Potrebbero piacerti anche
- College Algebra Quick Reference Sheet GuideDocumento2 pagineCollege Algebra Quick Reference Sheet Guidetxungo100% (1)
- Flight Direction Cosine MatrixDocumento11 pagineFlight Direction Cosine MatrixsazradNessuna valutazione finora
- Principles of CAD CAM CAEDocumento600 paginePrinciples of CAD CAM CAEBob Benedict0% (1)
- Simplest Rectangular ElementDocumento14 pagineSimplest Rectangular ElementM.Saravana Kumar..M.ENessuna valutazione finora
- Unit-2 - Representation of Curve and SurfacesDocumento45 pagineUnit-2 - Representation of Curve and SurfacesSreehari Nambiar KTNessuna valutazione finora
- DQZ transformation simplifies 3-phase circuit analysisDocumento48 pagineDQZ transformation simplifies 3-phase circuit analysisAnonymous tpVfikO26Nessuna valutazione finora
- CG Chapter 5Documento15 pagineCG Chapter 5rajmaisuria111Nessuna valutazione finora
- 1 - Mohsin EM Lecture 3,4Documento69 pagine1 - Mohsin EM Lecture 3,4UsamaNessuna valutazione finora
- Computer Graphics Using Open GL, 3 Edition F. S. Hill, Jr. and S. KelleyDocumento49 pagineComputer Graphics Using Open GL, 3 Edition F. S. Hill, Jr. and S. KelleyAbrahamNessuna valutazione finora
- Image registration establishes correspondence between related image pairsDocumento56 pagineImage registration establishes correspondence between related image pairsDeepti ChaudharyNessuna valutazione finora
- Mechanical Systems Transfer FunctionDocumento17 pagineMechanical Systems Transfer FunctionTalha JalilNessuna valutazione finora
- Matrices TransformationDocumento44 pagineMatrices Transformationkarthikesan48Nessuna valutazione finora
- NPTEL Complex Analysis Course on Conformal Mapping Special TransformationsDocumento15 pagineNPTEL Complex Analysis Course on Conformal Mapping Special TransformationsAKHILA PEESARANessuna valutazione finora
- Mathematics Equation 2Documento15 pagineMathematics Equation 2Abrham TamiruNessuna valutazione finora
- MechanicsDocumento31 pagineMechanicsUsman PervaizNessuna valutazione finora
- Week 4 SlidesDocumento24 pagineWeek 4 SlidesSheeraz AliNessuna valutazione finora
- Chapter 2 2d TransformationDocumento21 pagineChapter 2 2d TransformationManpreet KaurNessuna valutazione finora
- 6.2D Symmetry Operations and Point GroupsDocumento22 pagine6.2D Symmetry Operations and Point GroupsShabbir Ahamed Dharus SalamNessuna valutazione finora
- Vector LessonsDocumento36 pagineVector LessonsMarc RiveraNessuna valutazione finora
- QR decomposition matrix factorizationDocumento10 pagineQR decomposition matrix factorizationthongloganNessuna valutazione finora
- Lect Position AnalysisDocumento158 pagineLect Position AnalysisHassam Balouch100% (1)
- Lect Position AnalysisDocumento66 pagineLect Position AnalysisRayan IsranNessuna valutazione finora
- Tranformations: Some Slides Adapted From Octavia CampsDocumento34 pagineTranformations: Some Slides Adapted From Octavia CampsJamie JonesNessuna valutazione finora
- Basic Transformations:: TranslationDocumento8 pagineBasic Transformations:: TranslationprincejiNessuna valutazione finora
- 2.7.3 Example: 2.2 Matrix AlgebraDocumento8 pagine2.7.3 Example: 2.2 Matrix Algebrafredy8704Nessuna valutazione finora
- Synthesis of Simple Planar Linkages: MEAM 211Documento5 pagineSynthesis of Simple Planar Linkages: MEAM 211Hakan AkınNessuna valutazione finora
- Spherical TensorDocumento7 pagineSpherical TensormarshadjaferNessuna valutazione finora
- MATLAB Tools For Linear and Nonlinear System Stability Theorem ImplementationDocumento7 pagineMATLAB Tools For Linear and Nonlinear System Stability Theorem ImplementationFared O'riordanNessuna valutazione finora
- 2022 Iitb Ae 410 641 4Documento35 pagine2022 Iitb Ae 410 641 4diwali 2022Nessuna valutazione finora
- Finite Element Analysis Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology MadrasDocumento31 pagineFinite Element Analysis Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology MadraskhanNessuna valutazione finora
