Potrebbero piacerti anche
- Design and Test Strategies for 2D/3D Integration for NoC-based Multicore ArchitecturesDa EverandDesign and Test Strategies for 2D/3D Integration for NoC-based Multicore ArchitecturesNessuna valutazione finora
- Application-Aware Topology Reconfiguration For On-Chip NetworksDocumento13 pagineApplication-Aware Topology Reconfiguration For On-Chip NetworksSrivalli MurthyNessuna valutazione finora
- Compare Performance of 2D and 3D Mesh Architectures in Network-On-ChipDocumento5 pagineCompare Performance of 2D and 3D Mesh Architectures in Network-On-ChipJournal of ComputingNessuna valutazione finora
- Performance Comparison of 2D and 3D Torus Network-on-Chip ArchitecturesDocumento4 paginePerformance Comparison of 2D and 3D Torus Network-on-Chip ArchitecturesJournal of ComputingNessuna valutazione finora
- Comparative Analysis of Different Topologies Based On Network-on-Chip ArchitecturesDocumento6 pagineComparative Analysis of Different Topologies Based On Network-on-Chip ArchitecturesIJERDNessuna valutazione finora
- 1 s2.0 S0142061523002600 MainDocumento10 pagine1 s2.0 S0142061523002600 Maintonmoy hossainNessuna valutazione finora
- Communication Centric Oorplanning of Noc Based System On ChipDocumento10 pagineCommunication Centric Oorplanning of Noc Based System On ChipVENKATRAMANNessuna valutazione finora
- PDP10 PrefetchingDocumento8 paginePDP10 PrefetchingantoniofloresgilNessuna valutazione finora
- NoC Architecture OverviewDocumento5 pagineNoC Architecture OverviewMitali DixitNessuna valutazione finora
- Noc Topologies01Documento16 pagineNoc Topologies01Alex HillNessuna valutazione finora
- Mira PDFDocumento11 pagineMira PDFCecilia ChinnaNessuna valutazione finora
- SDN Based Optimal User Cooperation and Energy Efficient Resource Allocation in Cloud Assisted Heterogeneous NetworksDocumento13 pagineSDN Based Optimal User Cooperation and Energy Efficient Resource Allocation in Cloud Assisted Heterogeneous NetworksElham AbbasiNessuna valutazione finora
- 16 Dynamic FullDocumento14 pagine16 Dynamic FullTJPRC PublicationsNessuna valutazione finora
- 2.06095515-Compiler-Directed Energy Reduction Using Dynamic Voltage Scaling and Voltage Islands For Embedded SystemsDocumento11 pagine2.06095515-Compiler-Directed Energy Reduction Using Dynamic Voltage Scaling and Voltage Islands For Embedded SystemsPhan Giang ChâuNessuna valutazione finora
- No Care A PowerDocumento7 pagineNo Care A PowerVenkateswararao MusalaNessuna valutazione finora
- Mapping Cores On Network-on-Chip: ° Research India Publications HTTP://WWW - Ijcir.infoDocumento18 pagineMapping Cores On Network-on-Chip: ° Research India Publications HTTP://WWW - Ijcir.infoHerdawati TiansinNessuna valutazione finora
- Part Time Optics in Data CenterDocumento12 paginePart Time Optics in Data CenterVivekNessuna valutazione finora
- FPGA Implementation ON-Chip Communication Using Implementation of 9 Port Router For Ommunication Using V Outer For 3D VerilogDocumento6 pagineFPGA Implementation ON-Chip Communication Using Implementation of 9 Port Router For Ommunication Using V Outer For 3D VerilogPraveen Kumar RNessuna valutazione finora
- Power and Area Efficient VLSI Architectures For Communication Signal ProcessingDocumento6 paginePower and Area Efficient VLSI Architectures For Communication Signal Processingsushmitha0127Nessuna valutazione finora
- Frame Work For DesignexpDocumento15 pagineFrame Work For DesignexplokeshNessuna valutazione finora
- Performance Comparison of 3D-Mesh and 3D-Torus Network-on-ChipDocumento5 paginePerformance Comparison of 3D-Mesh and 3D-Torus Network-on-ChipJournal of ComputingNessuna valutazione finora
- DEMAP: Differential Evolution Mapping For Network On Chip OptimizationDocumento11 pagineDEMAP: Differential Evolution Mapping For Network On Chip OptimizationIAES International Journal of Robotics and AutomationNessuna valutazione finora
