Potrebbero piacerti anche
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Unit - Viii The AVR RISC Microcontroller's ArchitectureDocumento9 pagineUnit - Viii The AVR RISC Microcontroller's ArchitectureTechnoGateKhammamNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Unit-V Communication Interface Basics of Serial CommunicationDocumento16 pagineUnit-V Communication Interface Basics of Serial CommunicationTechnoGateKhammamNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- Unit-Vi Introduction To MicrocontrollersDocumento13 pagineUnit-Vi Introduction To MicrocontrollersTechnoGateKhammamNessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- MP I Course File Unit-IDocumento55 pagineMP I Course File Unit-ITechnoGateKhammamNessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- EE SyllabusDocumento2 pagineEE SyllabusTechnoGateKhammamNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Name: College Name: Mobile No.: Email IdDocumento3 pagineName: College Name: Mobile No.: Email IdTechnoGateKhammamNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Name: College Name: Mobile No.: Email IdDocumento3 pagineName: College Name: Mobile No.: Email IdTechnoGateKhammamNessuna valutazione finora
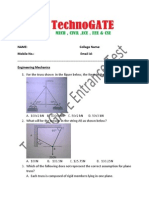
- Name: College Name: Mobile No.: Email Id: . Engineering MechanicsDocumento6 pagineName: College Name: Mobile No.: Email Id: . Engineering MechanicsTechnoGateKhammamNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- EBS Integration Pre-Requisitesv1.1Documento7 pagineEBS Integration Pre-Requisitesv1.1prakash9565Nessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- JBNKJDocumento186 pagineJBNKJNataliaNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- DVMEGA BlueDV ManualDocumento3 pagineDVMEGA BlueDV ManualStar RibeiroNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Process Concept Process Scheduling Operations On Processes Cooperating Processes Interprocess Communication Communication in Client-Server SystemsDocumento38 pagineProcess Concept Process Scheduling Operations On Processes Cooperating Processes Interprocess Communication Communication in Client-Server SystemsFarooq ShadNessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Welding Calculation: Job No. Job: Section: Designed By: Sheet No. Subject: DateDocumento37 pagineWelding Calculation: Job No. Job: Section: Designed By: Sheet No. Subject: DateMatthew CHANNessuna valutazione finora
- ReadmefirstaaaaDocumento8 pagineReadmefirstaaaaTarun CousikNessuna valutazione finora
- March 2015, HONNA Quarterly NewsletterDocumento40 pagineMarch 2015, HONNA Quarterly NewsletterHistoric Old Northeast Neighborhood AssociationNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- DS TM 3000 Chassis B-1Documento2 pagineDS TM 3000 Chassis B-1gmtoastNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- QoS Practice Labs - EnglishDocumento65 pagineQoS Practice Labs - EnglishnguyenquocxaNessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- zOS Installation Configuration GuideDocumento31 paginezOS Installation Configuration GuideSunny InfinityNessuna valutazione finora
- Mongo DBDocumento8 pagineMongo DBGauravNessuna valutazione finora
- Sri Computers 7Documento3 pagineSri Computers 7Zainol Azhar AliNessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Ec 2203 Digital ElectronicsDocumento1 paginaEc 2203 Digital ElectronicsMaheswaran UmaiyorupaganNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1091)
- PDS - AFTEK Flex-Pro PU Sealant PDFDocumento4 paginePDS - AFTEK Flex-Pro PU Sealant PDFLexyNessuna valutazione finora
- Steel Arch Bridge Construction 12Documento18 pagineSteel Arch Bridge Construction 12Tfk BajaNessuna valutazione finora
- Q13 Q14 Q15Documento2 pagineQ13 Q14 Q15Rhou Ian Aycardo PigtainNessuna valutazione finora
- L5 Hedgehog HomesDocumento4 pagineL5 Hedgehog HomesToha PutraNessuna valutazione finora
- 3G BasicsDocumento86 pagine3G BasicsAshit SinghNessuna valutazione finora
- Report of Telephone Directory ProjectDocumento20 pagineReport of Telephone Directory Projectsimorge86% (7)
- EN25F80 8 Megabit Serial Flash Memory With 4kbytes Uniform SectorDocumento32 pagineEN25F80 8 Megabit Serial Flash Memory With 4kbytes Uniform SectoradyanNessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Public Class: Singleton, Prototype, Request, Session and Global SessionDocumento6 paginePublic Class: Singleton, Prototype, Request, Session and Global SessionAshihsNessuna valutazione finora
- Microsoft Test ManagerDocumento19 pagineMicrosoft Test Managerrichagarg2909Nessuna valutazione finora
- JBASE Transaction JournallingDocumento53 pagineJBASE Transaction Journallinggnana_sam100% (1)
- Second Floor Plan 2: 2015-4-0653 AUGUST 31, 2019 Ambassador'S House Design - 5Documento1 paginaSecond Floor Plan 2: 2015-4-0653 AUGUST 31, 2019 Ambassador'S House Design - 5Stephen Mark Garcellano DalisayNessuna valutazione finora
- The Java Persistence API - A Simpler Programming Model For Entity PersistenceDocumento9 pagineThe Java Persistence API - A Simpler Programming Model For Entity PersistenceJuan Ángel García PenaNessuna valutazione finora
- Vijay SonawaneDocumento3 pagineVijay Sonawanevijaysonawane11Nessuna valutazione finora
- IPU MCA Advance Computer Network Unit-1Documento123 pagineIPU MCA Advance Computer Network Unit-1Vaibhav JainNessuna valutazione finora
- MashupDocumento60 pagineMashuparnitha_akhilaNessuna valutazione finora
- DL-T 5358-2006 Technical Code For Anticorrosion of Metal Structures in Hydroelectric and Hydraulic EngineeringDocumento43 pagineDL-T 5358-2006 Technical Code For Anticorrosion of Metal Structures in Hydroelectric and Hydraulic Engineeringsaliyarumesh2292Nessuna valutazione finora
- Atlantic - Artisan - Odyssee - Rio - Operating ManualDocumento8 pagineAtlantic - Artisan - Odyssee - Rio - Operating ManualRamakrishnan RamachandranNessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)