Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Grid Power Quality Improvement and Battery Energy Storage in Wind Energy SystemsDocumento6 pagineGrid Power Quality Improvement and Battery Energy Storage in Wind Energy SystemsSharath ChandraNessuna valutazione finora
- Grid Power Quality Improvement and Battery Energy Storage in Wind Energy SystemsDocumento6 pagineGrid Power Quality Improvement and Battery Energy Storage in Wind Energy SystemsSharath ChandraNessuna valutazione finora
- 1-s2.0-S18Grid Support With Variable Speed Wind Energy System and Battery Storage For Power Quality76610211019618-MainDocumento10 pagine1-s2.0-S18Grid Support With Variable Speed Wind Energy System and Battery Storage For Power Quality76610211019618-MainSharath ChandraNessuna valutazione finora
- Flexible AC Transmission SystemDocumento30 pagineFlexible AC Transmission SystemSharath ChandraNessuna valutazione finora
- Michael Clapis Cylinder BlocksDocumento5 pagineMichael Clapis Cylinder Blocksapi-734979884Nessuna valutazione finora
- Work Energy Power SlidesDocumento36 pagineWork Energy Power Slidessweehian844100% (1)
- Abnt NBR 16868 1 Alvenaria Estrutural ProjetoDocumento77 pagineAbnt NBR 16868 1 Alvenaria Estrutural ProjetoGIOVANNI BRUNO COELHO DE PAULANessuna valutazione finora
- Trucks Part NumbersDocumento51 pagineTrucks Part NumbersBadia MudhishNessuna valutazione finora
- Load Chart Crane LiftingDocumento25 pagineLoad Chart Crane LiftingLauren'sclub EnglishBimbel Sd-sma100% (1)
- Internal Resistance To Corrosion in SHS - To Go On WebsiteDocumento48 pagineInternal Resistance To Corrosion in SHS - To Go On WebsitetheodorebayuNessuna valutazione finora
- AMS ANALITICA-AIRFLOW TSP-HVS BrochureDocumento1 paginaAMS ANALITICA-AIRFLOW TSP-HVS BrochureShady HellaNessuna valutazione finora
- Expression of Interest (Eoi)Documento1 paginaExpression of Interest (Eoi)Mozaffar HussainNessuna valutazione finora
- EPW, Vol.58, Issue No.44, 04 Nov 2023Documento66 pagineEPW, Vol.58, Issue No.44, 04 Nov 2023akashupscmadeeaseNessuna valutazione finora
- G.Devendiran: Career ObjectiveDocumento2 pagineG.Devendiran: Career ObjectiveSadha SivamNessuna valutazione finora
- Pyramid Type Plate Bending MachineDocumento10 paginePyramid Type Plate Bending MachineAswin JosephNessuna valutazione finora
- Sim Uge1Documento62 pagineSim Uge1ALLIAH NICHOLE SEPADANessuna valutazione finora
- Kübler 5800-5820 - enDocumento5 pagineKübler 5800-5820 - enpomsarexnbNessuna valutazione finora
- LC For Akij Biax Films Limited: CO2012102 0 December 22, 2020Documento2 pagineLC For Akij Biax Films Limited: CO2012102 0 December 22, 2020Mahadi Hassan ShemulNessuna valutazione finora
- Swelab Alfa Plus User Manual V12Documento100 pagineSwelab Alfa Plus User Manual V12ERICKNessuna valutazione finora
- Documentation Report On School's Direction SettingDocumento24 pagineDocumentation Report On School's Direction SettingSheila May FielNessuna valutazione finora
- White Paper: 1 Definitive Guide To Data QualityDocumento18 pagineWhite Paper: 1 Definitive Guide To Data QualityGonçalo MartinsNessuna valutazione finora
- Core CompetenciesDocumento3 pagineCore Competenciesapi-521620733Nessuna valutazione finora
- Calculating Free Energies Using Adaptive Biasing Force MethodDocumento14 pagineCalculating Free Energies Using Adaptive Biasing Force MethodAmin SagarNessuna valutazione finora
- 5.0008786 Aluminum GrapheneDocumento11 pagine5.0008786 Aluminum GrapheneBensinghdhasNessuna valutazione finora
- Chapter 01 What Is Statistics?Documento18 pagineChapter 01 What Is Statistics?windyuriNessuna valutazione finora
- CL Honours Report NamanDocumento11 pagineCL Honours Report NamanNaman VermaNessuna valutazione finora
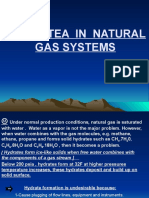
- Chapter 2 HydrateDocumento38 pagineChapter 2 HydrateTaha Azab MouridNessuna valutazione finora
- Ethernet/Ip Parallel Redundancy Protocol: Application TechniqueDocumento50 pagineEthernet/Ip Parallel Redundancy Protocol: Application Techniquegnazareth_Nessuna valutazione finora
- SDS ERSA Rev 0Documento156 pagineSDS ERSA Rev 0EdgarVelosoCastroNessuna valutazione finora
- Sony x300 ManualDocumento8 pagineSony x300 ManualMarcosCanforaNessuna valutazione finora
- BIOAVAILABILITY AND BIOEQUIVALANCE STUDIES Final - PPTX'Documento32 pagineBIOAVAILABILITY AND BIOEQUIVALANCE STUDIES Final - PPTX'Md TayfuzzamanNessuna valutazione finora
- PTW Site Instruction NewDocumento17 paginePTW Site Instruction NewAnonymous JtYvKt5XENessuna valutazione finora
- Government Hazi Muhammad Mohsin College Chattogram: Admission FormDocumento1 paginaGovernment Hazi Muhammad Mohsin College Chattogram: Admission FormThe Helper SoulNessuna valutazione finora
- Management PriniciplesDocumento87 pagineManagement Priniciplesbusyboy_spNessuna valutazione finora