- Prediction and Comparison of High-Performance On-Chip Global InterconnectionDocumento13 paginePrediction and Comparison of High-Performance On-Chip Global InterconnectionVimala PriyaNessuna valutazione finora
- Project Synopsis on TITLE OF PROJECT: MiX-Mac: An Energy Efficient MAC Protocol for Wireless Sensor NetworksDocumento6 pagineProject Synopsis on TITLE OF PROJECT: MiX-Mac: An Energy Efficient MAC Protocol for Wireless Sensor Networksgarry1304Nessuna valutazione finora
- Wireless Network Clustering with Genetic AlgorithmsDocumento5 pagineWireless Network Clustering with Genetic AlgorithmsMujeeb AbdullahNessuna valutazione finora
- NOC Issues and ChallengesDocumento3 pagineNOC Issues and ChallengesMehul_Singh_7900Nessuna valutazione finora
- Race Logic: A Hardware Acceleration For Dynamic Programming AlgorithmsDocumento12 pagineRace Logic: A Hardware Acceleration For Dynamic Programming AlgorithmsssfofoNessuna valutazione finora
- Ijesrt: Performance Analysis of An Noc For Multiprocessor SocDocumento5 pagineIjesrt: Performance Analysis of An Noc For Multiprocessor SocRajesh UpadhyayNessuna valutazione finora
- 2 - Performance - Analysis - of - Fog-Based - Radio - Access - NetworksDocumento9 pagine2 - Performance - Analysis - of - Fog-Based - Radio - Access - NetworksElectro ElkoranyNessuna valutazione finora
- Power Aware Clock Tree PlanningDocumento10 paginePower Aware Clock Tree PlanningSishir SudabattulaNessuna valutazione finora
- Flat Ball Topology Based 2.5Tbps - 100km MultiTransceivers GDocumento14 pagineFlat Ball Topology Based 2.5Tbps - 100km MultiTransceivers GSinghshNessuna valutazione finora
- Cross-Layer Designs in Coded Wireless Fading Networks With MulticastDocumento14 pagineCross-Layer Designs in Coded Wireless Fading Networks With MulticastJesintha CharlesNessuna valutazione finora
- Flat Ball Topology Based 2.5Tbps/100km Multi-Transceivers Gigabit-Ethernet Passive Optical Network Architecture For Energy Management in Data CentersDocumento14 pagineFlat Ball Topology Based 2.5Tbps/100km Multi-Transceivers Gigabit-Ethernet Passive Optical Network Architecture For Energy Management in Data CentersSinghshNessuna valutazione finora
- Automated Wireless Coverage Optimization With Controlled OverlapDocumento9 pagineAutomated Wireless Coverage Optimization With Controlled OverlapislamNessuna valutazione finora
- A Cross-Layer Framework For Overhead Reduction, Traffic Scheduling, and Burst Allocation in IEEE 802.16 OFDMA NetworksDocumento16 pagineA Cross-Layer Framework For Overhead Reduction, Traffic Scheduling, and Burst Allocation in IEEE 802.16 OFDMA NetworksSenthilkumarNessuna valutazione finora
- Gwak 2019Documento16 pagineGwak 2019Yadesa BedasaNessuna valutazione finora
- Low Power DSP 1 TechDocumento4 pagineLow Power DSP 1 TechtheobrambaNessuna valutazione finora
- Joint Scheduling and Network Coding For Multicast in Delay-Constrained Wireless NetworksDocumento11 pagineJoint Scheduling and Network Coding For Multicast in Delay-Constrained Wireless NetworksSoumitra BhowmickNessuna valutazione finora
- Reducing Dynamic Energy in Networks On Chip: 1 Arley Villa Salazar 2 Gustavo Pati NoDocumento6 pagineReducing Dynamic Energy in Networks On Chip: 1 Arley Villa Salazar 2 Gustavo Pati NoARLEY FERNANDO VILLA SALAZARNessuna valutazione finora
- Network-On-Chip Architectures: MotivationDocumento3 pagineNetwork-On-Chip Architectures: MotivationManjunath HSNessuna valutazione finora
- Interleaved Edge Routing in Buffered 3D Mesh & Cmesh NocDocumento6 pagineInterleaved Edge Routing in Buffered 3D Mesh & Cmesh NocNEETHUNessuna valutazione finora
- 3D STCKD Nanoph NoC Arch W Min ReconfigDocumento13 pagine3D STCKD Nanoph NoC Arch W Min ReconfiglycankNessuna valutazione finora
