Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Copper Wire Install StandardDocumento70 pagineCopper Wire Install Standardcharlesc5746100% (1)
- Techinical Information Handbook Wire and Cable PDFDocumento328 pagineTechinical Information Handbook Wire and Cable PDFctsak83% (6)
- Techinical Information Handbook Wire and Cable PDFDocumento328 pagineTechinical Information Handbook Wire and Cable PDFctsak83% (6)
- Electrical Measurement & InstrumentationDocumento462 pagineElectrical Measurement & InstrumentationEr. Amar Kumar86% (7)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Neca200 10 PDocumento30 pagineNeca200 10 Pcharlesc5746Nessuna valutazione finora
- 003 IP PracticeExamDocumento29 pagine003 IP PracticeExamdeerfielddevo100% (1)
- Motor of Pump HandbookDocumento252 pagineMotor of Pump Handbookhithr1Nessuna valutazione finora
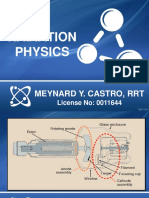
- Radiation Physics: Meynard Y. Castro, RRTDocumento84 pagineRadiation Physics: Meynard Y. Castro, RRTCyrlle Miranda100% (1)
- Exam... Electrical Machnes-IDocumento31 pagineExam... Electrical Machnes-Icharlesc5746Nessuna valutazione finora
- Setting Out Circular CurvesDocumento21 pagineSetting Out Circular CurvesvpmohammedNessuna valutazione finora
- Gas ChromatographyDocumento6 pagineGas ChromatographyPriyank ShahNessuna valutazione finora
- Geometry For High Speed RailwaysDocumento17 pagineGeometry For High Speed RailwaysRajesh Paralkar100% (1)
- Einstein, Albert - A New Determination of Molecular Dimensions - 1905Documento16 pagineEinstein, Albert - A New Determination of Molecular Dimensions - 1905nicopanzNessuna valutazione finora
- Lesson 1: How Does The Concept of Atomic Number Led To The Sysnthesis of New Elements in The LaboratoryDocumento17 pagineLesson 1: How Does The Concept of Atomic Number Led To The Sysnthesis of New Elements in The LaboratoryAngelica Bag-ao100% (1)
- Schneider QA QCDocumento64 pagineSchneider QA QCcharlesc5746Nessuna valutazione finora
- Chapter 14 - Axonometric ProjectionDocumento38 pagineChapter 14 - Axonometric Projectioncharlesc5746Nessuna valutazione finora
- Busbar Scheme (Siemens)Documento78 pagineBusbar Scheme (Siemens)Hanis Halim100% (1)
- 1912 Electrical WorkerDocumento440 pagine1912 Electrical Workercharlesc5746Nessuna valutazione finora
- Introduction to Symmetrical Components and Fault AnalysisDocumento66 pagineIntroduction to Symmetrical Components and Fault AnalysisbajricaNessuna valutazione finora
- CanSIA Course - Solar PV and The Electrical CodeDocumento61 pagineCanSIA Course - Solar PV and The Electrical Codeppeikos100% (1)
- Electrical Receptical FiresDocumento346 pagineElectrical Receptical Firescharlesc5746Nessuna valutazione finora
- Single Phase Rectifier GuideDocumento22 pagineSingle Phase Rectifier Guidecharlesc5746Nessuna valutazione finora
- An Introduction To Cathodic Protection PDFDocumento23 pagineAn Introduction To Cathodic Protection PDFMatt AgonyaNessuna valutazione finora
- Control FundamentalsDocumento34 pagineControl Fundamentalscharlesc5746Nessuna valutazione finora
- Control FundamentalsDocumento34 pagineControl Fundamentalscharlesc5746Nessuna valutazione finora
- Catalog Schneider 2012Documento290 pagineCatalog Schneider 2012hiwaters100% (1)
- 046 OutlineDocumento60 pagine046 Outlinecharlesc5746Nessuna valutazione finora
- Hospital Recept TestsDocumento24 pagineHospital Recept Testscharlesc5746Nessuna valutazione finora
- Honeywell VFDDocumento54 pagineHoneywell VFDcharlesc5746Nessuna valutazione finora
- KMAT ReportDocumento40 pagineKMAT Reportcharlesc5746Nessuna valutazione finora
- 04 27 2012 Ferc Nerc ReportDocumento153 pagine04 27 2012 Ferc Nerc Reportcharlesc5746100% (1)
