Potrebbero piacerti anche
- Introduction to Fly-by-Wire Flight Control Systems: The professional pilot’s guide to understanding modern aircraft controlsDa EverandIntroduction to Fly-by-Wire Flight Control Systems: The professional pilot’s guide to understanding modern aircraft controlsNessuna valutazione finora
- Aerotowing Gliders: A Guide to Towing Gliders, with an Emphasis on SafetyDa EverandAerotowing Gliders: A Guide to Towing Gliders, with an Emphasis on SafetyNessuna valutazione finora
- Slab DesignDocumento96 pagineSlab Designdilrangi100% (2)
- Solution Manual For Modern Quantum Mechanics 2nd Edition by SakuraiDocumento13 pagineSolution Manual For Modern Quantum Mechanics 2nd Edition by Sakuraia440706299Nessuna valutazione finora
- AE332 Initial SizingDocumento54 pagineAE332 Initial SizingKumarGuglothNessuna valutazione finora
- Aerospace Actuators 2: Signal-by-Wire and Power-by-WireDa EverandAerospace Actuators 2: Signal-by-Wire and Power-by-WireNessuna valutazione finora
- CAIP Vol II PropellersDocumento32 pagineCAIP Vol II PropellersSHM 555Nessuna valutazione finora
- Helicopter PPT 1Documento18 pagineHelicopter PPT 1Sunil PanwarNessuna valutazione finora
- Introduction To Flight Test Engineering: Dan HrehovDocumento30 pagineIntroduction To Flight Test Engineering: Dan HrehovmsrajuNessuna valutazione finora
- Aircraft Performance, Stability and Control With Experiments in FlightDocumento8 pagineAircraft Performance, Stability and Control With Experiments in FlightMohammad AlthafNessuna valutazione finora
- Aerospace Actuators 1: Needs, Reliability and Hydraulic Power SolutionsDa EverandAerospace Actuators 1: Needs, Reliability and Hydraulic Power SolutionsNessuna valutazione finora
- Helicopter AerodynamicsDocumento1 paginaHelicopter AerodynamicsSatyavinaykumar TokalaNessuna valutazione finora
- Aircraft StabilityDocumento126 pagineAircraft StabilitymunirnadirNessuna valutazione finora
- Prelim DesignDocumento94 paginePrelim DesignccoyureNessuna valutazione finora
- McDonnell USAF Datcom 1979 Volume 1 User ManualDocumento313 pagineMcDonnell USAF Datcom 1979 Volume 1 User ManualFabian ZenderNessuna valutazione finora
- Aircraft Instrument SystemsDocumento34 pagineAircraft Instrument SystemsArun Vinthan100% (1)
- Drag PolarDocumento11 pagineDrag PolarVijay KishoreNessuna valutazione finora
- Aircraft Test Flight 1 Flight Mechanics Mod IIIDocumento75 pagineAircraft Test Flight 1 Flight Mechanics Mod IIIjacob ellyNessuna valutazione finora
- Classroom Activities in Aerodynamics: © 2000 Dr. Charley Rodriguez, PH.DDocumento21 pagineClassroom Activities in Aerodynamics: © 2000 Dr. Charley Rodriguez, PH.DAerocse EceitmechNessuna valutazione finora
- M13 HelicopterDocumento4 pagineM13 HelicopterJuan NightstandNessuna valutazione finora
- m-17 Propeller QuestionsDocumento28 paginem-17 Propeller QuestionsqwesadNessuna valutazione finora
- Powered Flying Control Units (Pfcus)Documento20 paginePowered Flying Control Units (Pfcus)Ibraheem Sadiq0% (1)
- Turbulences: Remeiniscences of of an Airline PilotDa EverandTurbulences: Remeiniscences of of an Airline PilotNessuna valutazione finora
- NR - Numerical Model of Single Main Rotor Helicopter DynamicsDocumento10 pagineNR - Numerical Model of Single Main Rotor Helicopter DynamicsHossam T BadranNessuna valutazione finora
- Aircraft Systems - Lec 3Documento36 pagineAircraft Systems - Lec 3aahsan345100% (1)
- Cessna 172 DesignDocumento20 pagineCessna 172 Designwillmike100% (2)
- V-N DiagramDocumento3 pagineV-N Diagram2jraj100% (1)