- A Low-Power Reconfigurable Data-Flow Driven DSP System: Motivation and BackgroundDocumento10 pagineA Low-Power Reconfigurable Data-Flow Driven DSP System: Motivation and BackgroundChethan JayasimhaNessuna valutazione finora
- Slicing Resource AllocationDocumento11 pagineSlicing Resource AllocationAhmad JaradatNessuna valutazione finora
- Joint Aggregation and MAC Design To Prolong Sensor Network Lifetime - ICNP 2013Documento10 pagineJoint Aggregation and MAC Design To Prolong Sensor Network Lifetime - ICNP 2013NgocThanhDinhNessuna valutazione finora
- A Tutorial On Cross-Layer OptimizationDocumento12 pagineA Tutorial On Cross-Layer OptimizationSana JamilNessuna valutazione finora
- Variation Tolerant Clock Distribution Network For NomicroprocessorDocumento8 pagineVariation Tolerant Clock Distribution Network For NomicroprocessorKhadar BashaNessuna valutazione finora
- Differential Evolution (De) Algorithm To Optimize Berkeley - Mac Protocol For Wireless Sensor Network (WSN)Documento6 pagineDifferential Evolution (De) Algorithm To Optimize Berkeley - Mac Protocol For Wireless Sensor Network (WSN)wissemNessuna valutazione finora
- Differential Evolution (De) Algorithm To Optimize Berkeley - Mac Protocol For Wireless Sensor Network (WSN)Documento6 pagineDifferential Evolution (De) Algorithm To Optimize Berkeley - Mac Protocol For Wireless Sensor Network (WSN)wissemNessuna valutazione finora
- An Energy Efficient MAC Protocol Based On IEEE 802.11 in Wireless Ad Hoc Networks 2011 Annales Des Telecommunications Annals of TelecommunicationsDocumento12 pagineAn Energy Efficient MAC Protocol Based On IEEE 802.11 in Wireless Ad Hoc Networks 2011 Annales Des Telecommunications Annals of TelecommunicationsAmir Hossein YazdavarNessuna valutazione finora
- Applying Time-Division Multiplexing in Star-Based Optical NetworksDocumento4 pagineApplying Time-Division Multiplexing in Star-Based Optical NetworksJuliana CantilloNessuna valutazione finora
- Optimization Technique For Virtual Topology Reconfiguration For Ip-Over-Wdm Networks With Qos ParametersDocumento11 pagineOptimization Technique For Virtual Topology Reconfiguration For Ip-Over-Wdm Networks With Qos ParametersMuhammad Bilal IqbalNessuna valutazione finora
- Application of Parallel Tabu Search Distribution Network Expansion Planning Distributed GenerationDocumento6 pagineApplication of Parallel Tabu Search Distribution Network Expansion Planning Distributed Generationbluemoon1172Nessuna valutazione finora
- QoS and Error Control Techniques for Mesh-Based NoC ArchitecturesDocumento30 pagineQoS and Error Control Techniques for Mesh-Based NoC ArchitecturesSrinivas HnNessuna valutazione finora
- Optimal Routing and Data Aggregation For Maximizing Lifetime of Wireless Sensor NetworksDocumento12 pagineOptimal Routing and Data Aggregation For Maximizing Lifetime of Wireless Sensor NetworksivanNessuna valutazione finora
- Structured Pruning of Deep CNNs for Efficient InferenceDocumento11 pagineStructured Pruning of Deep CNNs for Efficient Inferenceali shaarawyNessuna valutazione finora
- Edge Computing-Enabled Cell-Free Massive MIMO SystemsDocumento16 pagineEdge Computing-Enabled Cell-Free Massive MIMO SystemsSurya Shekhar singh sssNessuna valutazione finora
- Transactions Letters: Efficient and Configurable Full-Search Block-Matching ProcessorsDocumento8 pagineTransactions Letters: Efficient and Configurable Full-Search Block-Matching ProcessorsrovillareNessuna valutazione finora
- Approximate NoC and Memory Controller Architectures for GPGPU AcceleratorsDocumento15 pagineApproximate NoC and Memory Controller Architectures for GPGPU AcceleratorsMiguel Ramírez CarrilloNessuna valutazione finora
- Reliability Analysis of Datacenter TopologiesDocumento6 pagineReliability Analysis of Datacenter TopologiesTarun SahuNessuna valutazione finora
