Potrebbero piacerti anche
- Industrial Ventilators (Mitshubishi)Documento20 pagineIndustrial Ventilators (Mitshubishi)Kyaw San OoNessuna valutazione finora
- Unscrambler - X Prediction Engine ProgrammerGÇÖs Reference ManualDocumento49 pagineUnscrambler - X Prediction Engine ProgrammerGÇÖs Reference ManualAnonymous bZTdTpLNessuna valutazione finora
- Unscrambler - X Prediction Engine ProgrammerGÇÖs Reference ManualDocumento49 pagineUnscrambler - X Prediction Engine ProgrammerGÇÖs Reference ManualAnonymous bZTdTpLNessuna valutazione finora
- Vlsi Lab Manual (Microwind)Documento40 pagineVlsi Lab Manual (Microwind)anon_1360815100% (7)
- Zarlino-On The ModesDocumento150 pagineZarlino-On The ModesPartituraDireccion100% (1)
- Skills Workshop: For Condensing BoilersDocumento3 pagineSkills Workshop: For Condensing BoilersKailas NimbalkarNessuna valutazione finora
- TDP-502 Water Piping and PumpsDocumento64 pagineTDP-502 Water Piping and PumpsAsyifa AldanaNessuna valutazione finora
- Internet in BMS FinalDocumento33 pagineInternet in BMS FinalRahul SharmaNessuna valutazione finora
- HVAC Control in The New MillenniumDocumento389 pagineHVAC Control in The New Millenniumnicky1213aNessuna valutazione finora
- FEEDCON - Lesson 08 - Closed-Loop Control Systems Part 2Documento36 pagineFEEDCON - Lesson 08 - Closed-Loop Control Systems Part 2Junaid YNessuna valutazione finora
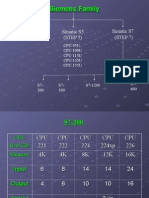
- SiemensDocumento23 pagineSiemensRahul JainNessuna valutazione finora
- BESF DOAS Presentation Final 2019 12Documento42 pagineBESF DOAS Presentation Final 2019 12Malek AqlanNessuna valutazione finora
- Design Control Document-MVACDocumento48 pagineDesign Control Document-MVACRudivic LumainNessuna valutazione finora
- Digital Control of Dynamic Systems - FranklinDocumento770 pagineDigital Control of Dynamic Systems - FranklinKahsay GebrekidanNessuna valutazione finora
- Alpha New Bp12Documento54 pagineAlpha New Bp12AUTO HUBNessuna valutazione finora
- DDC Basics HogerDocumento37 pagineDDC Basics HogerharimadhavNessuna valutazione finora
- Custom Algorithm BlockDocumento392 pagineCustom Algorithm Blocksobhan moshatghiNessuna valutazione finora
- Assistant Professor Dr. Khalaf S Gaeid: Electrical Engineering Department/Tikrit UniversityDocumento39 pagineAssistant Professor Dr. Khalaf S Gaeid: Electrical Engineering Department/Tikrit Universityaditee saxenaaNessuna valutazione finora
- (Chia-Chi Tsui) Robust Control System Design AdvaDocumento308 pagine(Chia-Chi Tsui) Robust Control System Design AdvanizarNessuna valutazione finora
- Hvac Programming Guide - Doc 0Documento181 pagineHvac Programming Guide - Doc 0cameraman01Nessuna valutazione finora
- Decoupling OA and Space Thermal Control: Technical FeatureDocumento4 pagineDecoupling OA and Space Thermal Control: Technical FeatureBhagyashree KadaleNessuna valutazione finora
- NY1395 Smoke-Management GeidelDocumento69 pagineNY1395 Smoke-Management GeidelTrong Hieu NguyenNessuna valutazione finora
- Introduction To Programming & Algorithm Cat 1Documento9 pagineIntroduction To Programming & Algorithm Cat 1cyrus0% (2)
- Disclosure To Promote The Right To InformationDocumento22 pagineDisclosure To Promote The Right To InformationJGD123Nessuna valutazione finora
- Hap Ehelp 022Documento5 pagineHap Ehelp 022Abed NaemNessuna valutazione finora
- SG-540 SG-300 UsersManual SubsetDocumento10 pagineSG-540 SG-300 UsersManual SubsetAnonymous bZTdTpLNessuna valutazione finora
- Tunnel DamperDocumento8 pagineTunnel DamperIvanNessuna valutazione finora
- Ikan Di Kepualauan Indo-AustraliaDocumento480 pagineIkan Di Kepualauan Indo-AustraliaDediNessuna valutazione finora
- AC Os14 2011march01 PDFDocumento134 pagineAC Os14 2011march01 PDFAnonymous bZTdTpL100% (1)
- C1-Basics of Intrumentation & Control EngDocumento137 pagineC1-Basics of Intrumentation & Control EngNicolai CeloNessuna valutazione finora
