Potrebbero piacerti anche
- Jeti Telemetry ProtocolDocumento8 pagineJeti Telemetry ProtocolAsniex NilNessuna valutazione finora
- Z3 2 4Documento104 pagineZ3 2 4Vu Duc Hoan100% (1)
- Lecture 08Documento12 pagineLecture 08MuhammadHafizhNessuna valutazione finora
- Isdn - Integrated Services Digital NetworkDocumento6 pagineIsdn - Integrated Services Digital NetworkTrần Ngọc LâmNessuna valutazione finora
- Netlinx Integrated Controller: Ni-3000 Specifications (Cont.)Documento2 pagineNetlinx Integrated Controller: Ni-3000 Specifications (Cont.)Chacoroot NullNessuna valutazione finora
- A Guide To Rs-232 Communication - FXDocumento35 pagineA Guide To Rs-232 Communication - FXTetsusaigaNessuna valutazione finora
- Peripheral Interfacing + Coding: Lets Learn How To Do It in 8051 !!Documento44 paginePeripheral Interfacing + Coding: Lets Learn How To Do It in 8051 !!malhiavtarsinghNessuna valutazione finora
- Smart Sensor Integration With A Wired Network: Darold WobschallDocumento19 pagineSmart Sensor Integration With A Wired Network: Darold Wobschallschauhan119877Nessuna valutazione finora
- 1142 NEC DatfasheetDocumento8 pagine1142 NEC DatfasheetAjay Bhalerao100% (1)
- What Is SimulinkDocumento12 pagineWhat Is SimulinkSaiful IslamNessuna valutazione finora
- Serial Communication Protocol:: Data Bit Communication Channel Computer Bus Parallel CommunicationDocumento24 pagineSerial Communication Protocol:: Data Bit Communication Channel Computer Bus Parallel CommunicationAshalatha MadasuNessuna valutazione finora
- Metcom T E - enDocumento10 pagineMetcom T E - enJC AlemanNessuna valutazione finora
- Avc LanDocumento9 pagineAvc LanPedro BravoNessuna valutazione finora
- Control Electrical Appliances Using PCDocumento34 pagineControl Electrical Appliances Using PCZeeshanKhalidNessuna valutazione finora
- Data Communication and Networking (Lab Manual)Documento62 pagineData Communication and Networking (Lab Manual)Abhishek Pattanaik100% (1)
- Eb355 80 4Documento44 pagineEb355 80 4David CochlinNessuna valutazione finora
- PC Interfacing Fourth Level Lecture Three: Serial (RS232) Port InterfaceDocumento9 paginePC Interfacing Fourth Level Lecture Three: Serial (RS232) Port Interfaceأسامة المياحيNessuna valutazione finora
- PC Serial Port (RS-232 DE9) Pinout and Wiring @Documento4 paginePC Serial Port (RS-232 DE9) Pinout and Wiring @Vaneet Gupta100% (2)
- Chip Neuron Lonworks PDFDocumento19 pagineChip Neuron Lonworks PDFCesar PalaciosNessuna valutazione finora
- Rappel Standard 3.40 3.48 SMPPDocumento14 pagineRappel Standard 3.40 3.48 SMPPAlejandro Cossio100% (1)
- T1 TroubleshootingDocumento29 pagineT1 TroubleshootingRajat DhamaNessuna valutazione finora
- T BOX ManualDocumento26 pagineT BOX ManualVlady TeoNessuna valutazione finora
- Data Communication and Computer NetworksDocumento105 pagineData Communication and Computer NetworksTalha HashmiNessuna valutazione finora
- Xport TCP IpDocumento5 pagineXport TCP IpKarthick Vijayan100% (1)
- GJGHJGDocumento4 pagineGJGHJGs_singh321Nessuna valutazione finora
- RS232 InterfaceDocumento3 pagineRS232 Interfacevairam81Nessuna valutazione finora
- RTU560CID11Documento15 pagineRTU560CID11Ly HàNessuna valutazione finora
- 11 Unit09 Bluetooth PDFDocumento44 pagine11 Unit09 Bluetooth PDFDhudy PolanunuNessuna valutazione finora
- Nivelco - EviewDocumento8 pagineNivelco - EviewMaciel de PaulaNessuna valutazione finora
- Hardware Protocol and Timing Diagram: SolutionsDocumento5 pagineHardware Protocol and Timing Diagram: SolutionsRohini JosephNessuna valutazione finora
- Wireless Gas Monitor With IEEE 1451 ProtocolDocumento4 pagineWireless Gas Monitor With IEEE 1451 Protocoldarshan jNessuna valutazione finora
- Embedded Systems Lab04 USARTDocumento12 pagineEmbedded Systems Lab04 USARTAimanNessuna valutazione finora
- Bidirectional Visitor CounterDocumento17 pagineBidirectional Visitor CounterPankaj KumarNessuna valutazione finora
- 8051 CoomunicationDocumento93 pagine8051 CoomunicationjaigodaraNessuna valutazione finora
