Potrebbero piacerti anche
- A New System of Alternating Current Motors and Transformers and Other EssaysDa EverandA New System of Alternating Current Motors and Transformers and Other EssaysValutazione: 5 su 5 stelle5/5 (1)
- Mechanical Dynamics, The Swing Equation, Units 1.0 PreliminariesDocumento30 pagineMechanical Dynamics, The Swing Equation, Units 1.0 PreliminariesjaragumuraNessuna valutazione finora
- A New System of Alternating Current Motors and TransformersDa EverandA New System of Alternating Current Motors and TransformersValutazione: 1 su 5 stelle1/5 (1)
- Swing EquationDocumento32 pagineSwing EquationpsmajuNessuna valutazione finora
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDa EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlValutazione: 5 su 5 stelle5/5 (1)
- Unit - 5Documento10 pagineUnit - 5Navin KumarNessuna valutazione finora
- TorquesDocumento12 pagineTorquesmachinemam29Nessuna valutazione finora
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesDa EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNessuna valutazione finora
- DTrends Feb 2011Documento14 pagineDTrends Feb 2011Rui AllenNessuna valutazione finora
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetDa EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNessuna valutazione finora
- Lab 8 DCMotor ParametersDocumento11 pagineLab 8 DCMotor ParametersNikhil PatroNessuna valutazione finora
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsDa EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNessuna valutazione finora
- Chopper Control DC Drive - 090075mDocumento8 pagineChopper Control DC Drive - 090075mIsuru Pasan Dasanayake100% (1)
- Power System Stability LectureDocumento20 paginePower System Stability LectureSailesh KhandelwalNessuna valutazione finora
- Review QuestionsDocumento15 pagineReview QuestionsSuganthiVasanNessuna valutazione finora
- DC Brush Motor TheoryDocumento7 pagineDC Brush Motor Theoryjfsmenezes4534Nessuna valutazione finora
- Power System StabilityDocumento78 paginePower System StabilityGeetha GaganNessuna valutazione finora
- Power System Stability LectureDocumento17 paginePower System Stability LectureMuhammad Taufan Yoga P.Nessuna valutazione finora
- Models For DC MotorsDocumento8 pagineModels For DC MotorsebrahimpanNessuna valutazione finora
- TRANSIENT STABILITY LIMITDocumento14 pagineTRANSIENT STABILITY LIMITrasim_m1146Nessuna valutazione finora
- Synchronous Machine 1Documento6 pagineSynchronous Machine 1dmug793Nessuna valutazione finora
- The Induction Motor: A Detailed Look at Its Operation and CharacteristicsDocumento13 pagineThe Induction Motor: A Detailed Look at Its Operation and CharacteristicsAsimNessuna valutazione finora
- Theoretical AnalysisDocumento23 pagineTheoretical AnalysistrexcvNessuna valutazione finora
- Research On Moment of Inertia Measurement Method2019Documento7 pagineResearch On Moment of Inertia Measurement Method2019ait oubella marouaneNessuna valutazione finora
- Synchronous MachineDocumento24 pagineSynchronous MachineNur AinaqilahNessuna valutazione finora
- Experiment 7 Synchronous Motor V-CurvesDocumento12 pagineExperiment 7 Synchronous Motor V-Curvesshukla_shrishNessuna valutazione finora
- ECE 320 Chapter 4: DC MotorsDocumento7 pagineECE 320 Chapter 4: DC MotorsHüseyin Murat PolaterNessuna valutazione finora
- Chapter 5Documento73 pagineChapter 5Niket GuptaNessuna valutazione finora
- Chap 11 Transient StabilityDocumento124 pagineChap 11 Transient StabilityAwais HabibNessuna valutazione finora
- Cap 1Documento18 pagineCap 1Ali Hussien0% (1)
