Potrebbero piacerti anche
- Nonuniformity Correction and Correctability of Ir Fpa Schulz1995Documento15 pagineNonuniformity Correction and Correctability of Ir Fpa Schulz1995sapa3Nessuna valutazione finora
- Schorske Fin de Siècle ViennaDocumento15 pagineSchorske Fin de Siècle Viennasapa30% (1)
- Compressor Elgi DL04012 DT 300Documento30 pagineCompressor Elgi DL04012 DT 300Igor100% (1)
- MCA OU SyllabusDocumento55 pagineMCA OU Syllabusnslchandu100% (1)
- FPAs - and - CMOS Readout Techniques For Infrared Imaging Systems PDFDocumento12 pagineFPAs - and - CMOS Readout Techniques For Infrared Imaging Systems PDFOmkar KatkarNessuna valutazione finora
- Influence of IR Sensor Technology On The Military and Civil DefenseDocumento15 pagineInfluence of IR Sensor Technology On The Military and Civil DefenseXannixNessuna valutazione finora
- 640 X 512 17 M Microbolometer FPA and Sensor DevelopmentDocumento10 pagine640 X 512 17 M Microbolometer FPA and Sensor DevelopmentOmkar KatkarNessuna valutazione finora
- Photon Counting White PaperDocumento12 paginePhoton Counting White PapercasolliNessuna valutazione finora
- Introduction of CCD CircuitDocumento37 pagineIntroduction of CCD CircuitAadityaNessuna valutazione finora
- Multi-Spectral Scene Proj Ection (MSSP) DemonstrationDocumento12 pagineMulti-Spectral Scene Proj Ection (MSSP) Demonstrationbring it onNessuna valutazione finora
- Behind The Light Show in Optical TransceiversDocumento7 pagineBehind The Light Show in Optical TransceiversarmandobroncaNessuna valutazione finora
- Shutter LessDocumento8 pagineShutter LessMahgul khanNessuna valutazione finora
- Cmos Image Sensors - Electronic Camera On A ChipDocumento9 pagineCmos Image Sensors - Electronic Camera On A Chipziko23Nessuna valutazione finora
- Active Pixel Sensors Seminar Report: Harikumar.K. E7B, 16Documento12 pagineActive Pixel Sensors Seminar Report: Harikumar.K. E7B, 16Hari KumarNessuna valutazione finora
- Mems Vibratory Gyroscope ThesisDocumento5 pagineMems Vibratory Gyroscope Thesispatriciaviljoenjackson100% (3)
- Cmos Image SensorsDocumento10 pagineCmos Image Sensorsaleksandar.haNessuna valutazione finora
- Electrical System Inspection Theory and Thermal Signatures of ProblemsDocumento12 pagineElectrical System Inspection Theory and Thermal Signatures of Problemsjide.atolagbe3737Nessuna valutazione finora
- Physics Model DiscriptionDocumento5 paginePhysics Model DiscriptionAbhinav AzadNessuna valutazione finora
- NASA SBIR & STTR Program Homepage - Photonic Integrated Circuits - 2023-01-09Documento4 pagineNASA SBIR & STTR Program Homepage - Photonic Integrated Circuits - 2023-01-09Ujjwal SinghNessuna valutazione finora
- Thesis Cmos Image SensorDocumento8 pagineThesis Cmos Image Sensortamikabrownjackson100% (2)
- Detectors: Ccds For Life-Science ApplicationsDocumento6 pagineDetectors: Ccds For Life-Science ApplicationsgastromonoNessuna valutazione finora
- Waste Management Using Solar Smart Bin: Chandradeep Tiwari Smt. Nagarathna. KDocumento4 pagineWaste Management Using Solar Smart Bin: Chandradeep Tiwari Smt. Nagarathna. KsachNessuna valutazione finora
- Towards Longwave Infrared Tuneable Filters For Multispectral Thermal Imaging ApplicationsDocumento6 pagineTowards Longwave Infrared Tuneable Filters For Multispectral Thermal Imaging ApplicationsAatishImrozNessuna valutazione finora
- Delbruck Funwithasynsensors 2012Documento10 pagineDelbruck Funwithasynsensors 2012ctorreshhNessuna valutazione finora
- Abstract - 1 - : Lead Acid Battery Charger With Voltage Analyzerr Mini Project 2011Documento14 pagineAbstract - 1 - : Lead Acid Battery Charger With Voltage Analyzerr Mini Project 2011Ankit Surya NairNessuna valutazione finora
