Potrebbero piacerti anche
- Natural Stability and the Parachute Principle in AeroplanesDa EverandNatural Stability and the Parachute Principle in AeroplanesNessuna valutazione finora
- Task 1:: (Outcome:2)Documento14 pagineTask 1:: (Outcome:2)Rezve AhmedNessuna valutazione finora
- Chapter 3. Drag Force and Its Coefficient PDFDocumento41 pagineChapter 3. Drag Force and Its Coefficient PDFMaheshwaranNessuna valutazione finora
- Report On RC AeroplaneDocumento23 pagineReport On RC AeroplaneSandeep Kr. Mishra70% (10)
- Drag and Lift Reduction of A 3D Bluff-Body Using ADocumento20 pagineDrag and Lift Reduction of A 3D Bluff-Body Using AThuận NgôNessuna valutazione finora
- Landing Gear Layout DesignDocumento43 pagineLanding Gear Layout DesignVanCarot100% (1)
- Chapter 3. Drag Force and Its Coefficient - noPW PDFDocumento5 pagineChapter 3. Drag Force and Its Coefficient - noPW PDFashoku2Nessuna valutazione finora
- How Wingtip Devices Reduce Drag and Improve PerformanceDocumento20 pagineHow Wingtip Devices Reduce Drag and Improve PerformancezaheerkaranjiaNessuna valutazione finora
- Strip Theory (2 D Potential Theory)Documento8 pagineStrip Theory (2 D Potential Theory)Bilal MalikNessuna valutazione finora
- Design of Landing Gear Retraction System For UAV's: J. Sri Ram KumarDocumento4 pagineDesign of Landing Gear Retraction System For UAV's: J. Sri Ram KumarVigneshVickeyNessuna valutazione finora
- Modeling of The Underwater Airframe - Glider: Alexey V. CherkasovDocumento5 pagineModeling of The Underwater Airframe - Glider: Alexey V. CherkasovMuhammad Yasar JavaidNessuna valutazione finora
- Stress analysis of composite aircraft landing gear during rough landingsDocumento7 pagineStress analysis of composite aircraft landing gear during rough landingstruva_kissNessuna valutazione finora
- College of Engineering and Aeronautical TechnologyDocumento6 pagineCollege of Engineering and Aeronautical TechnologyJohnzen Kim BaluyotNessuna valutazione finora
- Drag and Lift Reduction of A 3D Bluff-Body Using Active Vortex GeneratorsDocumento20 pagineDrag and Lift Reduction of A 3D Bluff-Body Using Active Vortex GeneratorsAJ DNessuna valutazione finora
- FM 2e SI Chap11 LectureDocumento70 pagineFM 2e SI Chap11 Lecturesyafiq hashimNessuna valutazione finora
- Fluids Systems Practical File: Course OutcomesDocumento29 pagineFluids Systems Practical File: Course Outcomes2K18/ME/192 SANCHIT DHASMANANessuna valutazione finora
- (Class 19) Introduction To Aeronautical EngineeringDocumento48 pagine(Class 19) Introduction To Aeronautical EngineeringFabian Torres100% (2)
- HovercraftDocumento8 pagineHovercraftAnonymous e3ceN15Nessuna valutazione finora
- Fluid 09Documento190 pagineFluid 09Edgar HuancaNessuna valutazione finora
- Design and Optimization of a Crank-Based Leg MechanismDocumento172 pagineDesign and Optimization of a Crank-Based Leg MechanismgilbertofloresNessuna valutazione finora
- Aerodynamic Characteristics/ AimDocumento47 pagineAerodynamic Characteristics/ AimJarief Safawat FarabiNessuna valutazione finora
- Experimental Analysis of Treadmill Motion in The Upper Surface of The WingDocumento6 pagineExperimental Analysis of Treadmill Motion in The Upper Surface of The WingsuryaNessuna valutazione finora