- Swing EquationDocumento3 pagineSwing EquationSudeep AcharyaNessuna valutazione finora
- Part I: Principles of DC Drive Control: Learning ObjectivesDocumento4 paginePart I: Principles of DC Drive Control: Learning ObjectivesPham LongNessuna valutazione finora
- Power System StabilityDocumento9 paginePower System StabilityराघवतोतलाNessuna valutazione finora
- DC Motor Lab: Efficiency and Gradient CalculationsDocumento8 pagineDC Motor Lab: Efficiency and Gradient CalculationsFuad SuleymanNessuna valutazione finora
- CH 38synchronous Motor1 PDFDocumento46 pagineCH 38synchronous Motor1 PDFWidia AstutiNessuna valutazione finora
- Flywheel Smoothens Non-Uniform TorqueDocumento14 pagineFlywheel Smoothens Non-Uniform Torquepixelo09Nessuna valutazione finora
- Understanding Power System Stability FundamentalsDocumento11 pagineUnderstanding Power System Stability FundamentalsChetan KotwalNessuna valutazione finora
- Power System StabilityDocumento29 paginePower System StabilityRanieri BenčićNessuna valutazione finora
- Induction Motor Starting Methods ExplainedDocumento9 pagineInduction Motor Starting Methods ExplainedMADHUNessuna valutazione finora
- Electric MachinesDocumento17 pagineElectric Machinespritt2010Nessuna valutazione finora
- The Synchronous Machine: Experiment No. 5Documento10 pagineThe Synchronous Machine: Experiment No. 5Prashant JhaNessuna valutazione finora
- Power Electronics and Elec Drive New1 For Power and Control StreamDocumento176 paginePower Electronics and Elec Drive New1 For Power and Control StreamBacha NegeriNessuna valutazione finora
- Synchronizing Power in Synchronous MachinesDocumento15 pagineSynchronizing Power in Synchronous Machinesgurunathan14Nessuna valutazione finora
- Understanding power system transients conceptuallyDocumento6 pagineUnderstanding power system transients conceptuallyxernoxianNessuna valutazione finora
- Fuzzy Logic Control of A Switched Reluctance MotorDocumento5 pagineFuzzy Logic Control of A Switched Reluctance MotorKarthi KumarNessuna valutazione finora
- Induction Motors Equivalent CircuitDocumento27 pagineInduction Motors Equivalent Circuitk rajendraNessuna valutazione finora
- Lec 33Documento24 pagineLec 33deciohNessuna valutazione finora
- ZFGHFGHFGDocumento6 pagineZFGHFGHFGAhmad Firdaus Zawawil AnwarNessuna valutazione finora
- PSS ControllerDocumento14 paginePSS ControllerAnonymous BBX2E87aHNessuna valutazione finora
- Em Ii PDFDocumento76 pagineEm Ii PDFRavi SharmaNessuna valutazione finora
- وصف مواد تخصص الهندسة الكهربائية باللغة العربيةDocumento23 pagineوصف مواد تخصص الهندسة الكهربائية باللغة العربيةحمزة الفيتوريNessuna valutazione finora
- Synchronous Machines TestsDocumento22 pagineSynchronous Machines TestsKareem CambridgeNessuna valutazione finora
- How gas turbines increase electrical load by boosting fuel flowDocumento10 pagineHow gas turbines increase electrical load by boosting fuel flowabhijit.adgube3376Nessuna valutazione finora
- DC Motor Calculations 2004Documento27 pagineDC Motor Calculations 2004erkamlakar2234Nessuna valutazione finora
- Torque Torque MomentDocumento11 pagineTorque Torque MomentIfwat ArifNessuna valutazione finora
- Motor Sizing CalculationDocumento3 pagineMotor Sizing CalculationRizwan TahirNessuna valutazione finora
- Chopper Controlled DC DrivesDocumento6 pagineChopper Controlled DC DrivesKalum ChandraNessuna valutazione finora
- Acfrogbnenmibparih Ltu2vrvicspmmotyvmyn8m2iyyxdfv13heqim1iwxkxwjdcrbq0kdgk3emlm5iaoxet Grgnocr-gma7-Ptim4k6jsouhhb0nsx Mn2bjhlvb8hafi R-V2s Emjn5tj1Documento7 pagineAcfrogbnenmibparih Ltu2vrvicspmmotyvmyn8m2iyyxdfv13heqim1iwxkxwjdcrbq0kdgk3emlm5iaoxet Grgnocr-gma7-Ptim4k6jsouhhb0nsx Mn2bjhlvb8hafi R-V2s Emjn5tj1KISHORE KNessuna valutazione finora
