Potrebbero piacerti anche
- IT6000E Technical ManualDocumento72 pagineIT6000E Technical ManuallquickfallNessuna valutazione finora
- WDMS User Manual V3.0Documento39 pagineWDMS User Manual V3.0johnNessuna valutazione finora
- Technical Manual of SP Series V2.0Documento159 pagineTechnical Manual of SP Series V2.0Renzo GonzalezNessuna valutazione finora
- RoverC2 NewEdition Manual enDocumento62 pagineRoverC2 NewEdition Manual enAoolf ManNessuna valutazione finora
- Installation Manual ACRD301Documento100 pagineInstallation Manual ACRD301robinssonNessuna valutazione finora
- Manuel Chase GPR4433 Ug 0710-400-ADocumento96 pagineManuel Chase GPR4433 Ug 0710-400-Abilou570% (2)
- Waf BOOKDocumento123 pagineWaf BOOKAymen DawoodNessuna valutazione finora
- LATEST ComputerDocumento111 pagineLATEST Computerbrosonzogo9565100% (1)
- LCD Monitor E2209WF SchematicDocumento51 pagineLCD Monitor E2209WF SchematicwatteaucarNessuna valutazione finora
- A6 Plus Series Anthos Operation ManualDocumento100 pagineA6 Plus Series Anthos Operation ManualsayedNessuna valutazione finora
- Diaper Inspection System: Application Manual Proinspect 3Documento54 pagineDiaper Inspection System: Application Manual Proinspect 3Abdou DE100% (2)
- Manual BUC Agilis 80 - 100 - 200WDocumento108 pagineManual BUC Agilis 80 - 100 - 200WXandrey Xiveras100% (1)
- TD Helios r5b EngDocumento44 pagineTD Helios r5b EngtiagoNessuna valutazione finora
- Formax 6306 Operator ManualDocumento62 pagineFormax 6306 Operator Manualsatx840Nessuna valutazione finora
- #1service Manual - Modular Air-Cooled Screw ChillersDocumento107 pagine#1service Manual - Modular Air-Cooled Screw ChillersBeng RosalesNessuna valutazione finora
- Instruction Manual: ESG1 Series ControllerDocumento83 pagineInstruction Manual: ESG1 Series ControllerluislunarNessuna valutazione finora
- TheDocumento66 pagineTheHuy KiềuNessuna valutazione finora
- Sunsystems - 6.4.x Financials AdministrationDocumento400 pagineSunsystems - 6.4.x Financials Administrationeverboqaileh mohNessuna valutazione finora
- SeidelDocumento42 pagineSeidelAxel HernandezNessuna valutazione finora
- Gen 5 SoftwareDocumento452 pagineGen 5 Softwareابو حمزةNessuna valutazione finora
- Application Manual Integrated Dispensing Function Package (IDFP) 3HDAK00000A0252-001Documento700 pagineApplication Manual Integrated Dispensing Function Package (IDFP) 3HDAK00000A0252-001JAIR RODRIGUEZ100% (1)
- IRC5-MultiMove Application Manual 3HAC021272-001 - RevBDocumento116 pagineIRC5-MultiMove Application Manual 3HAC021272-001 - RevBmartinimartiiniNessuna valutazione finora
- Change Auditor Student Lab ManualDocumento83 pagineChange Auditor Student Lab ManualMoha'd AshourNessuna valutazione finora
- Dse3210 ManualDocumento32 pagineDse3210 Manualabuzer1981Nessuna valutazione finora
- Nellcor NPB-195 - Service ManualDocumento98 pagineNellcor NPB-195 - Service ManualNuha Makeem100% (1)
- (Edau12-722) Super Multi NX, R410a, (3mxs-Evma, Ftxs-Evma)Documento428 pagine(Edau12-722) Super Multi NX, R410a, (3mxs-Evma, Ftxs-Evma)Phanhai KakaNessuna valutazione finora
- Ge Fanuc Automation: Powermotion™ ProductsDocumento778 pagineGe Fanuc Automation: Powermotion™ ProductsРоман ТуровскийNessuna valutazione finora
- p3t32 en M I006 Iec WebDocumento420 paginep3t32 en M I006 Iec WebErnesto A. WeiszNessuna valutazione finora
- PBK5 User Manual PDFDocumento23 paginePBK5 User Manual PDFClaudio CastilloNessuna valutazione finora
- MELSEC iQ-R Structured Text (ST) Programming Guide BookDocumento106 pagineMELSEC iQ-R Structured Text (ST) Programming Guide BookyounesNessuna valutazione finora
- Triple 7s Field Service Mpu6 Base Manual 2 2 1Documento96 pagineTriple 7s Field Service Mpu6 Base Manual 2 2 1Charlotte SpainNessuna valutazione finora