- 1.1. General:: Design and Fabrication of Hydraulic Machine With Pulling and Bending OperationsDocumento48 pagine1.1. General:: Design and Fabrication of Hydraulic Machine With Pulling and Bending OperationssudheerNessuna valutazione finora
- Types of Drag on Aircraft ExplainedDocumento20 pagineTypes of Drag on Aircraft ExplainedPramod DhaigudeNessuna valutazione finora
- More Applications of The Momentum EquationDocumento8 pagineMore Applications of The Momentum EquationilhammkaNessuna valutazione finora
- Slats and FlapsDocumento14 pagineSlats and Flapspride3351100% (1)
- Fluid Sloshing in Diaphragm TanksDocumento11 pagineFluid Sloshing in Diaphragm TanksrenatobellarosaNessuna valutazione finora
- AUV Design Intelligent Vehicle Using Sensor Fusion Control SchemeDocumento4 pagineAUV Design Intelligent Vehicle Using Sensor Fusion Control SchemeSachin SharmaNessuna valutazione finora
- The Hovercraft Model NewDocumento3 pagineThe Hovercraft Model NewranaateeqNessuna valutazione finora
- Stage SeparationDocumento10 pagineStage SeparationJabez RichardsNessuna valutazione finora
- Coupled CFD and Structural Analysis For World Outright Sailing Speed Record PreparationsDocumento17 pagineCoupled CFD and Structural Analysis For World Outright Sailing Speed Record PreparationsLucas WeissNessuna valutazione finora
- APPLICATIONS OF DYNAMICS IN AUTOMOTIVE ENGINEERINGDocumento10 pagineAPPLICATIONS OF DYNAMICS IN AUTOMOTIVE ENGINEERINGUmar Ayaz0% (1)
- Aerodynamics of A Helicopter PPDocumento28 pagineAerodynamics of A Helicopter PPDarshak BhuptaniNessuna valutazione finora
- Estimating Vertical Drag On Helicopter Fuselage During HoveringDocumento7 pagineEstimating Vertical Drag On Helicopter Fuselage During HoveringPeter IjaramendiNessuna valutazione finora
- Propeller Theory ExplainedDocumento8 paginePropeller Theory ExplainedKushal SinghNessuna valutazione finora
- Ch10 SolutionskDocumento65 pagineCh10 SolutionskTensay FekedeNessuna valutazione finora
- Newapps BianDocumento9 pagineNewapps BianJanko MilišaNessuna valutazione finora
- The Personal Quadrotor Project Brief State Report: Jaromir Dvorak (Dvoraj13@fel - Cvut.cz) Horn I Cerekev, October 17, 2010Documento14 pagineThe Personal Quadrotor Project Brief State Report: Jaromir Dvorak (Dvoraj13@fel - Cvut.cz) Horn I Cerekev, October 17, 2010Hashem Mohamed HashemNessuna valutazione finora
- Ashish Bhateja, Nirmalpreet Singh , Sukhdarshan Singh and Ravinder Kumar “Design and Fabrication of a Model Radio Controlled -Air Cushion Vehicle Utilize a Combined Single Trust and Lift System With a Body Shape of Box Made Out of Thermocol and With a Skirt Made Out of Plastic”Documento10 pagineAshish Bhateja, Nirmalpreet Singh , Sukhdarshan Singh and Ravinder Kumar “Design and Fabrication of a Model Radio Controlled -Air Cushion Vehicle Utilize a Combined Single Trust and Lift System With a Body Shape of Box Made Out of Thermocol and With a Skirt Made Out of Plastic”Prof.Bhateja AshishNessuna valutazione finora
- General Loads On Aircraft StructureDocumento42 pagineGeneral Loads On Aircraft StructureSunil Panwar86% (7)
- Relatorio EstagioDocumento9 pagineRelatorio EstagiooldinaNessuna valutazione finora
- Experimental Buoyancy Control For A Spherical AuvDocumento11 pagineExperimental Buoyancy Control For A Spherical AuvMilan MarkovićNessuna valutazione finora