- Using Packet Tracer 2Documento58 pagineUsing Packet Tracer 2Mahbubur RahmanNessuna valutazione finora
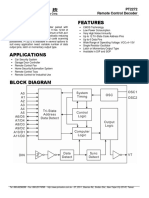
- PT2272Documento18 paginePT2272Ahmad FahmiNessuna valutazione finora
- PM591 EthDocumento15 paginePM591 EthIsaac Costa100% (1)
- BlueControl DatasheetDocumento3 pagineBlueControl DatasheetSiti Nikmatilah100% (1)
- Microcontroller Basics and ProgrammingDocumento92 pagineMicrocontroller Basics and ProgrammingVishal Gudla NagrajNessuna valutazione finora
- Input Output Port and InterfacingDocumento44 pagineInput Output Port and Interfacingsk087510100% (1)
- WWW Circuitstoday Com 8051 MicrocontrollerDocumento22 pagineWWW Circuitstoday Com 8051 MicrocontrollerSatya BoseNessuna valutazione finora
- Q4Documento4 pagineQ4Ritesh SharmaNessuna valutazione finora
- LTE - PRACH DetectionDocumento12 pagineLTE - PRACH DetectionAshish ShuklaNessuna valutazione finora
- Serial Port Communication in LabVIEWDocumento5 pagineSerial Port Communication in LabVIEWDecker JamesNessuna valutazione finora
- RS232Documento26 pagineRS232Pratesh Kumar Reddy100% (3)
- Report On Digital Switching SystemDocumento20 pagineReport On Digital Switching SystemKurban UbulNessuna valutazione finora
- Major Project PPT SCH No 83,84,91,106.Documento30 pagineMajor Project PPT SCH No 83,84,91,106.RJ RoxXNessuna valutazione finora
- Read Me Slave 2.1Documento7 pagineRead Me Slave 2.1Prasad VylaleNessuna valutazione finora
- FIBER OCEAN Lithium Battery BMS Communication ProtocolDocumento30 pagineFIBER OCEAN Lithium Battery BMS Communication ProtocolpetermamdouhraoufNessuna valutazione finora
- Flexy Multiradio - Descripción de TarjetasDocumento8 pagineFlexy Multiradio - Descripción de TarjetasAngel ChinchayNessuna valutazione finora
- Dac Interface To 8051 PDFDocumento4 pagineDac Interface To 8051 PDFRAVI100% (1)
- ISeries Instruments Addendum 104633-00 16aug2012Documento98 pagineISeries Instruments Addendum 104633-00 16aug2012Thanh Luan NguyenNessuna valutazione finora
- RTU511Documento9 pagineRTU511Sambit MohapatraNessuna valutazione finora
- EtherMPX User Manual v3 (Rev1.2)Documento21 pagineEtherMPX User Manual v3 (Rev1.2)papaki_grNessuna valutazione finora
- 10 DevicesDocumento34 pagine10 DevicesFeroz ShaikNessuna valutazione finora
- TPS13-010 Rev1.0 B5 Quick Installation GuideDocumento17 pagineTPS13-010 Rev1.0 B5 Quick Installation GuideabdirahmanNessuna valutazione finora
- Major Project PPT by JoshiDocumento20 pagineMajor Project PPT by JoshiAman RathoreNessuna valutazione finora
- Mobile Digital Datalink For Field Work ApplicationsDocumento4 pagineMobile Digital Datalink For Field Work ApplicationsMatthew CarterNessuna valutazione finora
- Radio Shack TRS-80 Expansion Interface: Operator's Manual: Catalog Numbers: 26-1140, 26-1141, 26-1142Da EverandRadio Shack TRS-80 Expansion Interface: Operator's Manual: Catalog Numbers: 26-1140, 26-1141, 26-1142Nessuna valutazione finora
- Exploring Arduino: Tools and Techniques for Engineering WizardryDa EverandExploring Arduino: Tools and Techniques for Engineering WizardryValutazione: 4.5 su 5 stelle4.5/5 (5)
- Sample Ballot (North Carolina 2016)Documento2 pagineSample Ballot (North Carolina 2016)pratik2000Nessuna valutazione finora
- Problem 2-2A: InstructionsDocumento6 pagineProblem 2-2A: Instructionspratik2000Nessuna valutazione finora
- Sin 2. Sin: Sine and Cosine Values - OF1Documento1 paginaSin 2. Sin: Sine and Cosine Values - OF1pratik2000Nessuna valutazione finora
- Practice: No Calculator!! 1. Prove The Identity: 2. Simplify The ExpressionDocumento3 paginePractice: No Calculator!! 1. Prove The Identity: 2. Simplify The Expressionpratik2000Nessuna valutazione finora
- Communication Modules SITRANS F M MAG 8000Documento81 pagineCommunication Modules SITRANS F M MAG 8000Martin AlbertoNessuna valutazione finora
- Pre-Calc. Assignment List Chapter 6: Section/Page Problems Notes/Changes 6.1 (2 Days)Documento1 paginaPre-Calc. Assignment List Chapter 6: Section/Page Problems Notes/Changes 6.1 (2 Days)pratik2000Nessuna valutazione finora