- Avi Infrared Dataset Generation For People Detection Through Superimposition of Different ICCVW 2021 PaperDocumento10 pagineAvi Infrared Dataset Generation For People Detection Through Superimposition of Different ICCVW 2021 Paperzenon7010Nessuna valutazione finora
- Optoelectronic Sensing System For Tactile SkinDocumento23 pagineOptoelectronic Sensing System For Tactile Skinvipul4792Nessuna valutazione finora
- Applications of Mems in Robotics Using Psoc 5Documento5 pagineApplications of Mems in Robotics Using Psoc 5Sathisha BMNessuna valutazione finora
- The Thermo Scientific iCAP 7000 Plus Series ICP-OES Unique Charge Injection Device (CID) DetectorDocumento4 pagineThe Thermo Scientific iCAP 7000 Plus Series ICP-OES Unique Charge Injection Device (CID) DetectorTak Man TungNessuna valutazione finora
- Infrared Object Position Locator: Oladapo, Opeoluwa AyokunleDocumento44 pagineInfrared Object Position Locator: Oladapo, Opeoluwa Ayokunleoopeoluwa_1Nessuna valutazione finora
- SeekerDocumento8 pagineSeekeralper797Nessuna valutazione finora
- Terahertz Real-Time Imaging Uncooled Array Based On Antenna-And Cavity-Coupled BolometersDocumento12 pagineTerahertz Real-Time Imaging Uncooled Array Based On Antenna-And Cavity-Coupled BolometersakNessuna valutazione finora
- Low-Cost Uncooled Infrared Detector Using Microcantilever Arrays With Optical ReadoutDocumento4 pagineLow-Cost Uncooled Infrared Detector Using Microcantilever Arrays With Optical ReadoutPiz the SciNessuna valutazione finora
- Ijet V3i6p59Documento6 pagineIjet V3i6p59International Journal of Engineering and TechniquesNessuna valutazione finora
- Inspection of Components With The Support of The DronesDocumento6 pagineInspection of Components With The Support of The DronesF. GiacobbeNessuna valutazione finora
- Calibration of Uncooled Thermal Infrared CamerasDocumento11 pagineCalibration of Uncooled Thermal Infrared Camerasing jyaNessuna valutazione finora
- Flat Panel Imaging System For Fluoroscopy Applications: The Dqe (O, MitDocumento12 pagineFlat Panel Imaging System For Fluoroscopy Applications: The Dqe (O, MitLaura NitaNessuna valutazione finora
- Continuous Vibration Monitoring System Using Gaussian Beams and Artificial Neural NetworkDocumento8 pagineContinuous Vibration Monitoring System Using Gaussian Beams and Artificial Neural NetworkAbigor45Nessuna valutazione finora
- About Mems:: What Is MEMS Technology?Documento14 pagineAbout Mems:: What Is MEMS Technology?ashabiaNessuna valutazione finora
- NEOSST2 Paper7Documento6 pagineNEOSST2 Paper7Valeria C. NavarroNessuna valutazione finora
- Radiation Hardening: NAME-Saijal Rekhani ROLL NO-18D110008 BRANCH-MetallurgyDocumento7 pagineRadiation Hardening: NAME-Saijal Rekhani ROLL NO-18D110008 BRANCH-MetallurgySaijal RekhaniNessuna valutazione finora
- Waste Management Using Solar Smart Bin: Chandradeep Tiwari Smt. Nagarathna. KDocumento5 pagineWaste Management Using Solar Smart Bin: Chandradeep Tiwari Smt. Nagarathna. KSagarika VardhanNessuna valutazione finora
- RF Seeker 3d ThalesDocumento13 pagineRF Seeker 3d ThalestttNessuna valutazione finora
- s5 1450 ZervakisDocumento28 pagines5 1450 ZervakisAbyan RaidhNessuna valutazione finora
- Photon Counting White PaperDocumento12 paginePhoton Counting White Paperluc1902Nessuna valutazione finora
- Broadband Picometer-Scale Resolution On-Chip Spectrometer With Reconfigurable PhotonicsDocumento10 pagineBroadband Picometer-Scale Resolution On-Chip Spectrometer With Reconfigurable PhotonicsarashmokhtariNessuna valutazione finora
- First Electro Optical System of The 21st CenturyDocumento8 pagineFirst Electro Optical System of The 21st Centurybring it onNessuna valutazione finora