- Tandem Analysis Effects On Bluff Bodies AerodynamicsDocumento10 pagineTandem Analysis Effects On Bluff Bodies AerodynamicsInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Design and Analysis of Retractable Structure of NeDocumento9 pagineDesign and Analysis of Retractable Structure of NeBasavaraj G LNessuna valutazione finora
- Ot5304 Subsea Construction & Operational Support Assignment 1 Research of Autonomous Underwater Vehicles TechnologiesDocumento40 pagineOt5304 Subsea Construction & Operational Support Assignment 1 Research of Autonomous Underwater Vehicles TechnologiesWeilun OngNessuna valutazione finora
- Chapter-11Documento70 pagineChapter-11mambameyniNessuna valutazione finora
- Accelerometer: Physical PrinciplesDocumento7 pagineAccelerometer: Physical PrinciplesWaqas Siddiqui100% (1)
- Aerospace Engineering Is The Branch Of: Engineering Aircraft Spacecraft Aeronautical Astronautical Earth AtmosphereDocumento4 pagineAerospace Engineering Is The Branch Of: Engineering Aircraft Spacecraft Aeronautical Astronautical Earth Atmosphererobinston jeyasinghNessuna valutazione finora
- Hydraulic Bearing PullerDocumento23 pagineHydraulic Bearing Pullertechfi67% (6)
- lsa report final(1)Documento18 paginelsa report final(1)SUMITH NAIKNessuna valutazione finora
- A Heave Compensation Approach For Offshore CranesDocumento6 pagineA Heave Compensation Approach For Offshore CranesRenata AraujoNessuna valutazione finora
- Aerodynamics Course Notes v3Documento253 pagineAerodynamics Course Notes v3Uribe AldoNessuna valutazione finora
- Low-Speed Aerodynamics of An Unmanned Combat Aerial VehicleDocumento19 pagineLow-Speed Aerodynamics of An Unmanned Combat Aerial Vehiclesami ouahraniNessuna valutazione finora
- Modeling of Complex Systems: Application to Aeronautical DynamicsDa EverandModeling of Complex Systems: Application to Aeronautical DynamicsNessuna valutazione finora
- Model aeroplanes: The building of model monoplanes, biplanes, etc., together with a chapter on building a model airshipDa EverandModel aeroplanes: The building of model monoplanes, biplanes, etc., together with a chapter on building a model airshipNessuna valutazione finora
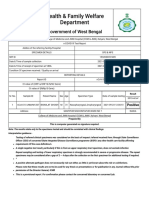
- Health & Family Welfare Department: Government of West BengalDocumento2 pagineHealth & Family Welfare Department: Government of West BengalBiswajit GhoshNessuna valutazione finora
- IRCTC LTD, Booked Ticket Printing PDFDocumento2 pagineIRCTC LTD, Booked Ticket Printing PDFBiswajit GhoshNessuna valutazione finora
- Interior Painting Requirement and Budget EstimatesDocumento7 pagineInterior Painting Requirement and Budget EstimatesBiswajit GhoshNessuna valutazione finora
- FVM Witch OpenFOAM-MatlabDocumento817 pagineFVM Witch OpenFOAM-MatlabDavid Mestanza100% (1)
- Abstract.: Array T NDocumento8 pagineAbstract.: Array T NBiswajit GhoshNessuna valutazione finora
- Interior Painting Requirement and Budget EstimatesDocumento7 pagineInterior Painting Requirement and Budget EstimatesBiswajit GhoshNessuna valutazione finora
- Azu Etd 11766 Sip1 M PDFDocumento333 pagineAzu Etd 11766 Sip1 M PDFBiswajit GhoshNessuna valutazione finora
- Santanu Dey Resume - Mechanical Engineer PhDDocumento3 pagineSantanu Dey Resume - Mechanical Engineer PhDBiswajit GhoshNessuna valutazione finora
- (NEET) UG July - 2020 Is Being Circulated Through Various Sources and Social MediaDocumento1 pagina(NEET) UG July - 2020 Is Being Circulated Through Various Sources and Social MediaBiswajit GhoshNessuna valutazione finora
