide To Make Hiren's Bootable USB Flash Drive - Learn Basics of Linux OSDocumento8 pagineEasy Guide To Make Hiren's Bootable USB Flash Drive - Learn Basics of Linux OSborlix100% (1)
- Supersoft Flyer en NCIDocumento2 pagineSupersoft Flyer en NCIborlixNessuna valutazione finora
- A System For Footwear Fitting Analysis: Leon Kos and Jože DuhovnikDocumento6 pagineA System For Footwear Fitting Analysis: Leon Kos and Jože DuhovnikborlixNessuna valutazione finora
- Floppy Drive Emulator 2 - Floppy To USB - Floppy Drive To USBDocumento5 pagineFloppy Drive Emulator 2 - Floppy To USB - Floppy Drive To USBborlixNessuna valutazione finora
- Elastoflex W enDocumento2 pagineElastoflex W enborlixNessuna valutazione finora
- Footwearnews 0108Documento6 pagineFootwearnews 0108borlixNessuna valutazione finora
- CosyPUR Flyer Visco en NCIDocumento2 pagineCosyPUR Flyer Visco en NCIborlixNessuna valutazione finora
- Abb Irbt 4003Documento64 pagineAbb Irbt 4003borlixNessuna valutazione finora
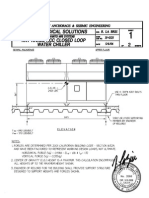
- KKT Kraus KCC 215 Closed Loop Water ChillerDocumento2 pagineKKT Kraus KCC 215 Closed Loop Water ChillerborlixNessuna valutazione finora
- Avalon 90ABDocumento2 pagineAvalon 90ABborlixNessuna valutazione finora
- Awm 8121Documento22 pagineAwm 8121borlixNessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Manual Elisys DuoDocumento322 pagineManual Elisys DuoLeydi Johana Guerra SuazaNessuna valutazione finora
- Loading The Dataset: 'Churn - Modelling - CSV'Documento6 pagineLoading The Dataset: 'Churn - Modelling - CSV'Divyani ChavanNessuna valutazione finora
- BCI ICT ResilienceDocumento57 pagineBCI ICT ResilienceOana DragusinNessuna valutazione finora
- Innovative Charts in Excel: Team Start Point Performance ScoreDocumento6 pagineInnovative Charts in Excel: Team Start Point Performance ScoreVictorNessuna valutazione finora
- Can Internal Excellence Be Measured - DeshpandeDocumento11 pagineCan Internal Excellence Be Measured - DeshpandeFelipeNessuna valutazione finora
- Tommy Molina ResumeDocumento2 pagineTommy Molina Resumeapi-266666163Nessuna valutazione finora
- FAA Safety Briefing Nov-Dec 2017 PDFDocumento36 pagineFAA Safety Briefing Nov-Dec 2017 PDFAllison JacobsonNessuna valutazione finora
- Security Alarm SystemDocumento32 pagineSecurity Alarm SystemAnamika Yadav100% (2)
- Ransomware Ctep Situation Manual Ncep 072022 508 - 0Documento30 pagineRansomware Ctep Situation Manual Ncep 072022 508 - 0piash007_571387617Nessuna valutazione finora
- ADAMS Summary User GuideDocumento58 pagineADAMS Summary User GuideGalliano CantarelliNessuna valutazione finora
- Chain & Sprocket Animation Method - Peterjung 2010Documento31 pagineChain & Sprocket Animation Method - Peterjung 2010peterjung1Nessuna valutazione finora
- ADPRO XO5.3.12 Security GuideDocumento19 pagineADPRO XO5.3.12 Security Guidemichael.f.lamieNessuna valutazione finora
- Huawei AC6805 Wireless Access Controller Datasheet - 2Documento16 pagineHuawei AC6805 Wireless Access Controller Datasheet - 2irfanNessuna valutazione finora
- Notebook Power System Introduction TroubleshootingDocumento44 pagineNotebook Power System Introduction TroubleshootingDhruv Gonawala89% (9)
- 2022 Visual Object Tracking A SurveyDocumento42 pagine2022 Visual Object Tracking A SurveyPaulNessuna valutazione finora
- Annex 4 (Word Format)Documento1 paginaAnnex 4 (Word Format)Amores, ArmandoNessuna valutazione finora
- Devops ResumeDocumento5 pagineDevops ResumeEkant BajajNessuna valutazione finora
- MIS AssignmentDocumento3 pagineMIS Assignmentsparepaper7455Nessuna valutazione finora
- Fastpath Configuration Guide v1.1 PDFDocumento110 pagineFastpath Configuration Guide v1.1 PDFMonowarul Alam MonirNessuna valutazione finora
- SAC Training 01Documento11 pagineSAC Training 01Harshal RathodNessuna valutazione finora
- Mygps: A Diy Project - Portable and Astronomy Gps Based On Arduino NanoDocumento9 pagineMygps: A Diy Project - Portable and Astronomy Gps Based On Arduino NanoadiasmesquitaNessuna valutazione finora
- SVCN CSE AI With IP InternshipDocumento72 pagineSVCN CSE AI With IP Internshipkvpravee28nNessuna valutazione finora
- Threat Analysis ReportDocumento18 pagineThreat Analysis Reporttodo nothingNessuna valutazione finora
- Computer Logic Design Lab 213371Documento24 pagineComputer Logic Design Lab 213371Habib Ur rehmanNessuna valutazione finora
- Brocade Compatibility Matrix Fos 7x MX PDFDocumento34 pagineBrocade Compatibility Matrix Fos 7x MX PDFbalaage2s5Nessuna valutazione finora
- Stanley Omnilock 2013 Price BookDocumento24 pagineStanley Omnilock 2013 Price BookSecurity Lock DistributorsNessuna valutazione finora
- AFF660 Flyer April 2015Documento2 pagineAFF660 Flyer April 2015Iulian BucurNessuna valutazione finora
- Industrial Hygiene Air SamplingDocumento8 pagineIndustrial Hygiene Air SamplingMiguel Gonzalez SaborioNessuna valutazione finora
- Massive MIMO (FDD) (eRAN13.1 - 05)Documento154 pagineMassive MIMO (FDD) (eRAN13.1 - 05)Shashank Prajapati100% (2)
- Pacific General ManualDocumento53 paginePacific General Manualroi_marketingNessuna valutazione finora