Potrebbero piacerti anche
- Introduction Ship Design EngineeringDocumento69 pagineIntroduction Ship Design EngineeringUNsha bee komNessuna valutazione finora
- Aircraft Parametric 3dDocumento131 pagineAircraft Parametric 3dUNsha bee komNessuna valutazione finora
- NavyDocumento74 pagineNavyUNsha bee komNessuna valutazione finora
- Design of A 4-SeatDocumento46 pagineDesign of A 4-SeatUNsha bee komNessuna valutazione finora
- Aero 7sem Ae2404lmDocumento35 pagineAero 7sem Ae2404lmUNsha bee komNessuna valutazione finora
- 63 B 3Documento4 pagine63 B 3UNsha bee komNessuna valutazione finora
- Aircraft Design Project-1 of Fighter byDocumento82 pagineAircraft Design Project-1 of Fighter byUNsha bee komNessuna valutazione finora
- R&D Planning and Governance: Ronald P. Evens and Joel CovinskyDocumento34 pagineR&D Planning and Governance: Ronald P. Evens and Joel CovinskyUNsha bee komNessuna valutazione finora
- FULLTEXT01Documento117 pagineFULLTEXT01UNsha bee komNessuna valutazione finora
- Kaplan Turbine Hill Dig Thesis PDFDocumento210 pagineKaplan Turbine Hill Dig Thesis PDFUNsha bee kom100% (2)
- Wind Energy FULLTEXT01Documento99 pagineWind Energy FULLTEXT01UNsha bee komNessuna valutazione finora
- Impact Assessment Case Studies From Southern Africa: SaieaDocumento14 pagineImpact Assessment Case Studies From Southern Africa: SaieaUNsha bee komNessuna valutazione finora
- Gas Cutting Pressure Tip Chart PDFDocumento2 pagineGas Cutting Pressure Tip Chart PDFChozha RajanNessuna valutazione finora
- Darrin Willis Masters Thesis Corrected FinalDocumento167 pagineDarrin Willis Masters Thesis Corrected FinalUNsha bee komNessuna valutazione finora
- Cycloidal TrajectorysimulinkDocumento8 pagineCycloidal TrajectorysimulinkUNsha bee komNessuna valutazione finora
- Finite Element Analysis: Analyzing Pressure Vessels Using Fea in CatiaDocumento6 pagineFinite Element Analysis: Analyzing Pressure Vessels Using Fea in CatiaUNsha bee komNessuna valutazione finora
- Chapter 8 Two-Dimensional Problem SolutionDocumento51 pagineChapter 8 Two-Dimensional Problem SolutionUNsha bee kom100% (1)
- Aircraft Equations of Motion - 2Documento26 pagineAircraft Equations of Motion - 2UNsha bee komNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Moving Money Box: Pig (Assembly Instructions) : The Movements Work Better With Heavier CoinsDocumento6 pagineMoving Money Box: Pig (Assembly Instructions) : The Movements Work Better With Heavier CoinsjuanNessuna valutazione finora
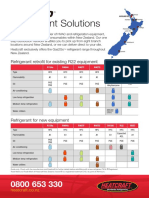
- Refrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentDocumento2 pagineRefrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentpriyoNessuna valutazione finora
- NMMT City Bus SystemDocumento3 pagineNMMT City Bus Systemharish guptaNessuna valutazione finora
- Unit-3 DC Machines IMP QuestionsDocumento30 pagineUnit-3 DC Machines IMP Questionskrishna Sai Atla VenkataNessuna valutazione finora
- Driver DST-4812 For 7.2 KG CMDocumento5 pagineDriver DST-4812 For 7.2 KG CMWWW.150775.BUGME.PWNessuna valutazione finora
- 2019 BMS1021 Practice Questions Answers PDFDocumento12 pagine2019 BMS1021 Practice Questions Answers PDFaskldhfdasjkNessuna valutazione finora
