Potrebbero piacerti anche
- MhamotdesDocumento30 pagineMhamotdesakhilesh120Nessuna valutazione finora
- Ape030 Bennion 2011 oDocumento28 pagineApe030 Bennion 2011 oakhilesh120Nessuna valutazione finora
- PSB Series - Lit - V1.2.1 UpdatedDocumento2 paginePSB Series - Lit - V1.2.1 Updatedakhilesh120Nessuna valutazione finora
- Mi 150084Documento11 pagineMi 150084akhilesh120Nessuna valutazione finora
- EGU21 668 PrintDocumento1 paginaEGU21 668 Printakhilesh120Nessuna valutazione finora
- Design and Construction of An Evaporative Cooling System For The Storage of Fresh TomatoDocumento10 pagineDesign and Construction of An Evaporative Cooling System For The Storage of Fresh Tomatoakhilesh120Nessuna valutazione finora
- Designs 07 00007 v2Documento22 pagineDesigns 07 00007 v2akhilesh120100% (1)
- 24 Sample ChapterDocumento14 pagine24 Sample ChapterRomyMohanNessuna valutazione finora
- Notes MechV PDFDocumento21 pagineNotes MechV PDFzamburittiNessuna valutazione finora
- Vibration Analysis in Reciprocating CompressorsDocumento11 pagineVibration Analysis in Reciprocating Compressorsakamalapuri388Nessuna valutazione finora
- PDS STAAD Advanced Concrete Design LTR EN LR PDFDocumento2 paginePDS STAAD Advanced Concrete Design LTR EN LR PDFSYED FAROOQUDDINNessuna valutazione finora
- Outokumpu Steel Grades Properties Global StandardsDocumento20 pagineOutokumpu Steel Grades Properties Global StandardsLance BlackstarNessuna valutazione finora
- 7 Introduce Tekla Open API PDFDocumento34 pagine7 Introduce Tekla Open API PDFakhilesh120Nessuna valutazione finora
- ReinforcedConcreteBuildingModelingbyStaad ProExample 1Documento7 pagineReinforcedConcreteBuildingModelingbyStaad ProExample 1akhilesh120Nessuna valutazione finora
- 06 Eurocodes Steel Workshop WALDDocumento136 pagine06 Eurocodes Steel Workshop WALDIonut SavaNessuna valutazione finora
- Vibration Analysis in Reciprocating CompressorsDocumento11 pagineVibration Analysis in Reciprocating Compressorsakamalapuri388Nessuna valutazione finora
- Acoustic Applications in Mechanical Engineering:: Structure-Borne Sound Versus Air-Borne SoundDocumento0 pagineAcoustic Applications in Mechanical Engineering:: Structure-Borne Sound Versus Air-Borne SoundArturas TadzNessuna valutazione finora
- 14 S06-016Documento9 pagine14 S06-016akhilesh120Nessuna valutazione finora
- 7-75-0027 Rev 5 PDFDocumento1 pagina7-75-0027 Rev 5 PDFakhilesh120Nessuna valutazione finora
- Excel Detail DesignDocumento7 pagineExcel Detail DesignKishore KrishnanNessuna valutazione finora
- Mechanical Vibrations Lecture NotesDocumento133 pagineMechanical Vibrations Lecture NotesHarrison AdemuNessuna valutazione finora
- Vibration Analysis in Reciprocating CompressorsDocumento11 pagineVibration Analysis in Reciprocating Compressorsakamalapuri388Nessuna valutazione finora
- Automation of Design Process Using Etabs, Microsoft Excel and AutoCADDocumento13 pagineAutomation of Design Process Using Etabs, Microsoft Excel and AutoCADakhilesh120Nessuna valutazione finora
- Declare OpenSTAADDocumento34 pagineDeclare OpenSTAADAnonymous JZFSB3DNessuna valutazione finora
- Analysis and Design of RC BeamDocumento6 pagineAnalysis and Design of RC Beamakhilesh120Nessuna valutazione finora
- Analysis and Design of Reinforced Concrete Beams and Columns Using Open STAADDocumento6 pagineAnalysis and Design of Reinforced Concrete Beams and Columns Using Open STAADAnuj ChaudharyNessuna valutazione finora
- Force and Bending MomentDocumento115 pagineForce and Bending MomentMani KrishnaNessuna valutazione finora
- A Decision Support Tool For Predicting The Impact of Development Process ImprovementsDocumento25 pagineA Decision Support Tool For Predicting The Impact of Development Process Improvementsakhilesh120Nessuna valutazione finora
- Get Max Bending MomentDocumento1 paginaGet Max Bending Momentakhilesh120Nessuna valutazione finora
- Pds Staadpro LTR 0617 HR FDocumento2 paginePds Staadpro LTR 0617 HR FMassa SebatianNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Sofiload 1Documento254 pagineSofiload 1Chris LumyNessuna valutazione finora