- SafetyNet Logic Workbench Getting Started GuideDocumento103 pagineSafetyNet Logic Workbench Getting Started GuideRekik MHNessuna valutazione finora
- CONTEC8000S英文正文140430Documento60 pagineCONTEC8000S英文正文140430Lucy Fernanda MillanNessuna valutazione finora
- cs8c CONTROLADORDocumento248 paginecs8c CONTROLADORipmcmtyNessuna valutazione finora
- Wipro 7b1630 User Manuel EnglishDocumento70 pagineWipro 7b1630 User Manuel Englishsujata1972Nessuna valutazione finora
- Assembly and Operating Instructions For S-ClassDocumento40 pagineAssembly and Operating Instructions For S-ClassPaulmankeNessuna valutazione finora
- 3BSE020926-510 - en S800 I O Fieldbus Communication Interface For PROFIBUS DP DPV1Documento130 pagine3BSE020926-510 - en S800 I O Fieldbus Communication Interface For PROFIBUS DP DPV1jhuskanovicNessuna valutazione finora
- 1250 DG - IndexDocumento139 pagine1250 DG - IndexAstrid Navarro Jarquín100% (1)
- Certifier 7.3 ReferenceGuideDocumento154 pagineCertifier 7.3 ReferenceGuide彭仕安Nessuna valutazione finora
- Ewt 655 WNDocumento28 pagineEwt 655 WNMuhammad RafkiNessuna valutazione finora
- FCT030 Modbus FW4 FM en-USDocumento198 pagineFCT030 Modbus FW4 FM en-USblackcdeNessuna valutazione finora
- Industrial Working ReportDocumento47 pagineIndustrial Working ReportAbdul Rehman100% (1)
- 66 1100 035-1 SafeLink For WindowsDocumento39 pagine66 1100 035-1 SafeLink For WindowsAnonymous MwulYRw2LNessuna valutazione finora
- 3BSE036904-510 A en System 800xa Operations 5.1Documento284 pagine3BSE036904-510 A en System 800xa Operations 5.1Nguyễn Anh TúNessuna valutazione finora
- Ecotec Installation and Servicing Manual 261417Documento88 pagineEcotec Installation and Servicing Manual 261417adrgrNessuna valutazione finora
- Classic 321gl Operating Manual enDocumento23 pagineClassic 321gl Operating Manual enNicolae JulaNessuna valutazione finora
- TestDocumento207 pagineTestBogdan ChiriacNessuna valutazione finora
- Racks Ventilados Tecniplast BlueLineDocumento81 pagineRacks Ventilados Tecniplast BlueLinepablo elviraNessuna valutazione finora
- Diplexer For UHF Military Applications (Master's Thesis)Documento76 pagineDiplexer For UHF Military Applications (Master's Thesis)wearoleNessuna valutazione finora
- SR-1000 User's Manual - EDocumento92 pagineSR-1000 User's Manual - ECarlos MusellaNessuna valutazione finora
- OfficialManualOCA 203 EDocumento122 pagineOfficialManualOCA 203 ETiffany RusNessuna valutazione finora
- Patient Health CareDocumento65 paginePatient Health Carehamed raza100% (1)
- 3BSE036351-600 - en AC 800M 6.0 Controller HardwareDocumento472 pagine3BSE036351-600 - en AC 800M 6.0 Controller HardwarewilfredoNessuna valutazione finora
- Operating Instructions For Actuators Type AB: OM-ENGLISH-AB-V2.05-2017.06.28Documento21 pagineOperating Instructions For Actuators Type AB: OM-ENGLISH-AB-V2.05-2017.06.28Nikhil AggarwalNessuna valutazione finora
- CnMaestro 2.2.1 RESTful API - 15-Jul-19Documento75 pagineCnMaestro 2.2.1 RESTful API - 15-Jul-19СергейСоханёвNessuna valutazione finora
- FC901 Manual - Dec 23 2011Documento81 pagineFC901 Manual - Dec 23 2011Pariah1977100% (1)
- Precor P80 Service ManualDocumento126 paginePrecor P80 Service Manualmv_gear50% (2)
- 3BSE030340-510 en 800xa For AM 5.1 ConfigurationDocumento288 pagine3BSE030340-510 en 800xa For AM 5.1 ConfigurationMustaffa.waadNessuna valutazione finora
- 7SR210 IEC61850 ManualDocumento120 pagine7SR210 IEC61850 Manualdiego ojedaNessuna valutazione finora
- ABB Manual PDFDocumento65 pagineABB Manual PDFgurmeet singhNessuna valutazione finora