- RTL DesignDocumento31 pagineRTL DesignBala SubramanianNessuna valutazione finora
- Mec Design Guidev20130513 PDFDocumento18 pagineMec Design Guidev20130513 PDFAmr KamelNessuna valutazione finora
- MEC322 Chapter 1Documento59 pagineMEC322 Chapter 1Muhammad Irfan bin KhalmaizaNessuna valutazione finora
- RTL Design FSM With DatapathDocumento47 pagineRTL Design FSM With DatapathamaanrizaNessuna valutazione finora
- Theory and Applications of HVAC Control Systems A Review of Model Predictive Control MPCDocumento13 pagineTheory and Applications of HVAC Control Systems A Review of Model Predictive Control MPCKhuleedShaikhNessuna valutazione finora
- SDH TechnologyDocumento26 pagineSDH TechnologyJayesh SinghalNessuna valutazione finora
- Mumma Eng Sys DOAS Desiccants Aug 07Documento8 pagineMumma Eng Sys DOAS Desiccants Aug 07oooZNessuna valutazione finora
- 5 Building Systems Example 2 Dubai Sept 2014 SlidesDocumento87 pagine5 Building Systems Example 2 Dubai Sept 2014 SlidescliveNessuna valutazione finora
- Single Duct UnitsDocumento30 pagineSingle Duct UnitsMike AristaNessuna valutazione finora
- Heating Ventilation and Air ConditioningDocumento38 pagineHeating Ventilation and Air ConditioningpraisethenordNessuna valutazione finora
- (Resources For Measurement and Control Series) Hughes, Thomas A - Programmable Controllers, Fourth Edition-IsA (2005)Documento384 pagine(Resources For Measurement and Control Series) Hughes, Thomas A - Programmable Controllers, Fourth Edition-IsA (2005)Abeng YogtaNessuna valutazione finora
- How To Import Data From Template Projects: QB Tip 001Documento3 pagineHow To Import Data From Template Projects: QB Tip 001maheshNessuna valutazione finora
- WPS Office 2016Documento22 pagineWPS Office 2016Muhammad Aliff SyukriNessuna valutazione finora
- Systems Programming: Designing and Developing Distributed ApplicationsDa EverandSystems Programming: Designing and Developing Distributed ApplicationsNessuna valutazione finora
- Low Heating Costs: QB Tip 001Documento8 pagineLow Heating Costs: QB Tip 001maheshNessuna valutazione finora
- Robust Industrial Control Systems: Optimal Design Approach for Polynomial SystemsDa EverandRobust Industrial Control Systems: Optimal Design Approach for Polynomial SystemsNessuna valutazione finora
- DD Vahid ch4Documento89 pagineDD Vahid ch4Bobby HalNessuna valutazione finora
- Vahid - Digital Design - ch06Documento91 pagineVahid - Digital Design - ch06Elder SantosNessuna valutazione finora
- Fog Machine User Manual PDFDocumento9 pagineFog Machine User Manual PDFKumarNessuna valutazione finora
- Cleaver Brooks - Manual de Elementos en OperaciónDocumento94 pagineCleaver Brooks - Manual de Elementos en Operaciónkristian yarascaNessuna valutazione finora
- L-02 (SM) (IA&C) ( (EE) NPTEL) - Architecture of Industrial Automation SystemsDocumento21 pagineL-02 (SM) (IA&C) ( (EE) NPTEL) - Architecture of Industrial Automation SystemsRaymond EsmeraldaNessuna valutazione finora
- C ProgrammingDocumento54 pagineC ProgrammingNitin KhannaNessuna valutazione finora
- Control Systems KuestionDocumento39 pagineControl Systems KuestionRose KayoNessuna valutazione finora
- Chilled Water System Sequence of OperationDocumento3 pagineChilled Water System Sequence of OperationdimasNessuna valutazione finora
- Evergreen Chiller Performance Outputs: Tag Name: 23XRV 350TRDocumento1 paginaEvergreen Chiller Performance Outputs: Tag Name: 23XRV 350TRcalvin.bloodaxe4478Nessuna valutazione finora
- Primary Cooling Coil For Air Handling UnitDocumento23 paginePrimary Cooling Coil For Air Handling UnitLeo GohNessuna valutazione finora
- Deep Reinforcement Learning For HVAC Control in Smart BuildingsDocumento6 pagineDeep Reinforcement Learning For HVAC Control in Smart BuildingsLakshyaGhulianiNessuna valutazione finora
