For more information, please visit the product page.
date
11/19/2014
page
1 of 10
SERIES: AMT20 DESCRIPTION: MODULAR ABSOLUTE ENCODER
FEATURES
patented capacitive ASIC technology
low power consumption
SPI configurable settings
digitally set zero position alignment
12-bit absolute position via SPI (4096 positions)
incremental resolutions up to 1024 PPR
index pulse
compact modular package with locking hub for ease of installation
7 different mounting hole options
-40~125C operating temperature
ELECTRICAL
parameter
conditions/description
min
typ
max
power supply
VDD
4.5
5.5
current consumption
with unloaded output
10
mA
VDD-0.8
output high level
output low level
output current
CMOS sink/source per channel
rise/fall time
units
0.4
mA
30
ns
INCREMENTAL CHARACTERISTICS
parameter
conditions/description
channels
quadrature A, B, and Z index
min
waveform
CMOS voltage square wave
phase difference
A leads B for CCW rotation (viewed from front)
quadrature resolutions1
96, 192, 200, 250, 384, 400, 500, 512, 768, 800,
1000, 1024
index
one pulse per 360 degree rotation
max
90
units
degrees
PPR
accuracy
quadrature duty cycle
Notes:
typ
0.2
degrees
50
1. Resolution selected via AMT Demo Board
ABSOLUTE POSITION CHARACTERISTICS
parameter
conditions/description
min
typ
resolution
positions
max
units
12
bits
encoder can be zero-set via SPI or AMT Demo Board
accuracy
0.2
cui.com
degrees
For more information, please visit the product page.
CUI Inc SERIES: AMT20 DESCRIPTION: MODULAR ABSOLUTE ENCODER
date 11/19/2014 page 2 of 10
MECHANICAL
parameter
conditions/description
min
motor shaft length
typ
max
weight
units
mm
15.7
axial play
0.3
mm
rotational speed
8000
RPM
max
units
125
85
ENVIRONMENTAL
parameter
conditions/description
min
operating temperature
typ
-40
humidity
non-condensing
vibration
10~500 Hz, 5 minute sweep, 2 hours on each XYZ
shock
3 pulses, 6 ms, 3 on each XYZ
RoHS
2011/65/EU
200
max
units
SERIAL INTERFACE
parameter
conditions/description
protocol
Serial Peripheral Interface (SPI)
controller
min
typ
SPI driven by onboard Microchip PIC16F6901
data rate
Note:
1. See Microchip documentation for additional detaisl.
WAVEFORMS
Figure 1
Quadrature signals with index showing
counter-clockwise rotation
X
A
T
The following parameters are defined by the resolution selected for each
encoder, where R = resolution.
Parameter
Description
Expression
Units
period
360/R
mechanical degrees
pulse width
T/2
mechanical degrees
index width
P/2
mechanical degrees
A/B state width
P/2
mechanical degrees
cui.com
MHz
For more information, please visit the product page.
CUI Inc SERIES: AMT20 DESCRIPTION: MODULAR ABSOLUTE ENCODER
date 11/19/2014 page 3 of 10
PART NUMBER KEY
The AMT203 is designed for 12 bit binary (4,096) operation. For customers who may use the optional quadrature output, one of the resolutions below may be
selected as the default quadrature output.
AMT203 - XXXX - XXXX - X- X
Mounting Base:
S = Standard
W= Wide
Base Number
Quadrature
Resolution (PPR):
0096
0500
0192
0512
0200
0768
0250
0800
0384
1000
0400
1024
Note:
Sleeve Bore Diameter:
2000 = 2 mm
3000 = 3 mm
3175 = 3.175 mm (1/8)
4000 = 4 mm
4760 = 4.76 mm (3/16)
5000 = 5 mm
6000 = 6 mm
6350 = 6.35 mm (1/4)
8000 = 8 mm
Connector Options:
"blank" = standard connector
C = locking connector
1. Conformal coating available upon request
AMT203-V KIT
In order to provide maximum flexibility for our customers, the AMT203 series is provided in kit form standard. This allows the user to implement the encoder
into a range of applications using one sku#, reducing engineering and inventory costs.