- Speed Control of 3 Phase Induction Motor 1 Aim: Experiment No: 3Documento10 pagineSpeed Control of 3 Phase Induction Motor 1 Aim: Experiment No: 3rohitkjNessuna valutazione finora
- Unit 1 QADocumento26 pagineUnit 1 QAanbuelectricalNessuna valutazione finora
- All QPDocumento3 pagineAll QPanbuelectricalNessuna valutazione finora
- Teaching PlanDocumento3 pagineTeaching PlananbuelectricalNessuna valutazione finora
- Pages From 336 - O17 - CRDocumento14 paginePages From 336 - O17 - CRanbuelectricalNessuna valutazione finora
- Unit III Permanent Magnet Brushless DC MotorsDocumento3 pagineUnit III Permanent Magnet Brushless DC MotorsanbuelectricalNessuna valutazione finora
- Pages From 336 - O17 - CRDocumento14 paginePages From 336 - O17 - CRanbuelectricalNessuna valutazione finora
- All QuestionDocumento3 pagineAll QuestionanbuelectricalNessuna valutazione finora
- Permanent Magnet Motor GuideDocumento36 paginePermanent Magnet Motor GuidekkarthiksNessuna valutazione finora
- Unit Ii SRM QaDocumento21 pagineUnit Ii SRM QaanbuelectricalNessuna valutazione finora
- Termwork Proforma1Documento1 paginaTermwork Proforma1anbuelectricalNessuna valutazione finora
- Pages From 336 - A19 - CRDocumento15 paginePages From 336 - A19 - CRanbuelectricalNessuna valutazione finora
- Pages From 336 - A19 - CRDocumento15 paginePages From 336 - A19 - CRanbuelectricalNessuna valutazione finora
- Annual Day Sports Day BudgetDocumento3 pagineAnnual Day Sports Day Budgetanbuelectrical50% (2)
- Pages From 336 - O16 - CRDocumento14 paginePages From 336 - O16 - CRanbuelectricalNessuna valutazione finora
- Staff ID Name Dept Desig MobileDocumento5 pagineStaff ID Name Dept Desig MobileanbuelectricalNessuna valutazione finora
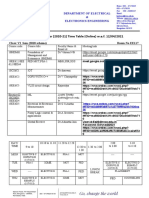
- Tentative Schedule of June 2022 Exam PDFDocumento1 paginaTentative Schedule of June 2022 Exam PDFanbuelectricalNessuna valutazione finora
- Lab AllotmentDocumento1 paginaLab AllotmentanbuelectricalNessuna valutazione finora
- 336 Roever April2020 ExamDocumento1 pagina336 Roever April2020 ExamanbuelectricalNessuna valutazione finora
- 6TH SEM - NewlinkDocumento3 pagine6TH SEM - NewlinkanbuelectricalNessuna valutazione finora
- Dote LetterDocumento119 pagineDote LetteranbuelectricalNessuna valutazione finora
- Thanthai Roever Institute of Polytechnic College: Progress Through TechnologyDocumento1 paginaThanthai Roever Institute of Polytechnic College: Progress Through TechnologyanbuelectricalNessuna valutazione finora
- Thanthai Roever Polytechnic College Offers 6 Engineering CoursesDocumento2 pagineThanthai Roever Polytechnic College Offers 6 Engineering CoursesanbuelectricalNessuna valutazione finora
- Co Po Mapping For Other Program Courses Serviced by Eee FacultyDocumento1 paginaCo Po Mapping For Other Program Courses Serviced by Eee FacultyanbuelectricalNessuna valutazione finora
- Jeevinath Sport ReportDocumento1 paginaJeevinath Sport ReportanbuelectricalNessuna valutazione finora
- Gap Analysis Tool For Determining Continuing EducationDocumento2 pagineGap Analysis Tool For Determining Continuing EducationanbuelectricalNessuna valutazione finora
- 336 ProjectcommitteeDocumento17 pagine336 ProjectcommitteeanbuelectricalNessuna valutazione finora
- Unit I Introduction To Big Data: 1.1 DefinitionDocumento16 pagineUnit I Introduction To Big Data: 1.1 DefinitionvinodkharNessuna valutazione finora