- Synthetic Aperture Radar System Seminar ReportDocumento19 pagineSynthetic Aperture Radar System Seminar ReportsasankrpNessuna valutazione finora
- SCR-Based ESD Protection Designs For RF ICsDocumento3 pagineSCR-Based ESD Protection Designs For RF ICsjournalNessuna valutazione finora
- (2000) Real - Time - Passive - Millimeter-Wave - Imaging - From - A - Helicopter - PlatformDocumento8 pagine(2000) Real - Time - Passive - Millimeter-Wave - Imaging - From - A - Helicopter - Platformcxcxcxcx QinNessuna valutazione finora
- Laboratories - EPFLDocumento24 pagineLaboratories - EPFLcontact2webNessuna valutazione finora
- 1.-Introduction To Microsystem Fabrication and IntegrationDocumento44 pagine1.-Introduction To Microsystem Fabrication and IntegrationAlexander Martínez PasekNessuna valutazione finora
- Image Fusion For Tactical ApplicationsDocumento11 pagineImage Fusion For Tactical ApplicationsMurat GörükmezNessuna valutazione finora
- Infrared Focal Plane Array TechnologyDocumento20 pagineInfrared Focal Plane Array TechnologybjsimardNessuna valutazione finora
- 04.june 2013 IJEECS p21443Documento6 pagine04.june 2013 IJEECS p21443Mudassir khan MohammedNessuna valutazione finora
- Off. No. 46, 1st Floor, Kadamba Complex Gamma-I, Greater Noida (India) - 201308 Contact UsDocumento7 pagineOff. No. 46, 1st Floor, Kadamba Complex Gamma-I, Greater Noida (India) - 201308 Contact UsSawan AnandNessuna valutazione finora
- Low-Cost Solar Irradiance Meter Using LDR SensorsDocumento8 pagineLow-Cost Solar Irradiance Meter Using LDR SensorsMichelle LlamatumbiNessuna valutazione finora
- Detectors For Missile SeekersDocumento10 pagineDetectors For Missile SeekersAhmed HamoudaNessuna valutazione finora
- Wireless Oscilloscope Using ZigbeeDocumento4 pagineWireless Oscilloscope Using ZigbeemichaelNessuna valutazione finora
- Infrared Technologies For Defence Systems - DRDO DSJDocumento2 pagineInfrared Technologies For Defence Systems - DRDO DSJmercy calloNessuna valutazione finora
- Optical Fault Induction Attacks: Abstract. We Describe A New Class of Attacks On Secure MicrocontrollersDocumento11 pagineOptical Fault Induction Attacks: Abstract. We Describe A New Class of Attacks On Secure MicrocontrollersMossad NewsNessuna valutazione finora
- Hall-Effect Sensors: Theory and ApplicationDa EverandHall-Effect Sensors: Theory and ApplicationValutazione: 5 su 5 stelle5/5 (1)
- New Sensors and Processing ChainDa EverandNew Sensors and Processing ChainJean-Hugh ThomasNessuna valutazione finora
- Python Programming: An Introduction To Computer ScienceDocumento47 paginePython Programming: An Introduction To Computer Sciencesapa3Nessuna valutazione finora
- Explanation of IR EmissivityDocumento2 pagineExplanation of IR Emissivitysapa3Nessuna valutazione finora
- Virtual Server EnvironmentDocumento2 pagineVirtual Server Environmentsapa3Nessuna valutazione finora
- Xcell JournalDocumento116 pagineXcell Journalsapa3Nessuna valutazione finora
- Xcell 46Documento116 pagineXcell 46sapa3Nessuna valutazione finora
- Video Timing ControllerDocumento48 pagineVideo Timing Controllersapa3Nessuna valutazione finora
- Overall Fcb-Ex980s Fcb-Ex980sp Fcb-Ex980 Fcb-Ex980pDocumento1 paginaOverall Fcb-Ex980s Fcb-Ex980sp Fcb-Ex980 Fcb-Ex980psapa3Nessuna valutazione finora
- P ProtocolDocumento2 pagineP Protocolsapa3Nessuna valutazione finora
- Unit 2: Intermediate Hydraulics - 950G Wheel LoaderDocumento45 pagineUnit 2: Intermediate Hydraulics - 950G Wheel LoaderAlha DNessuna valutazione finora
- Change Management in Office 365Documento6 pagineChange Management in Office 365TomNessuna valutazione finora
- Boiling Heat Transfer GuntDocumento39 pagineBoiling Heat Transfer GuntAlyan YousafNessuna valutazione finora