- Oral and Practical Review: Reflections on the Part 147 CourseDa EverandOral and Practical Review: Reflections on the Part 147 CourseNessuna valutazione finora
- Stability DerivativesDocumento8 pagineStability DerivativesNurain OkeNessuna valutazione finora
- Basic Autopilot SystemsDocumento4 pagineBasic Autopilot SystemsSonali Srivastava100% (1)
- ASIC Design Flow - SpecStepDocumento58 pagineASIC Design Flow - SpecStepDang NguyenNessuna valutazione finora
- Assesment Exam (Powerplant)Documento18 pagineAssesment Exam (Powerplant)Sealtiel1020Nessuna valutazione finora
- Unmanned Aircraft SystemsDa EverandUnmanned Aircraft SystemsElla AtkinsNessuna valutazione finora
- Aeroplane Aerodynamics, Structures & SystemsDocumento389 pagineAeroplane Aerodynamics, Structures & Systemsadityarana531Nessuna valutazione finora
- SPACE GASS 12 ManualDocumento968 pagineSPACE GASS 12 Manualozbuild100% (3)
- MADNotes J2MEDocumento34 pagineMADNotes J2MEKanchana MorumpalliNessuna valutazione finora
- 5 Asymmetric Flight PDFDocumento11 pagine5 Asymmetric Flight PDFAvinash KumarNessuna valutazione finora
- Septic Tank - Components and Design of Septic Tank Based On PopulationDocumento7 pagineSeptic Tank - Components and Design of Septic Tank Based On Populationمنير أحمدNessuna valutazione finora
- Chapter 1 - Distillation PDFDocumento107 pagineChapter 1 - Distillation PDFFatin Natasha NazriNessuna valutazione finora
- Four Fundamentals of FlightDocumento4 pagineFour Fundamentals of FlightMike AguirreNessuna valutazione finora
- Mod 11 01-10-09 ExtrasDocumento591 pagineMod 11 01-10-09 ExtrassebastienNessuna valutazione finora
- Basic Aerodynamic & V-N Diagram: Priyaranjan Pradhan/Seetharaman RamalingamDocumento22 pagineBasic Aerodynamic & V-N Diagram: Priyaranjan Pradhan/Seetharaman RamalingamSeetharaman RamalingamNessuna valutazione finora
- Logbook Entries and Certificate EndorsementsDocumento3 pagineLogbook Entries and Certificate EndorsementsMike Aguirre100% (1)
- PCAR 4 and 5Documento26 paginePCAR 4 and 5rayven mashiroNessuna valutazione finora
- Weight and Balance: Loading DefinitionsDocumento6 pagineWeight and Balance: Loading DefinitionsJuly TadeNessuna valutazione finora
- 08rr410306 Jet Propulsion and Rocket EngineeringDocumento6 pagine08rr410306 Jet Propulsion and Rocket EngineeringsmijusNessuna valutazione finora
- Fly by Wire and Fly by OpticsDocumento7 pagineFly by Wire and Fly by OpticsvenkatsahulNessuna valutazione finora
- AF Structure ContDocumento21 pagineAF Structure ContlongmilkNessuna valutazione finora
- Aircraft Systems - Chapter 07Documento40 pagineAircraft Systems - Chapter 07Dane EnriquezNessuna valutazione finora
- Cat A - Aeroplanes Essays: Describe The Following TermsDocumento2 pagineCat A - Aeroplanes Essays: Describe The Following Termscollins100% (1)
- Airframe Electrical FAA QuestionsDocumento5 pagineAirframe Electrical FAA QuestionsJAYACHANDRANNessuna valutazione finora
- General Weight and BalanceDocumento30 pagineGeneral Weight and Balancehansen majayaNessuna valutazione finora
- Helicopter AerodynamicsDocumento12 pagineHelicopter AerodynamicsDanyalAmirNessuna valutazione finora
- XFLR5 - and - Stability - Analysis PDFDocumento41 pagineXFLR5 - and - Stability - Analysis PDFleoneldeutschNessuna valutazione finora
- Helicopter Flight TheoryDocumento21 pagineHelicopter Flight TheoryDasBrothers100% (1)
- 4-Turbine Engine OperationDocumento13 pagine4-Turbine Engine OperationMaintenance PSINessuna valutazione finora
- Propeller TheoryDocumento9 paginePropeller TheoryFlorenceNessuna valutazione finora
- History of The Cessna 172RDocumento10 pagineHistory of The Cessna 172RMatthew SilabNessuna valutazione finora