- LP PSTDocumento23 pagineLP PSTpnrgoudNessuna valutazione finora
- Perl Coding Guidelines Version 1.0Documento12 paginePerl Coding Guidelines Version 1.0pnrgoudNessuna valutazione finora
- Verilog - Still in Love With My X PDFDocumento20 pagineVerilog - Still in Love With My X PDFpnrgoudNessuna valutazione finora
- SoC Design and Modelling Lecture NotesDocumento131 pagineSoC Design and Modelling Lecture NotesSambhav VermanNessuna valutazione finora
- Clock Domain Crossing (CDC)Documento39 pagineClock Domain Crossing (CDC)pnrgoud100% (1)
- Lint Elab RulesDocumento3 pagineLint Elab RulespnrgoudNessuna valutazione finora
- SoC Design and Modelling Lecture NotesDocumento131 pagineSoC Design and Modelling Lecture NotesSambhav VermanNessuna valutazione finora
- Perl BeginnersDocumento28 paginePerl BeginnerspnrgoudNessuna valutazione finora
- Perl Questions SybaseRaysDocumento13 paginePerl Questions SybaseRayshaibye424Nessuna valutazione finora
- Verilog - Still in Love With My X PDFDocumento20 pagineVerilog - Still in Love With My X PDFpnrgoudNessuna valutazione finora
- Lint Elab RulesDocumento3 pagineLint Elab RulespnrgoudNessuna valutazione finora
- Dangers of Living with an X in VerilogDocumento34 pagineDangers of Living with an X in VerilogpnrgoudNessuna valutazione finora
- Lint Elab RulesDocumento3 pagineLint Elab RulespnrgoudNessuna valutazione finora
- Usage Rules and Warnings for Verilog and VHDL CodeDocumento9 pagineUsage Rules and Warnings for Verilog and VHDL CodepnrgoudNessuna valutazione finora
- Sitting PositionDocumento1 paginaSitting PositionShivaNessuna valutazione finora
- System Bus NocDocumento102 pagineSystem Bus NocShubham DusadNessuna valutazione finora
- System Bus NocDocumento102 pagineSystem Bus NocShubham DusadNessuna valutazione finora
- Low Power Arch - MIT PDFDocumento64 pagineLow Power Arch - MIT PDFpnrgoudNessuna valutazione finora
- VW UVM Tutorial DVCon US 2016Documento59 pagineVW UVM Tutorial DVCon US 2016pnrgoudNessuna valutazione finora
- Ise Tutorial Ug695Documento150 pagineIse Tutorial Ug695Apurv SinghNessuna valutazione finora
- MSPHD Ordinances & Regulations 26-06-14Documento50 pagineMSPHD Ordinances & Regulations 26-06-14prabha_gahonNessuna valutazione finora
- How To Prepare ProposalDocumento55 pagineHow To Prepare Proposalpnrgoud100% (1)
- DRAM Circuit and Architecture Basics: Terminology Access Protocol ArchitectureDocumento32 pagineDRAM Circuit and Architecture Basics: Terminology Access Protocol ArchitecturepnrgoudNessuna valutazione finora
- Sitting PositionDocumento1 paginaSitting PositionShivaNessuna valutazione finora
- How To Prepare ProposalDocumento55 pagineHow To Prepare Proposalpnrgoud100% (1)
- How To Prepare ProposalDocumento55 pagineHow To Prepare Proposalpnrgoud100% (1)
- Pattern Recognition Letters: Mithilesh Kumar Jha, Sumantra Dutta Roy, Brejesh LallDocumento7 paginePattern Recognition Letters: Mithilesh Kumar Jha, Sumantra Dutta Roy, Brejesh LallpnrgoudNessuna valutazione finora
- Sitting PositionDocumento1 paginaSitting PositionShivaNessuna valutazione finora
- Clock Skew Minimization During FPGA PlacementDocumento6 pagineClock Skew Minimization During FPGA PlacementpnrgoudNessuna valutazione finora
- MSPHD Ordinances & Regulations 26-06-14Documento50 pagineMSPHD Ordinances & Regulations 26-06-14prabha_gahonNessuna valutazione finora
- Electrical Safety ChecklistDocumento2 pagineElectrical Safety ChecklistmailxzNessuna valutazione finora
- Manual MI 2893, MI 2892, MI 2885 - PowerMaster XT, Power Master, Master Q4 ANG Ver 1.2.2 20753179Documento242 pagineManual MI 2893, MI 2892, MI 2885 - PowerMaster XT, Power Master, Master Q4 ANG Ver 1.2.2 20753179Nhật Tân Nguyễn VănNessuna valutazione finora