SLEEVES
2mm
3mm
1/8 inch
(3.175mm)
4mm
3/16 inch
(4.76mm)
5mm
6mm
1/4 inch
(6.35mm)
8mm
Light Sky
Blue
Orange
Purple
Gray
Yellow
Green
Red
Snow
Blue
BASE
TOP
COVER
SHAFT
ADAPTER
cui.com
TOOL A
TOOL C
For more information, please visit the product page.
CUI Inc SERIES: AMT20 DESCRIPTION: MODULAR ABSOLUTE ENCODER
date 11/19/2014 page 4 of 10
ENCODER INTERFACE
PINOUT CONNECTOR
Function
#
STANDARD
CONNECTOR OPTION
LOCKING
CONNECTOR OPTION
AMT203
N/A
CSB
MISO
GND
SCK
+5 V
MOSI
N/A
10
11
N/A
12
13
N/A
14
N/A
13 11 9
14 12 10 8
13 11 9
DETAIL B
SCALE 4 : 1
14 12 10 8
DETAIL B
SCALE 4 : 1
Mating Connector:
Samtec ISDF-07-D
Mating Connector:
Samtec ISDF-07-D-L
Demo Board Side
Encoder Side
1' 0.25"
(304.8)
Samtec
ISDF-07-D
Demo Board Cable
(Cable available without Demo Board Connector)
cui.com
28 AWG
10 conductor
1.27 mm pitch
For more information, please visit the product page.
CUI Inc SERIES: AMT20 DESCRIPTION: MODULAR ABSOLUTE ENCODER
date 11/19/2014 page 5 of 10
MECHANICAL DRAWING
AMT203
units: mm
tolerance: 0.1
10.34 0.407
R15.49 0.610
15.30 0.602
15.33 0.604
37.39 1.472
10.93 0.430
28.58 1.125
AMT203 WIDE BASE
units: mm
tolerance: 0.1
10.34 0.407
R15.49 0.610
15.30 0.602
15.33 0.604
37.39 1.472
28.58 1.125
10.93 0.430
52.70 2.075
cui.com
For more information, please visit the product page.
CUI Inc SERIES: AMT20 DESCRIPTION: MODULAR ABSOLUTE ENCODER
date 11/19/2014 page 6 of 10
MECHANICAL DRAWING (CONTINUED)
MOUNTING HOLE PATTERNS
STANDARD BASE
units: mm[inch]
tolerance: 0.1
22.00 0.866
21.55 0.848
20.90 0.823
R1.05 0.041
12.60[0.496]
DETAIL A
SCALE 4 : 1
2.00 0.079
(4 PLCS)
2.95 0.116
(2 PLCS)
16.00 0.630
0.275 0.011
A (3 PLCS)
1.70 0.067
(2 PLCS)
19.05 0.750
25.40 1.000
WIDE BASE
units: mm[inch]
tolerance: 0.1
32.44 1.277
3.00 0.118
(2 PLCS)
2.87 0.113
(2 PLCS)
46.20 1.819
cui.com
For more information, please visit the product page.
CUI Inc SERIES: AMT20 DESCRIPTION: MODULAR ABSOLUTE ENCODER
date 11/19/2014 page 7 of 10
ASSEMBLY PROCEDURE
STEP 1
STEP 2
STEP 3
Align Tool C with
flange on Base
1. Insert Tool A as a spacer that defines the distance to
the mounting surface.
2. Slide appropriate sized Sleeve over shaft all the way down to Tool A.
3. Slide Shaft Adaptor over Sleeve.
4. Use Tool C to press Shaft Adaptor over Sleeve (ensure Shaft Adapter
and Tool C spline alignment) until flush with Tool A.
STEP 4
1. Remove Tools A and C.
2. Place Base on motor, with Tool C used as a centering tool.
STEP 5
STEP 6
1. Snap the Top Cover onto the Base, carefully observing that the
teeth of the Shaft Adaptor align with the grooves in the hub. *
1. Fasten the Base on the motor (Tool C may need to be
rotated to allow for some mounting configurations).
2. Remove Tool C.
1. Align Tool C with flange on Base.
2. Slide Base and Tool C onto motor, centering onto
the Shaft Adapter.
* We recommend no more than three cycles of mounting and
removal of the AMT top cover base. Multiple cycles of mounting
and removing the top cover can cause base fatigue over time and
affect encoder performance.
cui.com
1. Make sure the snaps are fully engaged by pressing
on the Hub with the reverse side of Tool C.
