Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- How To Create A Powerful Brand Identity (A Step-by-Step Guide) PDFDocumento35 pagineHow To Create A Powerful Brand Identity (A Step-by-Step Guide) PDFCaroline NobreNessuna valutazione finora
- Linux For Beginners - Shane BlackDocumento165 pagineLinux For Beginners - Shane BlackQuod Antichristus100% (1)
- Information Security Chapter 1Documento44 pagineInformation Security Chapter 1bscitsemvNessuna valutazione finora
- Food and Beverage Department Job DescriptionDocumento21 pagineFood and Beverage Department Job DescriptionShergie Rivera71% (7)
- Lending OperationsDocumento54 pagineLending OperationsFaraz Ahmed FarooqiNessuna valutazione finora
- Install ChemcadDocumento1 paginaInstall ChemcadIir MnemonisNessuna valutazione finora
- Condenser CalculationDocumento42 pagineCondenser CalculationIir Mnemonis0% (1)
- POST TEST 3 and POST 4, in ModuleDocumento12 paginePOST TEST 3 and POST 4, in ModuleReggie Alis100% (1)
- Learning GoalsDocumento15 pagineLearning GoalsIir Mnemonis0% (7)
- Bukti ErrorDocumento1 paginaBukti ErrorIir MnemonisNessuna valutazione finora
- Bukti ErrorDocumento1 paginaBukti ErrorIir MnemonisNessuna valutazione finora
- Aplikasi CNT (Carbon Nanotube) Dari Sampah Plastik Pada PEMFC (Polymer Electrolite Membrane Fuel Cell)Documento2 pagineAplikasi CNT (Carbon Nanotube) Dari Sampah Plastik Pada PEMFC (Polymer Electrolite Membrane Fuel Cell)Iir MnemonisNessuna valutazione finora
- Tugas Matematika Teknik Kimia II: Ahmad Irawan 122013001Documento7 pagineTugas Matematika Teknik Kimia II: Ahmad Irawan 122013001Iir MnemonisNessuna valutazione finora
- IsotermDocumento2 pagineIsotermIir MnemonisNessuna valutazione finora
- Metode NevilleDocumento3 pagineMetode NevilleIir MnemonisNessuna valutazione finora
- Print SKDocumento1 paginaPrint SKIir MnemonisNessuna valutazione finora
- Tugas I (Kelas A Teknik Kimia)Documento7 pagineTugas I (Kelas A Teknik Kimia)Iir MnemonisNessuna valutazione finora
- (Report Title) : Owner (Course Title) (Teacher's Name)Documento3 pagine(Report Title) : Owner (Course Title) (Teacher's Name)Iir MnemonisNessuna valutazione finora
- Qty Service in Order Price: Jl. RW Monginsidi Lr. Ramayana No. 92 Rt. 09/002 Kec. Kalidoni Kel. Kalidoni Palembang 30118Documento2 pagineQty Service in Order Price: Jl. RW Monginsidi Lr. Ramayana No. 92 Rt. 09/002 Kec. Kalidoni Kel. Kalidoni Palembang 30118Iir MnemonisNessuna valutazione finora
- Custom Web Development and Design AgreementDocumento6 pagineCustom Web Development and Design AgreementIir MnemonisNessuna valutazione finora
- Innovations in Land AdministrationDocumento66 pagineInnovations in Land AdministrationSanjawe KbNessuna valutazione finora
- RevisionHistory APFIFF33 To V219Documento12 pagineRevisionHistory APFIFF33 To V219younesNessuna valutazione finora
- Unit 1Documento3 pagineUnit 1beharenbNessuna valutazione finora
- Internship ReportDocumento46 pagineInternship ReportBilal Ahmad100% (1)
- Are Groups and Teams The Same Thing? An Evaluation From The Point of Organizational PerformanceDocumento6 pagineAre Groups and Teams The Same Thing? An Evaluation From The Point of Organizational PerformanceNely Noer SofwatiNessuna valutazione finora
- Environmental Auditing For Building Construction: Energy and Air Pollution Indices For Building MaterialsDocumento8 pagineEnvironmental Auditing For Building Construction: Energy and Air Pollution Indices For Building MaterialsAhmad Zubair Hj YahayaNessuna valutazione finora
- Edita's Opertionalization StrategyDocumento13 pagineEdita's Opertionalization StrategyMaryNessuna valutazione finora
- TSB 120Documento7 pagineTSB 120patelpiyushbNessuna valutazione finora
- Privacy: Based On Slides Prepared by Cyndi Chie, Sarah Frye and Sharon Gray. Fifth Edition Updated by Timothy HenryDocumento50 paginePrivacy: Based On Slides Prepared by Cyndi Chie, Sarah Frye and Sharon Gray. Fifth Edition Updated by Timothy HenryAbid KhanNessuna valutazione finora
- Extent of The Use of Instructional Materials in The Effective Teaching and Learning of Home Home EconomicsDocumento47 pagineExtent of The Use of Instructional Materials in The Effective Teaching and Learning of Home Home Economicschukwu solomon75% (4)
- CH 1 India Economy On The Eve of Independence QueDocumento4 pagineCH 1 India Economy On The Eve of Independence QueDhruv SinghalNessuna valutazione finora
- Ibbotson Sbbi: Stocks, Bonds, Bills, and Inflation 1926-2019Documento2 pagineIbbotson Sbbi: Stocks, Bonds, Bills, and Inflation 1926-2019Bastián EnrichNessuna valutazione finora
- Engineering Management (Final Exam)Documento2 pagineEngineering Management (Final Exam)Efryl Ann de GuzmanNessuna valutazione finora
- Unit-5 Shell ProgrammingDocumento11 pagineUnit-5 Shell ProgrammingLinda BrownNessuna valutazione finora
- Doterra Enrollment Kits 2016 NewDocumento3 pagineDoterra Enrollment Kits 2016 Newapi-261515449Nessuna valutazione finora
- Building and Other Construction Workers Act 1996Documento151 pagineBuilding and Other Construction Workers Act 1996Rajesh KodavatiNessuna valutazione finora
- Web Technology PDFDocumento3 pagineWeb Technology PDFRahul Sachdeva100% (1)
- Phase 1: API Lifecycle (2 Days)Documento3 paginePhase 1: API Lifecycle (2 Days)DevendraNessuna valutazione finora
- 90FF1DC58987 PDFDocumento9 pagine90FF1DC58987 PDFfanta tasfayeNessuna valutazione finora
- HRO (TOOLS 6-9) : Tool 6: My Family and My Career ChoicesDocumento6 pagineHRO (TOOLS 6-9) : Tool 6: My Family and My Career ChoicesAkosi EtutsNessuna valutazione finora
- JAZEL Resume-2-1-2-1-3-1Documento2 pagineJAZEL Resume-2-1-2-1-3-1GirlieJoyGayoNessuna valutazione finora
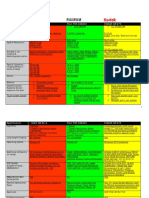
- Agfa CR 85-X: Specification Fuji FCR Xg5000 Kodak CR 975Documento3 pagineAgfa CR 85-X: Specification Fuji FCR Xg5000 Kodak CR 975Youness Ben TibariNessuna valutazione finora
- How To Control A DC Motor With An ArduinoDocumento7 pagineHow To Control A DC Motor With An Arduinothatchaphan norkhamNessuna valutazione finora
- CoDocumento80 pagineCogdayanand4uNessuna valutazione finora