Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- 19A Time Collection Device Integration Activity Guide PDFDocumento78 pagine19A Time Collection Device Integration Activity Guide PDFAliya AmarNessuna valutazione finora
- Linear ProgrammingDocumento6 pagineLinear ProgrammingabeerNessuna valutazione finora
- TV FaultsDocumento1.026 pagineTV Faultsdasho1Nessuna valutazione finora
- Ic 1403 2 MarksDocumento14 pagineIc 1403 2 MarksJeya Prakash100% (2)
- XPath PresentationDocumento14 pagineXPath PresentationJantrik ShopnoNessuna valutazione finora
- DTC 5618Documento20 pagineDTC 5618Gajaram SutharNessuna valutazione finora
- Novel PWM Inverter Strategy For A Inverter Open End Winding Induction MotorDocumento7 pagineNovel PWM Inverter Strategy For A Inverter Open End Winding Induction MotorGanesh ChallaNessuna valutazione finora
- Microsoft Word - Exercise 3 Subsea P&PDocumento5 pagineMicrosoft Word - Exercise 3 Subsea P&PKRNessuna valutazione finora
- Concrete Pumping Cop 2005 PDFDocumento27 pagineConcrete Pumping Cop 2005 PDFShoaib HassanNessuna valutazione finora
- 2008 Nissan Teana J32 Service Manual-HacDocumento245 pagine2008 Nissan Teana J32 Service Manual-HacMrihexNessuna valutazione finora
- Lewmar Marine Equipment Guide Ed 14Documento224 pagineLewmar Marine Equipment Guide Ed 14Renato Fonseca100% (1)
- Composition Code ExampleDocumento3 pagineComposition Code ExampleREBEL USMANNessuna valutazione finora
- Trane VAV Equipment SpecificationsDocumento52 pagineTrane VAV Equipment Specificationsyu4212Nessuna valutazione finora
- SAP ABAP ResumeDocumento3 pagineSAP ABAP Resumeshakti1392821Nessuna valutazione finora
- Automatic Transmission: Models FA and FB With Allison AT542Documento22 pagineAutomatic Transmission: Models FA and FB With Allison AT542nguyenxuanvinhv3Nessuna valutazione finora
- Inlet Modules Model Code: ExampleDocumento1 paginaInlet Modules Model Code: ExamplemhasansharifiNessuna valutazione finora
- EL CID Stator Core TestDocumento2 pagineEL CID Stator Core TestAnonymous CO7aaHrNessuna valutazione finora
- Built in Classes in JavaDocumento104 pagineBuilt in Classes in JavaarchanaNessuna valutazione finora
- Tool PresettingDocumento22 pagineTool PresettingAtulMaurya100% (1)
- 1082-Adding New Replication From Sybase To OracleDocumento4 pagine1082-Adding New Replication From Sybase To Oraclegirish10670Nessuna valutazione finora
- SP2000 COD Testkits 2014Documento5 pagineSP2000 COD Testkits 2014Andres FalmacelNessuna valutazione finora
- Notes On Foam From SFPE HandbookDocumento10 pagineNotes On Foam From SFPE HandbookkdsessionsNessuna valutazione finora
- Software: Measurlink Is An Easy-To-Use, Windows-Based Family of Quality Data Management Software ApplicationsDocumento8 pagineSoftware: Measurlink Is An Easy-To-Use, Windows-Based Family of Quality Data Management Software ApplicationsBrandi DaleNessuna valutazione finora
- Tappi 0502-17 Papermaker FormulaDocumento19 pagineTappi 0502-17 Papermaker FormulaMulyadi Moel86% (21)
- P287 SCIL Programming BasicsDocumento78 pagineP287 SCIL Programming BasicsOscar GarciaNessuna valutazione finora
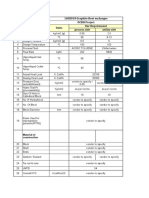
- 16HE018 Graphite Heat Exchanger DCBH Project Sr. No. Particulars Units Our Requirement Process Side Utility SideDocumento2 pagine16HE018 Graphite Heat Exchanger DCBH Project Sr. No. Particulars Units Our Requirement Process Side Utility SideBhaumik BhuvaNessuna valutazione finora
- 74HC195Documento10 pagine74HC195MUHAMMAD SISWANTORONessuna valutazione finora
- Ta Elastomer Cure DatesDocumento3 pagineTa Elastomer Cure DatesRay FaiersNessuna valutazione finora
- Et154 PDFDocumento6 pagineEt154 PDFbytecNessuna valutazione finora
- 90 61 085 Transportation ValvesDocumento18 pagine90 61 085 Transportation ValvesarrikanNessuna valutazione finora