Potrebbero piacerti anche
- CV PDFDocumento3 pagineCV PDFMauricio Gamonal San MartínNessuna valutazione finora
- Listado OPR FísicaDocumento3 pagineListado OPR FísicaMauricio Gamonal San MartínNessuna valutazione finora
- PolarizaciónDocumento18 paginePolarizaciónMauricio Gamonal San MartínNessuna valutazione finora
- Examen TermodinámicaDocumento5 pagineExamen TermodinámicaMauricio Gamonal San MartínNessuna valutazione finora
- Ayudantía 15 - Temperatura y CalorDocumento1 paginaAyudantía 15 - Temperatura y CalorMauricio Gamonal San MartínNessuna valutazione finora
- Ayudantía 4Documento2 pagineAyudantía 4Mauricio Gamonal San MartínNessuna valutazione finora
- Ejercicios Propuesto Cálculo MultivariableDocumento6 pagineEjercicios Propuesto Cálculo MultivariableMauricio Gamonal San MartínNessuna valutazione finora
- Circuito RLCDocumento4 pagineCircuito RLCMauricio Gamonal San MartínNessuna valutazione finora
- I2 2014-2 CálculoDocumento5 pagineI2 2014-2 CálculoMauricio Gamonal San MartínNessuna valutazione finora
- Apuntes Álgebra LinealDocumento9 pagineApuntes Álgebra LinealMauricio Gamonal San MartínNessuna valutazione finora
- Examen 2011-2 PDFDocumento11 pagineExamen 2011-2 PDFMauricio Gamonal San MartínNessuna valutazione finora
- Prueba LatexDocumento1 paginaPrueba LatexMauricio Gamonal San MartínNessuna valutazione finora
- Ejercicios CalculoDocumento157 pagineEjercicios CalculoSpectrus2009Nessuna valutazione finora
- Feynman Vol II A4 PDFDocumento422 pagineFeynman Vol II A4 PDFCharles Robert Wedgwood100% (1)
- Prospect oDocumento2 pagineProspect oMauricio Gamonal San MartínNessuna valutazione finora
- Formulario de Precálculo (Matemáticas-KALASHNIKOV)Documento21 pagineFormulario de Precálculo (Matemáticas-KALASHNIKOV)Andrés Alfonso Hdez100% (1)
- Esta de Ácidos NucléicosDocumento80 pagineEsta de Ácidos NucléicosMauricio Gamonal San Martín100% (1)
- User Guide LatexDocumento182 pagineUser Guide LatexMauricio Gamonal San MartínNessuna valutazione finora
- I1 2013-2 CalculoDocumento3 pagineI1 2013-2 CalculoMauricio Gamonal San MartínNessuna valutazione finora
- Ayuda y Instrucciones de UsoDocumento1 paginaAyuda y Instrucciones de Usopeperone811786Nessuna valutazione finora
- Ejercicios de SilogismosDocumento29 pagineEjercicios de SilogismosSandra Lucia Gomez50% (6)
- Material Arreglos en PythonDocumento6 pagineMaterial Arreglos en PythonAlex M.Nessuna valutazione finora
- Teorema de BolzanoDocumento7 pagineTeorema de Bolzanojoley andaNessuna valutazione finora
- Santiago Tarea 1 - 1601-2020Documento6 pagineSantiago Tarea 1 - 1601-2020santiago correaNessuna valutazione finora
- Teoria de Los JuegosDocumento22 pagineTeoria de Los JuegosGabriel Di BellaNessuna valutazione finora
- Errores de RedondeoDocumento2 pagineErrores de RedondeoDeyner VargasNessuna valutazione finora
- 6 7 Teorema ConvolucionDocumento8 pagine6 7 Teorema ConvolucionAlexander ValenciaNessuna valutazione finora
- Proyecto EcuacionesDocumento6 pagineProyecto EcuacionesCarlos Mario Hidalgo BecerraNessuna valutazione finora
- Presentación 1Documento21 paginePresentación 1Villanueva Morales AranzaNessuna valutazione finora
- Módulo Primer y Segundo Período 2Documento23 pagineMódulo Primer y Segundo Período 2Alvaro RiveraNessuna valutazione finora
- Manual de Regresiön Regresión Lineal MúltipleDocumento27 pagineManual de Regresiön Regresión Lineal Múltiplejavier angulo peñaNessuna valutazione finora
- GEOMETRÍADocumento14 pagineGEOMETRÍAJosé LuqueNessuna valutazione finora
- Ejercicios Unidad 2 BocosDocumento16 pagineEjercicios Unidad 2 BocosGabriel Bruce Coba Alvarez75% (4)
- Actividad 01-5°Documento10 pagineActividad 01-5°RogerHernanRodriguezToctoNessuna valutazione finora
- Curso HTMLDocumento299 pagineCurso HTMLIvan TrinidadNessuna valutazione finora
- Función Lineal - Actividad 2 - Parte 2Documento4 pagineFunción Lineal - Actividad 2 - Parte 2Samuel KWNessuna valutazione finora
- Temp y Calor Marzo 2012Documento101 pagineTemp y Calor Marzo 2012Guillermo Cesar GanemNessuna valutazione finora
- Bitácora de Matematicas de 10° P4 - 1Documento8 pagineBitácora de Matematicas de 10° P4 - 1Melany OlivaNessuna valutazione finora
- Principio de BernoulliDocumento12 paginePrincipio de BernoulliJuan David Rondinel BulejeNessuna valutazione finora
- Cimentacion de Torres de Alta TensionDocumento39 pagineCimentacion de Torres de Alta TensionCésar Autentics OL71% (7)
- Caso BDocumento2 pagineCaso BJoseDeLaRosaPerez20% (5)
- Rekenrek Vs Sorobán II - Diversidad de Estrategias o Cálculo AlgorítmicoDocumento6 pagineRekenrek Vs Sorobán II - Diversidad de Estrategias o Cálculo AlgorítmicoRoberto LlugsaNessuna valutazione finora
- Geometria Analítica La Recta (Ejercicios)Documento3 pagineGeometria Analítica La Recta (Ejercicios)Santiago CominaNessuna valutazione finora
- Cuestionario PDFDocumento3 pagineCuestionario PDFJavier DuduNessuna valutazione finora
- Formación de ProyeccionesDocumento6 pagineFormación de ProyeccionesVanessaNessuna valutazione finora
- Algoritmo para MemorizarDocumento8 pagineAlgoritmo para MemorizarRafaél J MalaveNessuna valutazione finora
- Ejemplos de MRUVDocumento24 pagineEjemplos de MRUVMaría Paz GutiérrezNessuna valutazione finora
- PAGPRO - Formato de ArchivosDocumento20 paginePAGPRO - Formato de Archivoskerly1111Nessuna valutazione finora
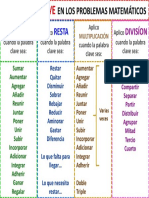
- Palabras Clave para La Resolución de Problemas MatemáticosDocumento1 paginaPalabras Clave para La Resolución de Problemas MatemáticosEdi Bermejo Robles85% (20)