- BMS - Honeywell - R1Documento3 pagineBMS - Honeywell - R1samehNessuna valutazione finora
- ALA 1 Chapter 9 - Fluid DynamicsDocumento9 pagineALA 1 Chapter 9 - Fluid Dynamicsphoenix eastwoodNessuna valutazione finora
- Connecting Arduino To Thingspeak Using Python As An Middle WareDocumento14 pagineConnecting Arduino To Thingspeak Using Python As An Middle WareManoj RamNessuna valutazione finora
- Siemens Simatic st70n Catalogue 2014-Eng PDFDocumento276 pagineSiemens Simatic st70n Catalogue 2014-Eng PDFsalvadorNessuna valutazione finora
- Digital Design: Chapter 1: IntroductionDocumento25 pagineDigital Design: Chapter 1: IntroductionElder SantosNessuna valutazione finora
- Digital Logic and Programming in C PDFDocumento12 pagineDigital Logic and Programming in C PDFRizwan Ahmed67% (3)
- Installation and commissioning centrifugal pumpsDocumento3 pagineInstallation and commissioning centrifugal pumpsKu KemaNessuna valutazione finora
- Greenhouse Ventilation and CoolingDocumento8 pagineGreenhouse Ventilation and Coolinglakshminarayanan100% (1)
- List of Computer Networking DevicesDocumento1 paginaList of Computer Networking Deviceskamit17102900100% (1)
- Distributed Computer Control Systems 1981: Proceedings of the Third IFAC Workshop, Beijing, China, 15-17 August 1981Da EverandDistributed Computer Control Systems 1981: Proceedings of the Third IFAC Workshop, Beijing, China, 15-17 August 1981Nessuna valutazione finora
- DD Vahid 5Documento94 pagineDD Vahid 5Anonymous hWj4HKIDOFNessuna valutazione finora
- Digital Design Gta Esg: - Sequential CircuitDocumento34 pagineDigital Design Gta Esg: - Sequential CircuitCeyhan İleriNessuna valutazione finora
- Syllabus: Economics 805, Part 1 Evolution and Learning in GamesDocumento3 pagineSyllabus: Economics 805, Part 1 Evolution and Learning in GamesAnonymous bZTdTpLNessuna valutazione finora
- MATH 133 - Intensive Calculus For The Physical and Life Sciences 1Documento4 pagineMATH 133 - Intensive Calculus For The Physical and Life Sciences 1Anonymous bZTdTpLNessuna valutazione finora
- IDS 3333 Syllabus Spring 2014 FSDDocumento12 pagineIDS 3333 Syllabus Spring 2014 FSDAnonymous bZTdTpLNessuna valutazione finora
- Syllabus For AAA 109Documento7 pagineSyllabus For AAA 109Anonymous bZTdTpLNessuna valutazione finora
- IS 335: Information Technology in BusinessDocumento5 pagineIS 335: Information Technology in BusinessAnonymous bZTdTpLNessuna valutazione finora
- DS1232Documento7 pagineDS1232Ajith VargheseNessuna valutazione finora
- Supreme Court of The United States: Hiibel V. Sixth Judicial District Court of Nevada, Humboldt CountyDocumento25 pagineSupreme Court of The United States: Hiibel V. Sixth Judicial District Court of Nevada, Humboldt CountyAnonymous bZTdTpLNessuna valutazione finora
- Ph434 W11Documento2 paginePh434 W11Anonymous bZTdTpLNessuna valutazione finora
- Aaa Int SG Sept18 Jun19Documento22 pagineAaa Int SG Sept18 Jun19Muhammad ImranNessuna valutazione finora
- Family Educational Rights and Privacy Act Regulations: SectionDocumento28 pagineFamily Educational Rights and Privacy Act Regulations: SectionAnonymous bZTdTpLNessuna valutazione finora
- Machine Pan ComboDocumento1 paginaMachine Pan ComboAnonymous bZTdTpLNessuna valutazione finora
- EvereadyDocumento1 paginaEvereadyAnonymous bZTdTpLNessuna valutazione finora
- En CD00002383Documento15 pagineEn CD00002383Anonymous bZTdTpLNessuna valutazione finora
- User ManualDocumento17 pagineUser ManualAnonymous bZTdTpLNessuna valutazione finora
- COM 111 Public Speaking SyllabusDocumento9 pagineCOM 111 Public Speaking SyllabusAnonymous bZTdTpLNessuna valutazione finora
- Intl 434Documento12 pagineIntl 434Anonymous bZTdTpLNessuna valutazione finora
- PHRA 1243 Syllabus Pharm Tech CertificationDocumento3 paginePHRA 1243 Syllabus Pharm Tech CertificationAnonymous bZTdTpLNessuna valutazione finora
- Intl 434Documento12 pagineIntl 434Anonymous bZTdTpLNessuna valutazione finora