- B.W.G. - Birmingham Wire Gauge: The Wall Thickness of Pipes - Gauge and Decimal Parts of An InchDocumento3 pagineB.W.G. - Birmingham Wire Gauge: The Wall Thickness of Pipes - Gauge and Decimal Parts of An InchLuis Fernando Perez LaraNessuna valutazione finora
- Facility Systems, Ground Support Systems, and Ground Support EquipmentDocumento97 pagineFacility Systems, Ground Support Systems, and Ground Support EquipmentSree288Nessuna valutazione finora
- Caeneus and PoseidonDocumento77 pagineCaeneus and PoseidonSabrina CareyNessuna valutazione finora
- L15 - Parallel Magnetic CircuitsDocumento6 pagineL15 - Parallel Magnetic CircuitsParikshit MishraNessuna valutazione finora
- Contactor - SchniderDocumento28 pagineContactor - SchniderPramod DixitNessuna valutazione finora
- Reflection in SystemsDocumento1 paginaReflection in SystemsGeraldine PadillaNessuna valutazione finora
- Nav Bharat Nirman: Indispensable Ideas For Green, Clean and Healthy IndiaDocumento4 pagineNav Bharat Nirman: Indispensable Ideas For Green, Clean and Healthy IndiaRishabh KatiyarNessuna valutazione finora
- JCB R135 & R155-HD Skid Steer-New BrochureDocumento8 pagineJCB R135 & R155-HD Skid Steer-New BrochureAshraf KadabaNessuna valutazione finora
- LTE 3GPP Band13 Test Entrance CriteriaDocumento130 pagineLTE 3GPP Band13 Test Entrance CriteriaBuchi Reddy0% (1)
- AS-Interface Devices: (Slave Modules)Documento48 pagineAS-Interface Devices: (Slave Modules)Muhamad PriyatnaNessuna valutazione finora
- Bahir Dar NDP UDP - Final ReportDocumento188 pagineBahir Dar NDP UDP - Final ReportWorkuMamo100% (1)
- LH514 - OkokDocumento6 pagineLH514 - OkokVictor Yañez Sepulveda100% (1)
- WPP Jak Campus - Defect All Level - 18042023Documento15 pagineWPP Jak Campus - Defect All Level - 18042023bbm FebriNessuna valutazione finora
- Oc818 Manual v03-1Documento5 pagineOc818 Manual v03-1Luca PayetNessuna valutazione finora
- Complex Sentences For IELTS SpeakingDocumento16 pagineComplex Sentences For IELTS SpeakingWill Go NalamNessuna valutazione finora
- AD&D - Forgotten Realms - Menzoberranzan - EXTRAS - House Do'Urden RestrospectiveDocumento16 pagineAD&D - Forgotten Realms - Menzoberranzan - EXTRAS - House Do'Urden RestrospectiveThiago RaulinoNessuna valutazione finora
- Modern Residential Housing in UAEDocumento15 pagineModern Residential Housing in UAEBee Dan BudhachettriNessuna valutazione finora
- SpeedFace M4 DatasheetDocumento2 pagineSpeedFace M4 DatasheetRENJITH K NAIRNessuna valutazione finora
- Orona Fault CodesDocumento19 pagineOrona Fault CodesDanushka Bandara100% (1)
- Watercolor SecretsDocumento60 pagineWatercolor Secretsmissdoisneau98% (47)
- Maharashtra Brochure (2023)Documento4 pagineMaharashtra Brochure (2023)assmexellenceNessuna valutazione finora
- Chapter - 2 - Unit Hydrograph2Documento33 pagineChapter - 2 - Unit Hydrograph2Abhilekh PaudelNessuna valutazione finora
- 240-Article Text-799-3-10-20190203Documento6 pagine240-Article Text-799-3-10-20190203EVANDRO FRANCO DA ROCHANessuna valutazione finora
- BSO 04cDocumento267 pagineBSO 04cSamikshya BNessuna valutazione finora