- Itsshhjb5 Personal File Front Page1Documento2 pagineItsshhjb5 Personal File Front Page1anbuelectricalNessuna valutazione finora
- Ttcshhjbformat WorkloadDocumento3 pagineTtcshhjbformat WorkloadanbuelectricalNessuna valutazione finora
- Department of Electrical and Electronics Engineering: PlacementDocumento3 pagineDepartment of Electrical and Electronics Engineering: PlacementanbuelectricalNessuna valutazione finora
- Hybrid Propulsion Concepts On ShipsDocumento11 pagineHybrid Propulsion Concepts On ShipsKristomiDerMarine-IngenieurNessuna valutazione finora
- Teles ControlDocumento28 pagineTeles Controlquocthinh100% (1)
- UVR501Documento10 pagineUVR501Manuel OteroNessuna valutazione finora
- C40D6E DDocumento7 pagineC40D6E DMildred Gizeh Aguirre MonroyNessuna valutazione finora
- Altena TorDocumento8 pagineAltena TorJb EnarioNessuna valutazione finora
- Pramac GSW110IDocumento10 paginePramac GSW110IJanko GardaševićNessuna valutazione finora
- Alternator Classification and OperationDocumento8 pagineAlternator Classification and OperationanunilaNessuna valutazione finora
- Manual LeroyDocumento28 pagineManual LeroyManuel Alberto Ortiz GalánNessuna valutazione finora
- Hindalco Industries Limited: 6 X 150 MW Aditya and Mahan Aluminium ProjectDocumento3 pagineHindalco Industries Limited: 6 X 150 MW Aditya and Mahan Aluminium ProjectSUBHASISH MUKHERJEENessuna valutazione finora
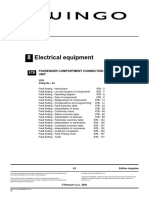
- 1 - Engine and Peripherals - Passanger Compartment Connecton Unit (OBDII)Documento179 pagine1 - Engine and Peripherals - Passanger Compartment Connecton Unit (OBDII)Mario PenezićNessuna valutazione finora
- ListerDocumento18 pagineListermuhammad arifNessuna valutazione finora
- Technical Data Sheet Technical Data Sheet Technical Data Sheet Technical Data Sheet P 800 M P 800 M P 800 M P 800 MDocumento4 pagineTechnical Data Sheet Technical Data Sheet Technical Data Sheet Technical Data Sheet P 800 M P 800 M P 800 M P 800 MMounir YousfiNessuna valutazione finora
- 5 - Control Panel Training PDFDocumento28 pagine5 - Control Panel Training PDFbensonNessuna valutazione finora
- Maintenance Manual for LHB Coaches EOG Power Car ChapterDocumento41 pagineMaintenance Manual for LHB Coaches EOG Power Car Chaptervishak MkNessuna valutazione finora
- Notes Ee 111 Fundamentals of Electrical EngineeringDocumento73 pagineNotes Ee 111 Fundamentals of Electrical EngineeringadityaNessuna valutazione finora
- 3 Phase InstallationDocumento13 pagine3 Phase InstallationBernard Munyithya100% (1)
- Lessons in Electric Circuits, Volume I - Tony R. KuphaldtDocumento558 pagineLessons in Electric Circuits, Volume I - Tony R. KuphaldtmilharNessuna valutazione finora
- Sub Engineer DetailsDocumento17 pagineSub Engineer DetailsMalhotraSoniaNessuna valutazione finora
- Induction Moter Mob..Documento111 pagineInduction Moter Mob..Anil KumarNessuna valutazione finora
- AutomotiveDocumento124 pagineAutomotiveAhmed Nahrawy100% (9)
- Question and Answer AC MachinesDocumento12 pagineQuestion and Answer AC MachinesVishal SawhNessuna valutazione finora
- Module 1Documento9 pagineModule 1Nikhilesh RainaNessuna valutazione finora
- Protection of Synchronous GeneratorsDocumento117 pagineProtection of Synchronous GeneratorsprotectionworkNessuna valutazione finora
- Machinery Used in Power Generation SubstationDocumento116 pagineMachinery Used in Power Generation SubstationEjlal HassanNessuna valutazione finora
- Shopnil Tower 30KVADocumento5 pagineShopnil Tower 30KVABrown builderNessuna valutazione finora
- Lab # 8 - Voltage RegulationDocumento8 pagineLab # 8 - Voltage Regulationsiyal343Nessuna valutazione finora