2. When assembly is finished, the Shaft Adaptor, Sleeve
and Rotor Hub should all be flush with the Motor
Shaft rotating freely.
For more information, please visit the product page.
CUI Inc SERIES: AMT20 DESCRIPTION: MODULAR ABSOLUTE ENCODER
date 11/19/2014 page 8 of 10
APPLICATION NOTES
ENCODER OPERATIONAL MODE
Initialization mode: At power up the encoder goes through an initiation and stabilization procedure. This includes microprocessor
stabilization and the program for getting the absolute start position. This takes less than 100 milliseconds.
Tracking mode:
1.
MCU 12 bit position register is updated from every 48 s.
2.
For accurate position information without the 48 s incremental outputs A/B can be used for tracking. These outputs are
operational up to 8000 RPM without speed error.
3.
When using the incremental output there also is a Z index pulse that occurs once per turn.
SERIAL PERIPHERAL INTERFACE COMMANDS
The Serial Peripheral Interface (SPI) bus is a standard serial interface that operates in full duplex mode. It consists of 4 signals:
1.
MOSI: Master Out Slave In
2.
MISO: Master In Slave Out
3.
SCK: Serial Clock
4.
CSB: Chip Select (active low)
SPI BUS
The SPI bus transfers multiples of 8 bits in a frame. Data is captured on the rising edge of SCK and the output data is changed after
the falling edge of SCK.
MISO
LSB
MSB
SCK
MOSI
CSB
LSB
MSB
Terminology
MSB = most significant byte
LSB = least significant byte
msb = most significant bit
lsb = least significant bit
Setup
Serial Peripheral Interface Bus (SPI) on AMT203 Timing Diagram
(Figure 1)
The data out on MISO is valid once CSB goes low. The MOSI data is valid after the falling edge of SCK. The encoder drives data out on
MISO for as long as CSB is low.
Normally, CSB goes low, then after 8 clock cycles the command is interpreted. CSB high resets the clock counter, and terminates any
command sequence.
cui.com
For more information, please visit the product page.
CUI Inc SERIES: AMT20 DESCRIPTION: MODULAR ABSOLUTE ENCODER
date 11/19/2014 page 9 of 10
APPLICATION NOTES (CONTINUED)
SPI COMMANDS
All commands are 8 bits long. The msb is shifted in first, and is the leftmost bit shown in Figure 1.
Encoder Protocol Considerations:
The encoder is designed to operate with a high speed SPI link, in full duplex mode. This implies the host can issue commands and
read data as quickly as necessary but there has to be an acknowledgement from the slave just before the data is transferred.
First the host will issue a command, then the encoder may respond with wait responses (0xA5) until ready. Once ready the encoder
will echo the original command received from the master, followed by the requested data.
For example, to read the position the master will send the rd_pos command (0x10), it will then send no operation commands (nop_
a5, 0x00) until it receives the original rd_pos command back. Once it receives the rd_pos response from the encoder, it knows that
the next two bytes of data will be the MSB and the LSB respectively. To receive those two bytes the master will send two no operation
commands.
It is recommended that the master leave a 20 s delay between reads to avoid extending the read time by forcing wait sequences.
Command 0x00: nop_a5 (no operation)
This no operation command is ignored by the encoder and simply causes the next byte of data to be read. The encoder will respond
with 0xA5 if there is no remaining data to be sent.
Command 0x10: rd_pos (read position)
This command causes a read of the current position.
To read
1.
2.
3.
4.
position this sequence should be followed:
Master sends rd_pos command. Encoder responds with idle character.
Continue sending nop_a5 command while encoder response is 0xA5
If response was 0x10 (rd_pos), send nop_a5 and receive MSB position (lower 4 bits of this byte are the upper 4 of the 12-bit
position)
Send second nop_a5 command and receive LSB position (lower 8 bits of 12-bit positon)
Note that it is possible to overlap commands. For instance, instead of issuing nop_a5 for steps 3 and 4, you could begin another read
position sequence since the position data is already in the buffer. The read and write FIFOs for the streams are 16 bytes long and it is
up to the user to avoid overflow.
Command 0x70: set_zero_point (zero set)
This command sets the current position to zero and saves this setting in the EEPROM.
To set the zero point this sequence should be followed:
1.
Send set_zero_point command
2.
Send nop_a5 command while response is not 0x80
3.