- NEMA Enclosure Types 11-05-2Documento9 pagineNEMA Enclosure Types 11-05-2Duron SaavedraNessuna valutazione finora
- HBS750 LG Tone Pro Manual EngDocumento19 pagineHBS750 LG Tone Pro Manual EngWaheedAhmedNessuna valutazione finora
- Circuit Breaker SelectionDocumento16 pagineCircuit Breaker SelectionCinar Inal100% (3)
- Copper For Busbars All SectionsDocumento108 pagineCopper For Busbars All Sectionssusanto_andri_2005Nessuna valutazione finora
- JointingDocumento13 pagineJointingengazshamsNessuna valutazione finora
- Bitdefender AntivirusDocumento4 pagineBitdefender AntivirusMohd Jamil PatahNessuna valutazione finora
- Estatement-202310 20240118082918Documento3 pagineEstatement-202310 20240118082918jooamir70Nessuna valutazione finora
- Sample Cover Letter For Job ApplicationDocumento5 pagineSample Cover Letter For Job ApplicationFierdzz XieeraNessuna valutazione finora
- BTS Installation GuidelineDocumento74 pagineBTS Installation Guidelinekhalis@hotmail.comNessuna valutazione finora
- Certificate: of ConformityDocumento3 pagineCertificate: of ConformityGerson SouzaNessuna valutazione finora
- Service Manual SM-5300: PC Scale Printer Edition 1Documento132 pagineService Manual SM-5300: PC Scale Printer Edition 1Kevin ASR100% (2)
- HP 6220 6050a0066801-Mb-A02 SchematicsDocumento68 pagineHP 6220 6050a0066801-Mb-A02 SchematicsGerman ValenciaNessuna valutazione finora
- So NetDocumento110 pagineSo NetRaj_Jai03Nessuna valutazione finora
- ECE 3113 - Introduction To RF Circuit DesignDocumento5 pagineECE 3113 - Introduction To RF Circuit DesignSrinivas KaratlapelliNessuna valutazione finora
- GT Docs (Consolidated) To Mar 4Documento911 pagineGT Docs (Consolidated) To Mar 4mbNessuna valutazione finora
- Dynamic Microphones : IndexDocumento6 pagineDynamic Microphones : IndexJuan Gabriel NiñoNessuna valutazione finora
- Factory Performance Testing of Vertical Turbine PumpsDocumento3 pagineFactory Performance Testing of Vertical Turbine PumpsSrećko BlaževićNessuna valutazione finora
- PPMappDocumento14 paginePPMappUmida MukumovaNessuna valutazione finora
- CMN OIL FREE COMPRESSOR - CompressedDocumento4 pagineCMN OIL FREE COMPRESSOR - CompressedAriantoNessuna valutazione finora
- LG 49UF7700 Chassis LJ53JDocumento119 pagineLG 49UF7700 Chassis LJ53Jleonardogustavoc100% (1)
- Portable Smart Phone Charger Using HumanDocumento6 paginePortable Smart Phone Charger Using HumanKipkoech FrankNessuna valutazione finora
- Department of Technical EducationDocumento2 pagineDepartment of Technical Educationraghgk2012Nessuna valutazione finora
- SBO Solution BriefDocumento4 pagineSBO Solution BriefroyshahanaNessuna valutazione finora
- Att Bill 2020Documento6 pagineAtt Bill 2020CARMEN HULTZNessuna valutazione finora
- Rycom Model 3121B, 3126B, 3132 Selective Levelmeter Instruction & Maintenance Manual, March 1972.Documento67 pagineRycom Model 3121B, 3126B, 3132 Selective Levelmeter Instruction & Maintenance Manual, March 1972.Bob Laughlin, KWØRLNessuna valutazione finora
- Nav1 Aplan2Documento4 pagineNav1 Aplan2Jemar lucidoNessuna valutazione finora
- EK Gladiator 80 Spec SheetDocumento1 paginaEK Gladiator 80 Spec SheetRafael JimenezNessuna valutazione finora
- (KEHUA) - Manual Do Usuário - Energy Cloud ENDocumento78 pagine(KEHUA) - Manual Do Usuário - Energy Cloud ENsuporte.sankosNessuna valutazione finora
- Cat Forklift v160b Operation Maintenance ManualDocumento9 pagineCat Forklift v160b Operation Maintenance Manualxycedfsf100% (34)
- Scala Rider Q1 Owner ManualDocumento16 pagineScala Rider Q1 Owner ManualFabio GalloNessuna valutazione finora
- Dime Amp 2011Documento4 pagineDime Amp 2011Junior MilbradtNessuna valutazione finora
- Syahrir Nasser ResumeDocumento5 pagineSyahrir Nasser Resumeammank81Nessuna valutazione finora
- Java MCQ QuestionsDocumento11 pagineJava MCQ QuestionsPineappleNessuna valutazione finora
- Chint Pricelist 2023Documento108 pagineChint Pricelist 2023SK EnterprisesNessuna valutazione finora
- Module 2Documento13 pagineModule 2PHEBE CIASNessuna valutazione finora