- Integrated Approach To Concrete DesignDocumento64 pagineIntegrated Approach To Concrete DesignJason GuzmanNessuna valutazione finora
- ABES UK Company PresentationDocumento62 pagineABES UK Company PresentationKrystian TomakaNessuna valutazione finora
- Company SNP (Eng) - Color - 1-6-61Documento95 pagineCompany SNP (Eng) - Color - 1-6-61imzee25Nessuna valutazione finora
- Epoxy Jointing of Concrete Bridge SegmentsDocumento8 pagineEpoxy Jointing of Concrete Bridge SegmentscevivektNessuna valutazione finora
- A-Frame Rocker Bearing Replacement at Humber Bridge, UK: Volume 169 Issue CE3Documento8 pagineA-Frame Rocker Bearing Replacement at Humber Bridge, UK: Volume 169 Issue CE3tth28288969Nessuna valutazione finora
- NBC Structure DesignDocumento33 pagineNBC Structure DesignShivani VermaNessuna valutazione finora
- End Block Design of PSCDocumento33 pagineEnd Block Design of PSCAnonymous KyLhn6100% (1)
- Seismic Behaviour PSC Box Girder and PSC Precast I Girder BridgeDocumento10 pagineSeismic Behaviour PSC Box Girder and PSC Precast I Girder BridgeIJRASETPublicationsNessuna valutazione finora
- Design Basis Report-Nh208Documento19 pagineDesign Basis Report-Nh208Atanu AdhiakryNessuna valutazione finora
- Eriksson Stability of Girders Presentation Aug 2015 DistibutionDocumento36 pagineEriksson Stability of Girders Presentation Aug 2015 DistibutionsamNessuna valutazione finora
- Construction of Hyderabad Metro Rail STRDocumento54 pagineConstruction of Hyderabad Metro Rail STRSrinivas Mohan100% (1)
- Prestressed Concrete UIT RGPV Previous PapersDocumento7 paginePrestressed Concrete UIT RGPV Previous PapersDanish KhanNessuna valutazione finora
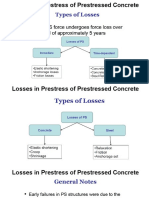
- Losses in PrestressDocumento38 pagineLosses in PrestressKausalya PurushothamanNessuna valutazione finora
- Set 8-3 PDFDocumento56 pagineSet 8-3 PDFAek JayNessuna valutazione finora
- Materials Inspection ManualDocumento280 pagineMaterials Inspection ManualSreedhar Patnaik.MNessuna valutazione finora
- Technical Specificationssec.2Documento137 pagineTechnical Specificationssec.2Faikar Luthfi AndrishaNessuna valutazione finora
- Losses in Prestress of Prestressed ConcreteDocumento19 pagineLosses in Prestress of Prestressed ConcreteswathiNessuna valutazione finora
- 1 Lecture 4: Post-Tensioning Systems and Devices: ECE 411 Design of Concrete Structures II Dr. Moonis ZaheerDocumento11 pagine1 Lecture 4: Post-Tensioning Systems and Devices: ECE 411 Design of Concrete Structures II Dr. Moonis ZaheerGhansham Rajaram Avhad.Nessuna valutazione finora
- Module Iii - Elastic Design of PrestressedDocumento28 pagineModule Iii - Elastic Design of PrestressedJonas Fernandez100% (2)
- Principle of ReinforcedPrestressed Concrete-Lesson 1Documento7 paginePrinciple of ReinforcedPrestressed Concrete-Lesson 1Aeron Dave LopezNessuna valutazione finora
- MIDAS Civil 2013 Analysis ReferenceDocumento400 pagineMIDAS Civil 2013 Analysis ReferenceFernando Viloria0% (1)
- AxsonDocumento104 pagineAxsonAnonymous LUl8E8eemNessuna valutazione finora
- BBR Technical From 2012 To 2017 PDFDocumento49 pagineBBR Technical From 2012 To 2017 PDFsivasankar reddyNessuna valutazione finora
- 2020 03 23 Scheme - Supporting Information - Final - V1.0Documento47 pagine2020 03 23 Scheme - Supporting Information - Final - V1.0_ARCUL_Nessuna valutazione finora
- Notes On Pre-Stressed Concrete.Documento10 pagineNotes On Pre-Stressed Concrete.Chetan ToliaNessuna valutazione finora
- Post Tensioned Box Girder Design Manual (3) (001-200)Documento200 paginePost Tensioned Box Girder Design Manual (3) (001-200)Saputra ErwanNessuna valutazione finora
- Structural ReviewerDocumento71 pagineStructural ReviewerMark Anthony MalateNessuna valutazione finora
- Strucsyll PDFDocumento44 pagineStrucsyll PDFaishwarya biradarNessuna valutazione finora
- BE - Civil - 8th Sem - SyllabusDocumento22 pagineBE - Civil - 8th Sem - SyllabusbhaskarNessuna valutazione finora