- 2D TransformsDocumento33 pagine2D TransformssyriluitNessuna valutazione finora
- U of M-Dearborn ECE Dept Laplace Transform Review: Calculating X(sDocumento29 pagineU of M-Dearborn ECE Dept Laplace Transform Review: Calculating X(sVithursan ThangarasaNessuna valutazione finora
- PSD W07S01 Z Transform 3Documento63 paginePSD W07S01 Z Transform 3Jimmi NadapdapNessuna valutazione finora
- Wigner-Eckart Theorem: Q K J J J K J M M Q KDocumento6 pagineWigner-Eckart Theorem: Q K J J J K J M M Q KAtikshaNessuna valutazione finora
- Industrial Robot AnalysisDocumento20 pagineIndustrial Robot AnalysiselkhawadNessuna valutazione finora
- 18 - Irreducible Tensor Operators and The Wigner-Eckart Theorem PDFDocumento30 pagine18 - Irreducible Tensor Operators and The Wigner-Eckart Theorem PDFUltrazordNessuna valutazione finora
- Introduction To Pipe Stress Analysis Using SolidWorksDocumento21 pagineIntroduction To Pipe Stress Analysis Using SolidWorksFemi Ibitoye100% (1)
- Chapter 2 - 2d TransformationDocumento18 pagineChapter 2 - 2d TransformationShubham TyagiNessuna valutazione finora
- Box Trans MechDocumento10 pagineBox Trans MechSomewhat a RatNessuna valutazione finora
- Exam Examples Questions With SolutionDocumento9 pagineExam Examples Questions With Solutionteektak1Nessuna valutazione finora
- Mechanics PDFDocumento102 pagineMechanics PDFEBBIE V AYROOKUZHYNessuna valutazione finora
- Geometric_Modelling_CAD_CAM_2021Session_3Documento36 pagineGeometric_Modelling_CAD_CAM_2021Session_3Aleena FarhanNessuna valutazione finora
- Quantum Mechanics - II Angular Momentum - III: Wigner-Eckart TheoremDocumento10 pagineQuantum Mechanics - II Angular Momentum - III: Wigner-Eckart TheorembluehawksNessuna valutazione finora
- Cga Unit 2Documento106 pagineCga Unit 2kiran sankarNessuna valutazione finora
- 0-CubicSpline-Bezier - Curve-25oct18Documento116 pagine0-CubicSpline-Bezier - Curve-25oct18vishwajeet patilNessuna valutazione finora
- 2 Representing Position and OrientationDocumento58 pagine2 Representing Position and OrientationHuỳnh Võ Thiện TuấnNessuna valutazione finora
- MEC Maths SyllabusDocumento13 pagineMEC Maths SyllabusAnil Kumar80% (5)
- Engineering MechanicsDocumento102 pagineEngineering MechanicsanilkumarNessuna valutazione finora
- Vector - Mechanics (Compatibility Mode)Documento17 pagineVector - Mechanics (Compatibility Mode)BalvinderNessuna valutazione finora
- Module-V(ppt)-1Documento30 pagineModule-V(ppt)-1Neha ParulekarNessuna valutazione finora
- Chapter 2Documento6 pagineChapter 2inesboumaiza293Nessuna valutazione finora
- DeterminantsDocumento53 pagineDeterminantsAngelie Mae Ajoste-AbelonNessuna valutazione finora
- Introduction To Finite Element Analysis Using SolidWorks by Randy H. ShihDocumento22 pagineIntroduction To Finite Element Analysis Using SolidWorks by Randy H. Shihhombre.muerto595957% (7)
- Shear and Moment DiagramDocumento8 pagineShear and Moment DiagrambubbaNessuna valutazione finora
- Digital Image Processing TransformationsDocumento37 pagineDigital Image Processing TransformationsAiNessuna valutazione finora
- Functions Modeling Change: A Precalculus CourseDocumento239 pagineFunctions Modeling Change: A Precalculus CourseDeniell Joyce MarquezNessuna valutazione finora
- CALCULUS II: VECTOR SPACES AND LINEAR TRANSFORMATIONSDocumento32 pagineCALCULUS II: VECTOR SPACES AND LINEAR TRANSFORMATIONSTasy WijayaNessuna valutazione finora
- Computer Graphics and Animation - 09 TransformationsDocumento35 pagineComputer Graphics and Animation - 09 TransformationsmisteryfollowNessuna valutazione finora
- Graphs and Tables of the Mathieu Functions and Their First DerivativesDa EverandGraphs and Tables of the Mathieu Functions and Their First DerivativesNessuna valutazione finora
- Introduction To Mobile Robotics - Burgard PDFDocumento745 pagineIntroduction To Mobile Robotics - Burgard PDFSantiago Garrido BullónNessuna valutazione finora