- Global Water 2007 Instrumentation Handbook PDFDocumento204 pagineGlobal Water 2007 Instrumentation Handbook PDFsenthil031277Nessuna valutazione finora
- 3 - Practical Benefit of Risk Assessment-Zone Determination by Layout Analysis PDFDocumento29 pagine3 - Practical Benefit of Risk Assessment-Zone Determination by Layout Analysis PDFrafecar100% (1)
- Wallops Station and The Creation of An American Space ProgramDocumento184 pagineWallops Station and The Creation of An American Space ProgramBob AndrepontNessuna valutazione finora
- Video StandardDocumento3 pagineVideo StandardVarsha SatheNessuna valutazione finora
- Sales EngineerDocumento2 pagineSales EngineerDeborah RyanNessuna valutazione finora
- Service Bulletin: Firmware Upgrade (Upgrade Pack Ver. V1.02) FS-6030MFP, FS-6025MFP, FS-6025MFP/BDocumento1 paginaService Bulletin: Firmware Upgrade (Upgrade Pack Ver. V1.02) FS-6030MFP, FS-6025MFP, FS-6025MFP/Bdorcelli1234Nessuna valutazione finora
- Day-1 - Part-1 - TOGAF - IntroductionDocumento35 pagineDay-1 - Part-1 - TOGAF - IntroductionTrishitoNessuna valutazione finora
- Factory Simulation Software System: Software Requirements Specification (SRS)Documento24 pagineFactory Simulation Software System: Software Requirements Specification (SRS)Majety S LskshmiNessuna valutazione finora
- Tech Guide: PC LAN Setup: XP Operating SystemsDocumento3 pagineTech Guide: PC LAN Setup: XP Operating SystemsRobinson SanchezNessuna valutazione finora
- Folder Geral Grupo Tormene (En)Documento9 pagineFolder Geral Grupo Tormene (En)Douglas HayashiNessuna valutazione finora
- B85M-HDS multiQIG PDFDocumento57 pagineB85M-HDS multiQIG PDFAndreas AndreouNessuna valutazione finora
- KUWAITDocumento3 pagineKUWAITarvin4dNessuna valutazione finora
- Java Lab ManualDocumento61 pagineJava Lab ManualManas TripathyNessuna valutazione finora
- LogDocumento176 pagineLogCristianeeuuNessuna valutazione finora
- Fujitsu Celvin® Nas Q902 Storage: Data SheetDocumento7 pagineFujitsu Celvin® Nas Q902 Storage: Data SheetmuaadhNessuna valutazione finora
- Manual VRRP MikrotikDocumento29 pagineManual VRRP Mikrotikusopen0Nessuna valutazione finora
- Customer Part No. Ar32564RDocumento2 pagineCustomer Part No. Ar32564Rjohnny sabinNessuna valutazione finora
- My Motivation To Apply To The Masters of Electrical Engineering Program - (Essay Example), 392 Words GradesFixerDocumento2 pagineMy Motivation To Apply To The Masters of Electrical Engineering Program - (Essay Example), 392 Words GradesFixerIlyes BenchehidaNessuna valutazione finora
- Dwnload Full Visual C 2012 How To Program 5th Edition Deitel Test Bank PDFDocumento35 pagineDwnload Full Visual C 2012 How To Program 5th Edition Deitel Test Bank PDFresigner.nudicaul7k1p3100% (8)
- ZB MG-ZigBee Network Layer Technical OverviewDocumento26 pagineZB MG-ZigBee Network Layer Technical Overviewuraza20014154Nessuna valutazione finora
- Bits of Unicode: Data Structures For ADocumento36 pagineBits of Unicode: Data Structures For Aplakal+scribdNessuna valutazione finora
- CSE3099-TARP: Automated E-Mail Reply by Chatbot Using Pytorch (Neural Networks)Documento24 pagineCSE3099-TARP: Automated E-Mail Reply by Chatbot Using Pytorch (Neural Networks)Subarna LamsalNessuna valutazione finora
- Hua Chi QuanDocumento1 paginaHua Chi QuanHứa Chí QuânNessuna valutazione finora
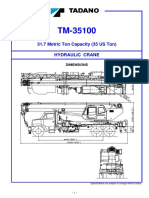
- TM 35100 TM-35100: 31.7 Metric Ton Capacity (35 US Ton) Hydraulic CraneDocumento11 pagineTM 35100 TM-35100: 31.7 Metric Ton Capacity (35 US Ton) Hydraulic CraneEder Rodriguez GonzalezNessuna valutazione finora
- As 60947.2-2005 Low-Voltage Switchgear and Controlgear Circuit-BreakersDocumento8 pagineAs 60947.2-2005 Low-Voltage Switchgear and Controlgear Circuit-BreakersSAI Global - APACNessuna valutazione finora