- Abc PDFDocumento14 pagineAbc PDFAkshay PNessuna valutazione finora
- Field Practicum Syllabus SWK 435-445.doc Revised 8/2015Documento4 pagineField Practicum Syllabus SWK 435-445.doc Revised 8/2015Anonymous bZTdTpLNessuna valutazione finora
- Engl 2323 Master Syl 12Documento7 pagineEngl 2323 Master Syl 12Anonymous bZTdTpLNessuna valutazione finora
- English 2323 Fall SyllabusDocumento12 pagineEnglish 2323 Fall SyllabusAnonymous bZTdTpLNessuna valutazione finora
- ARSTLIBR554 Fall2016Documento5 pagineARSTLIBR554 Fall2016Anonymous bZTdTpLNessuna valutazione finora
- SP16 Comm 3333 Syllabus HoltDocumento11 pagineSP16 Comm 3333 Syllabus HoltAnonymous bZTdTpLNessuna valutazione finora
- Syllabus For Mathematics 554/703I, Section 501, Fall 2012Documento1 paginaSyllabus For Mathematics 554/703I, Section 501, Fall 2012Anonymous bZTdTpLNessuna valutazione finora
- Course Syllabus Biology 155 General Biology I: FALL 2015Documento9 pagineCourse Syllabus Biology 155 General Biology I: FALL 2015Anonymous bZTdTpLNessuna valutazione finora
- Pipeline Corrosion Assessment MethodsDocumento21 paginePipeline Corrosion Assessment MethodsGilletNessuna valutazione finora
- Scoop Atlas Wagner ST1810Documento4 pagineScoop Atlas Wagner ST1810Juan Manuel PerezNessuna valutazione finora
- Database Classification TypesDocumento10 pagineDatabase Classification TypesBhiea Mische MatilacNessuna valutazione finora
- Digital Logic Design - Switch Logic & Basic GatesDocumento27 pagineDigital Logic Design - Switch Logic & Basic GatesTroon SoonNessuna valutazione finora
- Indian Standards List As On Jan2009Documento216 pagineIndian Standards List As On Jan2009Vasudeva Pavan VemuriNessuna valutazione finora
- Hydrogen and Its Compound.1Documento10 pagineHydrogen and Its Compound.1abhishekNessuna valutazione finora
- ASP Flashcards - QuizletDocumento36 pagineASP Flashcards - QuizletRehman MuzaffarNessuna valutazione finora
- h6541 Drive Sparing Symmetrix Vmax WPDocumento19 pagineh6541 Drive Sparing Symmetrix Vmax WPsantoshNessuna valutazione finora
- MTech Information Security FINAL 10052018Documento20 pagineMTech Information Security FINAL 10052018sirisha vNessuna valutazione finora
- Wsat200 RamsaDocumento12 pagineWsat200 RamsaAndy ColeNessuna valutazione finora
- DbintfcDocumento80 pagineDbintfchnr.uninstallNessuna valutazione finora
- TIM Fungsi 1Documento40 pagineTIM Fungsi 1lilikNessuna valutazione finora
- Network Layer: Computer Networking: A Top Down ApproachDocumento83 pagineNetwork Layer: Computer Networking: A Top Down ApproachMuhammad Bin ShehzadNessuna valutazione finora
- Introduction - Week 2Documento37 pagineIntroduction - Week 2Tayyab AhmedNessuna valutazione finora
- ISCOM HT803 DatasheetDocumento2 pagineISCOM HT803 Datasheetnmc79Nessuna valutazione finora
- VSD Operacion ControlDocumento138 pagineVSD Operacion ControlLeon PerezNessuna valutazione finora
- NewsDocumento26 pagineNewsMaria Jose Soliz OportoNessuna valutazione finora
- Syllabi M.Tech. WRDMDocumento114 pagineSyllabi M.Tech. WRDMMadhab KoiralaNessuna valutazione finora
- Linear Thermal Expansion of Solid Materials With A Vitreous Silica DilatometerDocumento7 pagineLinear Thermal Expansion of Solid Materials With A Vitreous Silica Dilatometerluis_may22Nessuna valutazione finora
- Jaguar Land Rover Configuration Lifecycle Management WebDocumento4 pagineJaguar Land Rover Configuration Lifecycle Management WebStar Nair Rock0% (1)
- Sec 2 French ImmersionDocumento1 paginaSec 2 French Immersionapi-506328259Nessuna valutazione finora
- 3BSE079234 - en 800xa 6.0 ReleasedDocumento7 pagine3BSE079234 - en 800xa 6.0 ReleasedFormat_CNessuna valutazione finora
- Superconductivity in RH S and PD Se: A Comparative StudyDocumento5 pagineSuperconductivity in RH S and PD Se: A Comparative StudyChithra ArulmozhiNessuna valutazione finora