- Graphics 03 Projections PDFDocumento44 pagineGraphics 03 Projections PDFStudy portalNessuna valutazione finora
- Fundamentals Wagoner&Chenot ProblemSolutionsDocumento169 pagineFundamentals Wagoner&Chenot ProblemSolutionsVishweshRaviShrimali100% (1)
- Design of Basketbal Covered Court in Villa Ligaya Subdivision, Antipolo CityDocumento33 pagineDesign of Basketbal Covered Court in Villa Ligaya Subdivision, Antipolo CityAve MateoNessuna valutazione finora
- CS401-M3-Computer Graphics-Ktustudents - inDocumento30 pagineCS401-M3-Computer Graphics-Ktustudents - inVicNessuna valutazione finora
- Robot control part 1: Forward transform matricesDocumento37 pagineRobot control part 1: Forward transform matricesRamkumar ANessuna valutazione finora
- Rigid Motions and Homogeneous Transformations: 2.1 Representing PositionsDocumento12 pagineRigid Motions and Homogeneous Transformations: 2.1 Representing PositionsMuhammad UsmanNessuna valutazione finora
- CH 3 Kinematics Analysis of Serial ManipulatorsDocumento20 pagineCH 3 Kinematics Analysis of Serial ManipulatorsMbuso MadidaNessuna valutazione finora
- 1 s2.0 S0307904X18304487 MainDocumento19 pagine1 s2.0 S0307904X18304487 MainDesign NarayanawindpowerNessuna valutazione finora
- Lecture 2Documento5 pagineLecture 2Ramkumar RamaiahNessuna valutazione finora
- Rigid motions and homogeneous transformations explainedDocumento46 pagineRigid motions and homogeneous transformations explainedJorge CastilloNessuna valutazione finora
- UNIT 2 Computer GraphicsDocumento80 pagineUNIT 2 Computer GraphicsManikantaNessuna valutazione finora
- Worksheet 2 - TransformationDocumento19 pagineWorksheet 2 - TransformationShnia RodneyNessuna valutazione finora
- Chapter 5 Computer GraphicsDocumento14 pagineChapter 5 Computer Graphicsibrahin mahamedNessuna valutazione finora
- Homogeneous Coordinates and Frame Transformations: Lecture 2 Part I Dr. Harriet Grigg, MEC8026 Robotics 17/18Documento62 pagineHomogeneous Coordinates and Frame Transformations: Lecture 2 Part I Dr. Harriet Grigg, MEC8026 Robotics 17/18David mkNessuna valutazione finora
- Basic Geometric Transformations & Graphics ConceptsDocumento52 pagineBasic Geometric Transformations & Graphics ConceptsVishal Kumar Singh100% (7)
- Model-Based Object Pose in 25 Lines of CodeDocumento19 pagineModel-Based Object Pose in 25 Lines of CodeDiogo MaironNessuna valutazione finora
- LinearTransformations PDFDocumento8 pagineLinearTransformations PDFCorneliusNessuna valutazione finora
- A Novel Differential Kinematics Model To Compare The Kinematic Performances of 5-Axis CNC MachinesDocumento14 pagineA Novel Differential Kinematics Model To Compare The Kinematic Performances of 5-Axis CNC MachinesMarinelNessuna valutazione finora
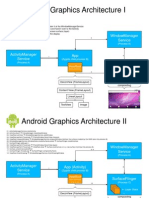
- Android Graphics ArchitectureDocumento19 pagineAndroid Graphics Architectureavinashjha99Nessuna valutazione finora
- L9 PersprojDocumento13 pagineL9 PersprojTrần Bính ĐườngNessuna valutazione finora
- Computer Graphics: 2D TransformationsDocumento15 pagineComputer Graphics: 2D TransformationsAhmed kachhiNessuna valutazione finora
- Introduction To Landing Gear DesignDocumento35 pagineIntroduction To Landing Gear DesignStanciu MariusNessuna valutazione finora
- Matrices TransformationDocumento44 pagineMatrices Transformationkarthikesan48Nessuna valutazione finora
- Transformation 2D To 3DDocumento50 pagineTransformation 2D To 3DKamalkumar1405Nessuna valutazione finora
- Introduction To Computer GraphicsDocumento47 pagineIntroduction To Computer GraphicsabhishekmietNessuna valutazione finora
- 2D TransformationDocumento31 pagine2D Transformationmohanmech2006886Nessuna valutazione finora
- Henderson 2006Documento229 pagineHenderson 2006akash shridhar143Nessuna valutazione finora
- Question Bank CGDocumento7 pagineQuestion Bank CGReshma SudarsanNessuna valutazione finora