- L8 Logistics ManagementDocumento41 pagineL8 Logistics ManagementShahmien SevenNessuna valutazione finora
- 34-Samss-718 (12-02-2015)Documento14 pagine34-Samss-718 (12-02-2015)Mubin100% (1)
- QuickRide LogcatDocumento53 pagineQuickRide LogcatAthira OSNessuna valutazione finora
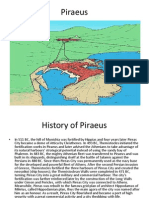
- PiraeusDocumento9 paginePiraeusBen JamesNessuna valutazione finora
- Murugan Temple of North America: Ahkpuf F Gankd - FZGJP JizDocumento8 pagineMurugan Temple of North America: Ahkpuf F Gankd - FZGJP JizOurMuruganTempleNessuna valutazione finora
- Financial Ratio Analysis FormulasDocumento4 pagineFinancial Ratio Analysis FormulasVaishali Jhaveri100% (1)
- Iata 2008 - Annex ADocumento11 pagineIata 2008 - Annex Agurungbhim100% (1)
- Yesenia Acc SjournalsDocumento7 pagineYesenia Acc SjournalsFileon ChiacNessuna valutazione finora
- ABSTRACT (CG To Epichlorohydrin)Documento5 pagineABSTRACT (CG To Epichlorohydrin)Amiel DionisioNessuna valutazione finora
- CS8792 CNS Unit5Documento17 pagineCS8792 CNS Unit5024CSE DHARSHINI.ANessuna valutazione finora
- SK Memorandum of AgreementDocumento3 pagineSK Memorandum of AgreementNORZEN LAGURANessuna valutazione finora
- Periodical Increment CertificateDocumento1 paginaPeriodical Increment CertificateMD.khalil100% (1)
- Research Paper About Charter ChangeDocumento5 pagineResearch Paper About Charter Changegz46ktxrNessuna valutazione finora
- Complaint - Burhans & Rivera v. State of New York PDFDocumento34 pagineComplaint - Burhans & Rivera v. State of New York PDFpospislawNessuna valutazione finora
- Mike She Printed v1Documento370 pagineMike She Printed v1Grigoras MihaiNessuna valutazione finora
- EXHIBIT 071 (B) - Clearfield Doctrine in Full ForceDocumento4 pagineEXHIBIT 071 (B) - Clearfield Doctrine in Full ForceAnthea100% (2)
- Maxiim Vehicle Diagnostic ReportDocumento3 pagineMaxiim Vehicle Diagnostic ReportCarlos Cobaleda GarcíaNessuna valutazione finora
- JD Data Analyst CapgeminiDocumento2 pagineJD Data Analyst CapgeminiShivansh KansalNessuna valutazione finora
- Fault Tree AnalysisDocumento23 pagineFault Tree Analysiskenoly123Nessuna valutazione finora
- Electrical Engineering: Scheme of Undergraduate Degree CourseDocumento2 pagineElectrical Engineering: Scheme of Undergraduate Degree CourseSuresh JainNessuna valutazione finora
- Thoughts On Iphone Demand - Update On Delivery Times, Carrier IncentivesDocumento10 pagineThoughts On Iphone Demand - Update On Delivery Times, Carrier Incentivesalpha123@tutopiaNessuna valutazione finora
- Avamar Backup Clients User Guide 19.3Documento86 pagineAvamar Backup Clients User Guide 19.3manish.puri.gcpNessuna valutazione finora
- Conscious Parallelism and Price Fixing Defining The BoundaryDocumento29 pagineConscious Parallelism and Price Fixing Defining The BoundaryFelipe Augusto Diaz SuazaNessuna valutazione finora
- Lesson 2. WHAT IS AGROTECHNOPRENEURSHIPDocumento23 pagineLesson 2. WHAT IS AGROTECHNOPRENEURSHIPRhea Jane DugadugaNessuna valutazione finora
- Civil Procedure Flash CardsDocumento48 pagineCivil Procedure Flash CardsNick Ashjian100% (1)
- in The Matter of The Estate of Remigia SaguinsinDocumento3 paginein The Matter of The Estate of Remigia SaguinsinAila AmpieNessuna valutazione finora
- JKBMS Tutorial SetupDocumento7 pagineJKBMS Tutorial SetupFabricio Varovsky Muñiz ArteagaNessuna valutazione finora
- Queue Using Linked ListDocumento2 pagineQueue Using Linked ListHassan ZiaNessuna valutazione finora
- FINA 3780 Chapter 6Documento33 pagineFINA 3780 Chapter 6roBinNessuna valutazione finora
- DLL Sci 10 12-09-2022Documento3 pagineDLL Sci 10 12-09-2022Lovely Shiena Cain AragoncilloNessuna valutazione finora