- 800kva CaterpillerDocumento6 pagine800kva CaterpillerSureshkumar Kulanthai VeluNessuna valutazione finora
- DE Ee1Documento4 pagineDE Ee1Jj JumawanNessuna valutazione finora
- MCQ DC Machines MasterDocumento16 pagineMCQ DC Machines MasterDeepak Choudhary DCNessuna valutazione finora
- BEE 42 AssignmentDocumento3 pagineBEE 42 AssignmentVikesh gondNessuna valutazione finora
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseDa EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseValutazione: 4.5 su 5 stelle4.5/5 (50)
- Control of Power Electronic Converters and Systems: Volume 1Da EverandControl of Power Electronic Converters and Systems: Volume 1Valutazione: 5 su 5 stelle5/5 (1)
- Design of Foundations for Offshore Wind TurbinesDa EverandDesign of Foundations for Offshore Wind TurbinesValutazione: 5 su 5 stelle5/5 (3)
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedDa EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedValutazione: 5 su 5 stelle5/5 (1)
- Piping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationDa EverandPiping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationValutazione: 4 su 5 stelle4/5 (18)
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionDa EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionValutazione: 4.5 su 5 stelle4.5/5 (3)
- The Laws of Thermodynamics: A Very Short IntroductionDa EverandThe Laws of Thermodynamics: A Very Short IntroductionValutazione: 4.5 su 5 stelle4.5/5 (10)
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsDa EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsValutazione: 3.5 su 5 stelle3.5/5 (3)
- Quantum Mechanics 4: Spin, Lasers, Pauli Exclusion & Barrier PenetrationDa EverandQuantum Mechanics 4: Spin, Lasers, Pauli Exclusion & Barrier PenetrationValutazione: 1 su 5 stelle1/5 (1)
- Introduction to Applied Thermodynamics: The Commonwealth and International Library: Mechanical Engineering DivisionDa EverandIntroduction to Applied Thermodynamics: The Commonwealth and International Library: Mechanical Engineering DivisionValutazione: 2.5 su 5 stelle2.5/5 (3)
- Rolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsDa EverandRolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsNessuna valutazione finora
- Oil and Gas Pipelines: Integrity and Safety HandbookDa EverandOil and Gas Pipelines: Integrity and Safety HandbookNessuna valutazione finora
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsDa EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNessuna valutazione finora
- Handbook of Mechanical and Materials EngineeringDa EverandHandbook of Mechanical and Materials EngineeringValutazione: 5 su 5 stelle5/5 (4)
- Operational Amplifier Circuits: Analysis and DesignDa EverandOperational Amplifier Circuits: Analysis and DesignValutazione: 4.5 su 5 stelle4.5/5 (2)
- Machinery Failure Analysis Handbook: Sustain Your Operations and Maximize UptimeDa EverandMachinery Failure Analysis Handbook: Sustain Your Operations and Maximize UptimeValutazione: 3.5 su 5 stelle3.5/5 (4)
- Albert Einstein's Theory Of Relativity Explained SimplyDa EverandAlbert Einstein's Theory Of Relativity Explained SimplyNessuna valutazione finora
- 1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideDa Everand1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideValutazione: 3.5 su 5 stelle3.5/5 (7)
- The Long Hangover: Putin's New Russia and the Ghosts of the PastDa EverandThe Long Hangover: Putin's New Russia and the Ghosts of the PastValutazione: 4.5 su 5 stelle4.5/5 (76)