- AN 005 Constellation Diagrams and How They Are Used1Documento8 pagineAN 005 Constellation Diagrams and How They Are Used1Hùng Nguyễn MạnhNessuna valutazione finora
- Circuit Diagram: ModelDocumento26 pagineCircuit Diagram: ModelOmar LugoNessuna valutazione finora
- Vme Bus: Starter KitDocumento2 pagineVme Bus: Starter Kitihab_abdullahNessuna valutazione finora
- Anexo 2. D103605X012 DVC6200 Instruction Manual PDFDocumento104 pagineAnexo 2. D103605X012 DVC6200 Instruction Manual PDFJairo andres Guarnizo SuarezNessuna valutazione finora
- Pallivasal Power Plant: Kerala's First Hydroelectric ProjectDocumento4 paginePallivasal Power Plant: Kerala's First Hydroelectric ProjectRinu JaisonNessuna valutazione finora
- AC Hipots 15-200kVDocumento4 pagineAC Hipots 15-200kVHung NguyenNessuna valutazione finora
- A Full-Bridge DC-DC Converter With Zero-Voltage-Switching Over The Entire Conversion RangeDocumento8 pagineA Full-Bridge DC-DC Converter With Zero-Voltage-Switching Over The Entire Conversion RangeNirmal mehtaNessuna valutazione finora
- Data Sheet For Variable Speed Drives of Medium and Large PowerDocumento6 pagineData Sheet For Variable Speed Drives of Medium and Large Powerbrome2014Nessuna valutazione finora
- Wi-Fi Router Huawei E5830 EngDocumento28 pagineWi-Fi Router Huawei E5830 EngMuhammad Ibnu Al KaffyNessuna valutazione finora
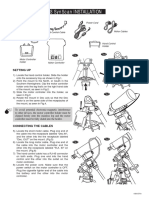
- EQ3 SynScan INSTALLATION guideDocumento1 paginaEQ3 SynScan INSTALLATION guideOscar MalamudNessuna valutazione finora
- Aloha For ClassDocumento23 pagineAloha For ClassetasureshNessuna valutazione finora
- MDCL For University-1 RTU560-07!05!2017 Latest TestedDocumento270 pagineMDCL For University-1 RTU560-07!05!2017 Latest TestedmaliktoqiNessuna valutazione finora
- 74HC14 PDFDocumento8 pagine74HC14 PDFNielsy R. Aparicio QuirogaNessuna valutazione finora
- Manual GodiagDocumento11 pagineManual GodiagEnrique GomezNessuna valutazione finora
- List Mode Guide PDFDocumento20 pagineList Mode Guide PDFsandeep yadavNessuna valutazione finora
- Energus Power Solutions Ltd. BMS Firmware Release NotesDocumento3 pagineEnergus Power Solutions Ltd. BMS Firmware Release NotesÁlvaro Satué CrespoNessuna valutazione finora
- Is 15652Documento3 pagineIs 15652IshanNessuna valutazione finora
- 1 11 12 13 14 21 22 23 24 25 31 Knock Sensor (KS) - Circuit Malfunction Wiring, KS, ECM 36 41 Injectors - Circuit Malfunction 44 52 53 54 55 59 61Documento3 pagine1 11 12 13 14 21 22 23 24 25 31 Knock Sensor (KS) - Circuit Malfunction Wiring, KS, ECM 36 41 Injectors - Circuit Malfunction 44 52 53 54 55 59 61Fajar DwiNessuna valutazione finora
- Spécifications Behringer+000+b0p01+Ppa200Documento1 paginaSpécifications Behringer+000+b0p01+Ppa200ZubNessuna valutazione finora
- Hot Rod III Deluxe and DeVille - Gamp - ManualDocumento28 pagineHot Rod III Deluxe and DeVille - Gamp - Manuala personNessuna valutazione finora
- Zc300 Specification SheetDocumento4 pagineZc300 Specification Sheetgroovey9040Nessuna valutazione finora
- Converter 156/04: User S ManualDocumento31 pagineConverter 156/04: User S ManualIlhami DemirNessuna valutazione finora
- Sam4s ER-380 Service ManualDocumento110 pagineSam4s ER-380 Service Manualsupport-43Nessuna valutazione finora
- SM3GZ47, SM3JZ47: Ac Power Control ApplicationsDocumento5 pagineSM3GZ47, SM3JZ47: Ac Power Control ApplicationsSergio BarbozaNessuna valutazione finora
- FacultyDocumento144 pagineFacultySesha SaiNessuna valutazione finora
- 8KV 500mA Ultra Fast Recovery High Voltage DiodeDocumento1 pagina8KV 500mA Ultra Fast Recovery High Voltage Diodeedilbertos_4Nessuna valutazione finora
- Low Cost PCO Billing Meter PDFDocumento1 paginaLow Cost PCO Billing Meter PDFShrivlsi RamNessuna valutazione finora
- Cost To Cost Pricelist PDFDocumento8 pagineCost To Cost Pricelist PDFDeepak NamdeoNessuna valutazione finora