A response of 0x80 means that the zero set was successful and the new position offset is stored in EEPROM.
4.
The encoder must be power cycled. If the encoder is not power cycled, the position values will not be calculated off the latest
zero position. When the encoder is powered on next the new offset will be used for the position calculation.
cui.com
For more information, please visit the product page.
CUI Inc SERIES: AMT20 DESCRIPTION: MODULAR ABSOLUTE ENCODER
date 11/19/2014 page 10 of 10
REVISION HISTORY
rev.
description
date
1.0
initial release
05/01/2010
1.01
updated pin-out
10/01/2010
1.02
updated application note
01/01/2011
1.03
updated SPI commands
09/16/2011
1.04
addition of shock and incremental output current data, correction of
vibration data, updated part number key
09/30/2011
1.05
updated Part Number Key
03/09/2012
1.06
updated tools
07/13/2012
1.07
added locking connector drawing
02/12/2013
1.08
updated spec
12/09/2013
updated spec
11/19/2014
1.09
The revision history provided is for informational purposes only and is believed to be accurate.
Headquarters
20050 SW 112th Ave.
Tualatin, OR 97062
800.275.4899
Fax 503.612.2383
cui.com
techsupport@cui.com
CUI offers a one (1) year limited warranty. Complete warranty information is listed on our website.
CUI reserves the right to make changes to the product at any time without notice. Information provided by CUI is believed to be accurate and reliable. However, no responsibility is
assumed by CUI for its use, nor for any infringements of patents or other rights of third parties which may result from its use.
CUI products are not authorized or warranted for use as critical components in equipment that requires an extremely high level of reliability. A critical component is any component of a
life support device or system whose failure to perform can be reasonably expected to cause the failure of the life support device or system, or to affect its safety or effectiveness.
Potrebbero piacerti anche
- Trace and Draw: Created by A Teachable TeacherDocumento18 pagineTrace and Draw: Created by A Teachable TeacherNicoleta Dragan100% (1)
- c64 Service ManualDocumento30 paginec64 Service ManualJG NetoNessuna valutazione finora
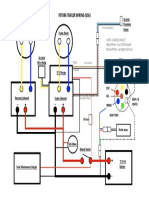
- Futura Trailers - Winch-Box-WiringDocumento1 paginaFutura Trailers - Winch-Box-Wiringsthollander100% (1)
- Pre StressingDocumento48 paginePre StressingRameshNessuna valutazione finora
- Data Structures and Algorithms in Python SlidesDocumento917 pagineData Structures and Algorithms in Python SlidesSai Varma100% (2)
- The CNC Handbook: Digital Manufacturing and Automation from CNC to Industry 4.0Da EverandThe CNC Handbook: Digital Manufacturing and Automation from CNC to Industry 4.0Valutazione: 5 su 5 stelle5/5 (1)
- CMC Brushless Servo Motor 2011 CatalogDocumento4 pagineCMC Brushless Servo Motor 2011 CatalogServo2GoNessuna valutazione finora
- Zeiss AI EbookDocumento56 pagineZeiss AI EbookRaylson De SÁ Melo UFCNessuna valutazione finora
- (Chapter 8) Data Structures and CAATTs For Data ExtractionDocumento30 pagine(Chapter 8) Data Structures and CAATTs For Data ExtractionTrayle HeartNessuna valutazione finora
- Fanuc 0i-MD Standard Features and OptionsDocumento9 pagineFanuc 0i-MD Standard Features and OptionsАнѓелковска МаријаNessuna valutazione finora
- TM-1861 AVEVA Administration (1.4) System Administration Rev 1.0Documento106 pagineTM-1861 AVEVA Administration (1.4) System Administration Rev 1.0praveen jangir100% (2)