- Chip War: The Quest to Dominate the World's Most Critical TechnologyDa EverandChip War: The Quest to Dominate the World's Most Critical TechnologyValutazione: 4.5 su 5 stelle4.5/5 (227)
- Unlock Any Roku Device: Watch Shows, TV, & Download AppsDa EverandUnlock Any Roku Device: Watch Shows, TV, & Download AppsNessuna valutazione finora
- Chip War: The Fight for the World's Most Critical TechnologyDa EverandChip War: The Fight for the World's Most Critical TechnologyValutazione: 4.5 su 5 stelle4.5/5 (82)
- iPhone 15 Pro User Guide for Beginners and SeniorsDa EverandiPhone 15 Pro User Guide for Beginners and SeniorsNessuna valutazione finora
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsDa EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsValutazione: 5 su 5 stelle5/5 (2)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Da EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Valutazione: 5 su 5 stelle5/5 (2)
- CompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)Da EverandCompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)Valutazione: 5 su 5 stelle5/5 (1)
- iPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Da EverandiPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Valutazione: 5 su 5 stelle5/5 (2)
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XDa EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XValutazione: 3 su 5 stelle3/5 (2)
- How to Jailbreak Roku: Unlock Roku, Roku Stick, Roku Ultra, Roku Express, Roku TV with Kodi Step by Step GuideDa EverandHow to Jailbreak Roku: Unlock Roku, Roku Stick, Roku Ultra, Roku Express, Roku TV with Kodi Step by Step GuideValutazione: 1 su 5 stelle1/5 (1)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Da EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Valutazione: 5 su 5 stelle5/5 (1)
- Computer Science: A Concise IntroductionDa EverandComputer Science: A Concise IntroductionValutazione: 4.5 su 5 stelle4.5/5 (14)
- Amazon Web Services (AWS) Interview Questions and AnswersDa EverandAmazon Web Services (AWS) Interview Questions and AnswersValutazione: 4.5 su 5 stelle4.5/5 (3)
- Programming with STM32: Getting Started with the Nucleo Board and C/C++Da EverandProgramming with STM32: Getting Started with the Nucleo Board and C/C++Valutazione: 3.5 su 5 stelle3.5/5 (3)
- Hacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxDa EverandHacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxNessuna valutazione finora
- iWoz: How I Invented the Personal Computer and Had Fun Along the WayDa EverandiWoz: How I Invented the Personal Computer and Had Fun Along the WayValutazione: 3.5 su 5 stelle3.5/5 (317)
- Raspberry Pi for Python Programmers Cookbook - Second EditionDa EverandRaspberry Pi for Python Programmers Cookbook - Second EditionNessuna valutazione finora
- Mastering IoT For Industrial Environments: Unlock the IoT Landscape for Industrial Environments with Industry 4.0, Covering Architecture, Protocols like MQTT, and Advancements with ESP-IDFDa EverandMastering IoT For Industrial Environments: Unlock the IoT Landscape for Industrial Environments with Industry 4.0, Covering Architecture, Protocols like MQTT, and Advancements with ESP-IDFNessuna valutazione finora
- Windows 10 Mastery: The Complete User Guide to Learn Windows 10 from Beginner to ExpertDa EverandWindows 10 Mastery: The Complete User Guide to Learn Windows 10 from Beginner to ExpertValutazione: 3.5 su 5 stelle3.5/5 (6)
- Amazon Echo Manual Guide : Top 30 Hacks And Secrets To Master Amazon Echo & Alexa For Beginners: The Blokehead Success SeriesDa EverandAmazon Echo Manual Guide : Top 30 Hacks And Secrets To Master Amazon Echo & Alexa For Beginners: The Blokehead Success SeriesNessuna valutazione finora