- Ar Motor 01Documento7 pagineAr Motor 01charlesc5746Nessuna valutazione finora
- EHRC Case Studies Supporting Line Trade Development Refresher Training ProjectDocumento21 pagineEHRC Case Studies Supporting Line Trade Development Refresher Training Projectcharlesc5746Nessuna valutazione finora
- 021 OutlineDocumento36 pagine021 Outlinecharlesc5746Nessuna valutazione finora
- The Speed of Light and The Index of RefractionDocumento13 pagineThe Speed of Light and The Index of RefractionFaith MagluyanNessuna valutazione finora
- De Thi ThuDocumento8 pagineDe Thi ThuQuynh TrangNessuna valutazione finora
- Java Metode Gauss JordanDocumento7 pagineJava Metode Gauss JordanAriga IrantoNessuna valutazione finora
- Mikavukasaragod Physics PDFDocumento148 pagineMikavukasaragod Physics PDFRaj SinhaNessuna valutazione finora
- Transformations (Solution)Documento12 pagineTransformations (Solution)Amman ButtNessuna valutazione finora
- (Springer Series in Surface Sciences 23) C. Klauber, R. St. C. Smart (Auth.), Associate Professor D. John O'Connor, Dr. Brett A. Sexton, Professor Roger St. C. Smart (Eds.) - Surface Analysis MethodsDocumento457 pagine(Springer Series in Surface Sciences 23) C. Klauber, R. St. C. Smart (Auth.), Associate Professor D. John O'Connor, Dr. Brett A. Sexton, Professor Roger St. C. Smart (Eds.) - Surface Analysis MethodsShekhar DewanganNessuna valutazione finora
- Docc 1981Documento6 pagineDocc 1981swchenNessuna valutazione finora
- Dynamics of Rigid BodiesDocumento14 pagineDynamics of Rigid BodiescharespiadalcordoNessuna valutazione finora
- 45prox Xs CapDocumento4 pagine45prox Xs CapEraldo AraújoNessuna valutazione finora
- Zinc Chloride Lab Report FeedbackDocumento2 pagineZinc Chloride Lab Report FeedbackaggieNessuna valutazione finora
- CHP 2 Electric PotentialDocumento21 pagineCHP 2 Electric PotentialSyahshaiNessuna valutazione finora
- Ch2 Chem FINALDocumento38 pagineCh2 Chem FINALYossef AmrNessuna valutazione finora
- First Semester Engineering Degree Examination: Subject Title 21PHY12/22Documento3 pagineFirst Semester Engineering Degree Examination: Subject Title 21PHY12/22Nanditha ONessuna valutazione finora
- Chromatographic Techniques WORDDocumento56 pagineChromatographic Techniques WORDhelion45Nessuna valutazione finora
- 6-Introduction To Convection PDFDocumento0 pagine6-Introduction To Convection PDFodim73Nessuna valutazione finora
- Angular momentum of rod about hinged end when vertical = ml√glHence, the correct option is 1Documento60 pagineAngular momentum of rod about hinged end when vertical = ml√glHence, the correct option is 1Swaran GhoshalNessuna valutazione finora
- Ch01 1Documento33 pagineCh01 1Sumihar SimangunsongNessuna valutazione finora
- Liquid CrystalDocumento31 pagineLiquid Crystalrajtripathi0305Nessuna valutazione finora
- Light absorption of iron thiocyanate complexDocumento5 pagineLight absorption of iron thiocyanate complexErnesto LecuonaNessuna valutazione finora
- The PENCIL Inspired by Ohm Micro Walsh TallDocumento48 pagineThe PENCIL Inspired by Ohm Micro Walsh TallJinu JacobNessuna valutazione finora
- The Bernoulli Equation & Crocco’s TheoremDocumento4 pagineThe Bernoulli Equation & Crocco’s TheoremJohn BirdNessuna valutazione finora
- Grade 5forces and MotionDocumento4 pagineGrade 5forces and MotionCherry Amor Betita MadronaNessuna valutazione finora
- Chaos in Electronics (Part 2)Documento138 pagineChaos in Electronics (Part 2)SnoopyDoopyNessuna valutazione finora
- FERRATE IRON (Fe6+) AS AN ALTERNATIVE METHOD FORDocumento113 pagineFERRATE IRON (Fe6+) AS AN ALTERNATIVE METHOD FORed caronte elricNessuna valutazione finora