- Tutorial OcamlDocumento22 pagineTutorial OcamlРатлїк ТэяяэшаттэNessuna valutazione finora
- Ma 0702 05 en 00 - Setup ManualDocumento214 pagineMa 0702 05 en 00 - Setup ManualRoronoa ZorroNessuna valutazione finora
- Release Notes TIA Selection Tool enDocumento11 pagineRelease Notes TIA Selection Tool enKhiem NguyenNessuna valutazione finora
- Encoder AMT10-VDocumento8 pagineEncoder AMT10-Vpop1312Nessuna valutazione finora
- Dyadic Mechatronics Cylinder CatalogDocumento16 pagineDyadic Mechatronics Cylinder CatalogElectromateNessuna valutazione finora
- 1.2encoder AMT 103Documento29 pagine1.2encoder AMT 103MegaroboMegaroboNessuna valutazione finora
- 3540i Hardware ManualDocumento14 pagine3540i Hardware ManualRicardo PossebonNessuna valutazione finora
- MicroESystems Mercury3000VSi DataSheetDocumento10 pagineMicroESystems Mercury3000VSi DataSheetElectromateNessuna valutazione finora
- Model 770 Ordering GuideDocumento2 pagineModel 770 Ordering GuideSkiFy AlexNessuna valutazione finora
- Axm-II Configurable Motion PlatformDocumento88 pagineAxm-II Configurable Motion PlatformLeunamezNessuna valutazione finora
- MiniAx User Guide - Issue 1Documento37 pagineMiniAx User Guide - Issue 1Control CheckNessuna valutazione finora
- V20 LaunchedDocumento147 pagineV20 LaunchedNguyễn Viết HùngNessuna valutazione finora
- MDX A and Compact To MDXB (En)Documento21 pagineMDX A and Compact To MDXB (En)Josmar GuidinoNessuna valutazione finora
- HS25 Incremental EncoderDocumento4 pagineHS25 Incremental Encoderoswaldo58Nessuna valutazione finora
- LCM Module: Industrial Co., LTDDocumento18 pagineLCM Module: Industrial Co., LTDelectropicNessuna valutazione finora
- Sony Dsr-pd175 - pd177 - pd198 Service ManualDocumento249 pagineSony Dsr-pd175 - pd177 - pd198 Service ManualPrime Lens100% (4)
- IT3401C Codeur RotatifDocumento4 pagineIT3401C Codeur RotatifDejuan HuffNessuna valutazione finora
- Lm190e03 PDFDocumento30 pagineLm190e03 PDFShiMMyShaKeNessuna valutazione finora
- Prisma Technical GuideDocumento61 paginePrisma Technical Guidenooruddinkhan1Nessuna valutazione finora
- Sentron 3WT BrochureDocumento6 pagineSentron 3WT BrochureAchint KumarNessuna valutazione finora
- MH5S MH5LS DXM100Documento2 pagineMH5S MH5LS DXM100Myagmarbayar NerguiNessuna valutazione finora
- Basecam Simple BGCDocumento16 pagineBasecam Simple BGCMarco Aurelio Jiménez ReyesNessuna valutazione finora
- LM 2070-02 MinDocumento4 pagineLM 2070-02 Minsanthan1986Nessuna valutazione finora
- Datasheet Amt102 EncoderDocumento8 pagineDatasheet Amt102 EncoderPablo Davila100% (1)
- La7693X Series: Built-In CTV Microcontroller Video and Sound Processing Ics (Vif/Sif/Y/C/Deflection/Cbcr In)Documento6 pagineLa7693X Series: Built-In CTV Microcontroller Video and Sound Processing Ics (Vif/Sif/Y/C/Deflection/Cbcr In)amadou1Nessuna valutazione finora
- Indracontrol S20 Analog Input Module 8 Inputs: FeaturesDocumento20 pagineIndracontrol S20 Analog Input Module 8 Inputs: FeaturesDaniel LimaNessuna valutazione finora
- Schneider Soft Starter ATS22 enDocumento20 pagineSchneider Soft Starter ATS22 enchandraprakashhhNessuna valutazione finora
- USDigital SM23 Data 5pDocumento5 pagineUSDigital SM23 Data 5pHayk MartirosianNessuna valutazione finora
- Dyadic Systems 2011 CatalogDocumento16 pagineDyadic Systems 2011 CatalogServo2GoNessuna valutazione finora
- Mitutoyo Contador KA y Escalas LinealesDocumento17 pagineMitutoyo Contador KA y Escalas LinealesMarco CortésNessuna valutazione finora
- CBI QA (13) - Series Circuit Breakers Data SheetDocumento6 pagineCBI QA (13) - Series Circuit Breakers Data SheetKhashane Willy MohaleNessuna valutazione finora
