Potrebbero piacerti anche
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Cambridge International AS & A Level: PHYSICS 9702/23Documento16 pagineCambridge International AS & A Level: PHYSICS 9702/23jamalNessuna valutazione finora
- Physics Grade 8Documento176 paginePhysics Grade 8Hirko BelayNessuna valutazione finora
- VT Level III Study NoteDocumento5 pagineVT Level III Study NoteAllen Situ100% (3)
- Stan Meyer Bifilar ChokesDocumento9 pagineStan Meyer Bifilar ChokestezscribdNessuna valutazione finora
- KZ2 Diodo ZennerDocumento4 pagineKZ2 Diodo ZennerADSPPANessuna valutazione finora
- Atoms From The Eyes of Philosophers and ScientistDocumento32 pagineAtoms From The Eyes of Philosophers and ScientistDonita BinayNessuna valutazione finora
- Evaluation of Voronoi Meshes For Large Eddy Simulations of High Lift AerodynamicsDocumento24 pagineEvaluation of Voronoi Meshes For Large Eddy Simulations of High Lift AerodynamicszstrattoNessuna valutazione finora
- Electricity: By: Saurabh SinghDocumento15 pagineElectricity: By: Saurabh SinghSaurabh SinghNessuna valutazione finora
- Deflection of Beams: 8.1 BasicsDocumento1 paginaDeflection of Beams: 8.1 BasicsAGEGTAMNessuna valutazione finora
- Altium WP DC Analysis of A PDNDocumento12 pagineAltium WP DC Analysis of A PDNaafeletronicaNessuna valutazione finora
- Ionization Energy Electron Affinity and Atomic RadiusDocumento25 pagineIonization Energy Electron Affinity and Atomic RadiusMr. CrustNessuna valutazione finora
- Electrical Measuring Instruments: (Voltmeter, Ammeter, and Ohmmeter)Documento4 pagineElectrical Measuring Instruments: (Voltmeter, Ammeter, and Ohmmeter)angelo macatangayNessuna valutazione finora
- Physics 11-08 Interference, Huygenss Principle, Youngs Double Slit ExperimentDocumento2 paginePhysics 11-08 Interference, Huygenss Principle, Youngs Double Slit Experimentmechanical_lecturerNessuna valutazione finora
- Science P5 Revision Unit 19Documento6 pagineScience P5 Revision Unit 19starsschooljktNessuna valutazione finora
- Settlement of Shallow Foundation 2013Documento154 pagineSettlement of Shallow Foundation 2013Dita Fitri100% (1)
- Knots and Quantum GravityDocumento241 pagineKnots and Quantum Gravityabdelrahman_elabany100% (2)
- Analysis of Offshore Pipeline Allowable Free Span LengthDocumento8 pagineAnalysis of Offshore Pipeline Allowable Free Span Lengtholin93Nessuna valutazione finora
- SRU SCHEDULE AND ACOUSTIC SELECTION Rev 00 16-05-2016Documento18 pagineSRU SCHEDULE AND ACOUSTIC SELECTION Rev 00 16-05-2016AslamNessuna valutazione finora
- Padhye Rsi 2016 PDFDocumento24 paginePadhye Rsi 2016 PDFsabaris ksNessuna valutazione finora
- Chapter 01 PP Xii PhysicsDocumento4 pagineChapter 01 PP Xii Physicsstudywithak77Nessuna valutazione finora
- Insolation and Heat Balance of The EarthDocumento10 pagineInsolation and Heat Balance of The EarthDevraj H SNessuna valutazione finora
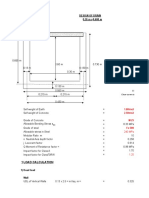
- Design of Drain 0.30 M X 0.600 M: 1 Load CalculationDocumento68 pagineDesign of Drain 0.30 M X 0.600 M: 1 Load CalculationAnil SuryawanshiNessuna valutazione finora
- Presentasi Elmag Garis IntegralDocumento13 paginePresentasi Elmag Garis IntegralMuhammad Lutfi HidayatNessuna valutazione finora
- L3-BEKG2433-Three Phase Part 2 PDFDocumento9 pagineL3-BEKG2433-Three Phase Part 2 PDFVievie Le BluewberrietrufflesNessuna valutazione finora
- Microwave Optics (3) : Sleman Nabeel Sa'adDocumento6 pagineMicrowave Optics (3) : Sleman Nabeel Sa'adSleman SaadNessuna valutazione finora
- Energy in A Collision Practice QuestionsDocumento6 pagineEnergy in A Collision Practice Questionsrana elshaNessuna valutazione finora
- Calculations Reference ManualDocumento122 pagineCalculations Reference ManualjujuroyaleNessuna valutazione finora
- Scientificamerican1274 32Documento12 pagineScientificamerican1274 32Eigermann EternalNessuna valutazione finora
- Ee0301 Electrical and Electronics MeasurementsDocumento8 pagineEe0301 Electrical and Electronics MeasurementsMaruthu Pandian50% (2)
- Axial Flux Permanent Magnet Generators For Pico-HydropowerDocumento8 pagineAxial Flux Permanent Magnet Generators For Pico-HydropowerEngineers Without Borders UKNessuna valutazione finora