- Aeroplane EssaysDocumento12 pagineAeroplane EssayscollinsNessuna valutazione finora
- Flying The Jet City Aircraft Md-90: PreparationDocumento10 pagineFlying The Jet City Aircraft Md-90: PreparationCharles SingerNessuna valutazione finora
- 15 Seater Commuter AircraftDocumento90 pagine15 Seater Commuter AircraftBala AbineshNessuna valutazione finora
- Enhanced Avionics System A Complete Guide - 2020 EditionDa EverandEnhanced Avionics System A Complete Guide - 2020 EditionNessuna valutazione finora
- Cronje Chemical 2010 PDFDocumento569 pagineCronje Chemical 2010 PDFPara MoreNessuna valutazione finora
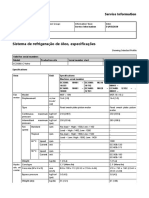
- Sistema de Refrigeração de Óleo, EspecificaçõesDocumento2 pagineSistema de Refrigeração de Óleo, EspecificaçõesAlexandreNessuna valutazione finora
- 13 Years BITSAT Past PapersDocumento304 pagine13 Years BITSAT Past PapersEdu VsatNessuna valutazione finora
- Klüberpaste HS 91-21 EN enDocumento4 pagineKlüberpaste HS 91-21 EN entroy2k0Nessuna valutazione finora
- Unit 2 - Introduction To Java - Solutions For Class 9 ICSE APC Understanding Computer Applications With BlueJ Including Java Programs - KnowledgeBoatDocumento8 pagineUnit 2 - Introduction To Java - Solutions For Class 9 ICSE APC Understanding Computer Applications With BlueJ Including Java Programs - KnowledgeBoatGopi Selvaraj67% (3)
- Sample Questions Paper 2 - TNQT Digital-4July19Documento6 pagineSample Questions Paper 2 - TNQT Digital-4July19Gudimetla KowshikNessuna valutazione finora
- Module 4. Heat TransferDocumento28 pagineModule 4. Heat TransferBry RamosNessuna valutazione finora
- Dh-Ipc-Hdw8341X-3D-S2: 3Mp Wizmind Dual-Lens Network CameraDocumento3 pagineDh-Ipc-Hdw8341X-3D-S2: 3Mp Wizmind Dual-Lens Network CameraSteve CheaNessuna valutazione finora
- How Can Dust Make Planets More Suitable For Life?: Authors: Associate EditorDocumento4 pagineHow Can Dust Make Planets More Suitable For Life?: Authors: Associate EditorLucien GbezeNessuna valutazione finora
- 1B MotionDocumento20 pagine1B MotionghalyaNessuna valutazione finora
- DREHMO Matic-C ENDocumento36 pagineDREHMO Matic-C ENsimbamikeNessuna valutazione finora
- ECON4150 - Introductory Econometrics Lecture 2: Review of StatisticsDocumento41 pagineECON4150 - Introductory Econometrics Lecture 2: Review of StatisticsSaul DuranNessuna valutazione finora
- Fujitsu APMDocumento2 pagineFujitsu APMLuis D100% (1)
- Computer Science: Chapter: 16 Relatonal DatabaseDocumento10 pagineComputer Science: Chapter: 16 Relatonal DatabaseIshika RajputNessuna valutazione finora
- Assignments CHSSCDocumento7 pagineAssignments CHSSCphani12_chem5672Nessuna valutazione finora
- Simultaneous Equations - Word ProblemsDocumento27 pagineSimultaneous Equations - Word ProblemsSandy Wong0% (1)
- Jaap's Puzzle PageDocumento1 paginaJaap's Puzzle PagePhilippe DenielNessuna valutazione finora
- Rules, Scripts and BeanshellDocumento7 pagineRules, Scripts and BeanshelltgudyktzxNessuna valutazione finora
- 2210 w18 Ms 12Documento12 pagine2210 w18 Ms 12Fiyazul HaqueNessuna valutazione finora
- A Generic Circular BufferDocumento3 pagineA Generic Circular BufferSatish KumarNessuna valutazione finora
- Unit 7: Brittel Coating MethodsDocumento12 pagineUnit 7: Brittel Coating Methodsmaya singhNessuna valutazione finora
- Money Calculations (F)Documento14 pagineMoney Calculations (F)Pavan GhelaniNessuna valutazione finora
- Name: Class Number: - Date: - Section: - ScheduleDocumento11 pagineName: Class Number: - Date: - Section: - ScheduleErica AguirreNessuna valutazione finora