- S1D15G00 Rev1 0Documento64 pagineS1D15G00 Rev1 0Nikolay KostadinovNessuna valutazione finora
- Citizen: Service ManualDocumento41 pagineCitizen: Service Manualmarcos antonio provoste loaizaNessuna valutazione finora
- MS4600 Datasheet en 201507 F266I-E-01Documento7 pagineMS4600 Datasheet en 201507 F266I-E-01Eliezer DominguezNessuna valutazione finora
- Torque Systems Rs23 SpecsheetDocumento2 pagineTorque Systems Rs23 SpecsheetElectromateNessuna valutazione finora
- Torque Systems MDM Stainless Steel Series Product GuideDocumento4 pagineTorque Systems MDM Stainless Steel Series Product GuideElectromateNessuna valutazione finora
- LV10-1 English 1Documento54 pagineLV10-1 English 1Jaya AdiwigunaNessuna valutazione finora
- Drehgeber Übersicht - en - Web PDFDocumento44 pagineDrehgeber Übersicht - en - Web PDFRăzvan PopaNessuna valutazione finora
- Dyadic Systems 2011 CatalogDocumento16 pagineDyadic Systems 2011 CatalogElectromateNessuna valutazione finora
- Torque Systems Linear Actuator Product GuideDocumento5 pagineTorque Systems Linear Actuator Product GuideElectromateNessuna valutazione finora
- Payload: 80 KG: DX100 Controller Powerful Performance in A Mid-Size RobotDocumento2 paginePayload: 80 KG: DX100 Controller Powerful Performance in A Mid-Size RobotRuben AlvaradoNessuna valutazione finora
- Abb Acs350 Technical CatalogeDocumento12 pagineAbb Acs350 Technical CatalogeNguyễn Minh CườngNessuna valutazione finora
- Joining Systems New 960-283eDocumento16 pagineJoining Systems New 960-283eNenad IlicNessuna valutazione finora
- Cedar TorqueDocumento20 pagineCedar TorqueJohan KaufmannNessuna valutazione finora
- Sony hcd-fc8, fc9 PDFDocumento140 pagineSony hcd-fc8, fc9 PDFRaymundo Moran LopezNessuna valutazione finora
- Fanuc 0i-TD Mate Standard Features and OptionsDocumento7 pagineFanuc 0i-TD Mate Standard Features and OptionsTamil SelvanNessuna valutazione finora
- Kmi15 4Documento16 pagineKmi15 4Munish JainNessuna valutazione finora
- Vayu PDFDocumento6 pagineVayu PDFYuppy KanalNessuna valutazione finora
- Torque Systems Bmr2000 SpecsheetDocumento4 pagineTorque Systems Bmr2000 SpecsheetElectromateNessuna valutazione finora
- Minas A DriverDocumento14 pagineMinas A DriverPham Long100% (1)
- MCCB - XS 2000 - 3200 NeDocumento7 pagineMCCB - XS 2000 - 3200 NeFernando SantanaNessuna valutazione finora
- Base Processor Terminal CommandsDocumento66 pagineBase Processor Terminal CommandssharadsirohiNessuna valutazione finora
- Afe 2DDocumento2 pagineAfe 2DthimhaNessuna valutazione finora
- It6427-0409 SMDocumento24 pagineIt6427-0409 SMavalente112100% (1)
- Amb 1050 Fme-U / 1050 Fme-U DiDocumento2 pagineAmb 1050 Fme-U / 1050 Fme-U DisthollanderNessuna valutazione finora
- ACORN CNC Controller - Rev4 Specifications ManualDocumento15 pagineACORN CNC Controller - Rev4 Specifications ManualsthollanderNessuna valutazione finora
- Tormach MicroARC 4th AxisDocumento8 pagineTormach MicroARC 4th AxissthollanderNessuna valutazione finora
- Wanhao I3 Unboxing and Hardware Set Up Rev.d PDFDocumento11 pagineWanhao I3 Unboxing and Hardware Set Up Rev.d PDFsthollanderNessuna valutazione finora
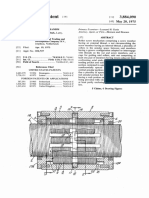
- US Patent 3884090Documento5 pagineUS Patent 3884090sthollanderNessuna valutazione finora
- Wanhao Quick Guidance REV.ADocumento2 pagineWanhao Quick Guidance REV.AsthollanderNessuna valutazione finora
- Avnet Ultra96Documento2 pagineAvnet Ultra96sthollanderNessuna valutazione finora
- Tribol™ GR CLS 000: DescriptionDocumento2 pagineTribol™ GR CLS 000: DescriptionsthollanderNessuna valutazione finora
- Data Sheet of Chiwawa - AR9331 LGA ModuleDocumento8 pagineData Sheet of Chiwawa - AR9331 LGA ModulesthollanderNessuna valutazione finora
- Datasheet - M542H Stepper Motor DriverDocumento10 pagineDatasheet - M542H Stepper Motor DriversthollanderNessuna valutazione finora
- QNX 2.2 Parts List & Installation NoteDocumento2 pagineQNX 2.2 Parts List & Installation NotesthollanderNessuna valutazione finora
- Topic 1Documento6 pagineTopic 1Linesh 2021Nessuna valutazione finora
- Group 1 Revised Proposal. Patient Records Management SystemDocumento2 pagineGroup 1 Revised Proposal. Patient Records Management SystemAlioding M. MacarimbangNessuna valutazione finora
- Finder Relays Series 80Documento7 pagineFinder Relays Series 80rg cpeccNessuna valutazione finora
- Relee Modulare FINDERDocumento76 pagineRelee Modulare FINDERionutNessuna valutazione finora
- HERNIS CCTV Multi CablesDocumento3 pagineHERNIS CCTV Multi CablestqhunghnNessuna valutazione finora
- HCL Company ProfileDocumento5 pagineHCL Company Profilearchana palNessuna valutazione finora
- International Journal of Accounting & Information ManagementDocumento23 pagineInternational Journal of Accounting & Information ManagementAboneh TeshomeNessuna valutazione finora
- Marcelo - STS 11 - Activity 1Documento10 pagineMarcelo - STS 11 - Activity 1MARCELO, FRANCIS MICHAEL S.Nessuna valutazione finora
- An Industrial Training Report PDFDocumento41 pagineAn Industrial Training Report PDFMayank ChoudharyNessuna valutazione finora
- Deeksha Negi: @negideekshaaDocumento6 pagineDeeksha Negi: @negideekshaaShrish PratapNessuna valutazione finora
- Crystal Test SetDocumento8 pagineCrystal Test Setstanpjames2309Nessuna valutazione finora
- HP Phenomenon of Flow Distribution in ManifoldsDocumento3 pagineHP Phenomenon of Flow Distribution in Manifoldsaegean227Nessuna valutazione finora
- Dbms-5-Carol - Advanced Data ModelingDocumento45 pagineDbms-5-Carol - Advanced Data ModelingADE FIKRY MUSTOFANessuna valutazione finora
- Types of Circuit BreakersDocumento23 pagineTypes of Circuit Breakerspmankad60% (5)
- Carrier Water Cooled Package Unit - tcm177-85755Documento9 pagineCarrier Water Cooled Package Unit - tcm177-85755Ravindra JadhavNessuna valutazione finora
- Stonex R35 Upgrading ProcedureDocumento6 pagineStonex R35 Upgrading ProcedurevalyNessuna valutazione finora
- GE Jenbacher High Efficiency ConceptDocumento9 pagineGE Jenbacher High Efficiency Conceptjulihardo parulian simarmataNessuna valutazione finora
- Easyio FG Series, Fs Series and FW Series Peer To Peer User GuideDocumento12 pagineEasyio FG Series, Fs Series and FW Series Peer To Peer User Guidenguyendinhphuc22008Nessuna valutazione finora
- User Manual: Indoor Multi-Function Environment SensorDocumento9 pagineUser Manual: Indoor Multi-Function Environment SensorsoefmuangmaungchitNessuna valutazione finora
- Fdocuments - in Bomb Calorimeter Junkers CalorimeterDocumento11 pagineFdocuments - in Bomb Calorimeter Junkers CalorimeterPratik ChoudhuryNessuna valutazione finora
- Manual de Usuario PTZ HiLookDocumento101 pagineManual de Usuario PTZ HiLookIvan Alvarado GNessuna valutazione finora
- Multicalor 700.1 MD Multicalor 800.1 MD Multicalor 1000.1 MD Multicalor 1200.1 MDDocumento24 pagineMulticalor 700.1 MD Multicalor 800.1 MD Multicalor 1000.1 MD Multicalor 1200.1 MDcristian villegasNessuna valutazione finora
- TC600EDocumento2 pagineTC600ERadekNessuna valutazione finora