- One Dimensional Wave EquationDocumento9 pagineOne Dimensional Wave EquationMario BacicNessuna valutazione finora
- Main program for CFD simulation flow analysisDocumento1 paginaMain program for CFD simulation flow analysisBiswajit GhoshNessuna valutazione finora
- Deriving the Wave Equation from Newton's LawsDocumento2 pagineDeriving the Wave Equation from Newton's LawsOmaar Mustaine RattleheadNessuna valutazione finora
- Dear Professor XXXDocumento1 paginaDear Professor XXXBiswajit GhoshNessuna valutazione finora
- Para View Tutorial 42Documento136 paginePara View Tutorial 42Biswajit GhoshNessuna valutazione finora
- Eng Quist 77Documento24 pagineEng Quist 77Biswajit GhoshNessuna valutazione finora
- Ib Zhang Zheng JCP2007Documento19 pagineIb Zhang Zheng JCP2007Biswajit GhoshNessuna valutazione finora
- L16 17 Shell StructuresDocumento128 pagineL16 17 Shell StructuresAnand Thomas100% (1)
- Aerodynamics MCQs on Low Speed AerodynamicsDocumento4 pagineAerodynamics MCQs on Low Speed AerodynamicsHarish MathiazhahanNessuna valutazione finora
- Ansys Tutorial Analysis of A Beam With A Distributed Load: PreprocessingDocumento5 pagineAnsys Tutorial Analysis of A Beam With A Distributed Load: PreprocessingLatifa BoussaliaNessuna valutazione finora
- My TestDocumento2 pagineMy TestLim Chin YangNessuna valutazione finora
- Lecture 4 - Free EnergyDocumento16 pagineLecture 4 - Free EnergyyudhiprasetyoNessuna valutazione finora
- Mechanics of Deformable Bodies Solved ProblemsDocumento10 pagineMechanics of Deformable Bodies Solved ProblemsYan NieNessuna valutazione finora
- Advanced Fluid MechanicsDocumento154 pagineAdvanced Fluid MechanicsMohammad irfanNessuna valutazione finora
- 5.3.conjugate Beam MethodDocumento14 pagine5.3.conjugate Beam MethodRemylin De GuzmanNessuna valutazione finora
- Effects of Earthquakes On Dams and Embankments By: Fifth RankineDocumento22 pagineEffects of Earthquakes On Dams and Embankments By: Fifth RankineΚική ΚωστοπούλουNessuna valutazione finora
- Tutorial 3Documento15 pagineTutorial 3carleston thurgoodNessuna valutazione finora
- Prediction of Stress Distribution in Press-Fit Process of Interference Fit With A New Theoretical ModelDocumento14 paginePrediction of Stress Distribution in Press-Fit Process of Interference Fit With A New Theoretical ModelDragon EcuNessuna valutazione finora
- Phy PreDocumento7 paginePhy PreNaveen JhaNessuna valutazione finora
- Chapter 3 Problems: Article 3/3 Problems Introductory ProblemsDocumento55 pagineChapter 3 Problems: Article 3/3 Problems Introductory ProblemsM100% (1)
- (1.0 Credit) : Structural Analysis and Design Sessional-IDocumento34 pagine(1.0 Credit) : Structural Analysis and Design Sessional-IAnonymous aE0YYlCOKNessuna valutazione finora
- KS4 Physics: ElectromagnetismDocumento26 pagineKS4 Physics: Electromagnetismda_reaper_dasNessuna valutazione finora
- (Studia Geotechnica Et Mechanica) Study of Displacements of A Bridge Abutment Using FEMDocumento10 pagine(Studia Geotechnica Et Mechanica) Study of Displacements of A Bridge Abutment Using FEMAnonymous hprsT3WlPNessuna valutazione finora
- Rate of ChangeDocumento22 pagineRate of ChangeTrisha MariehNessuna valutazione finora
- Principle of Thermal Engineering-1Documento20 paginePrinciple of Thermal Engineering-1Getachew TikueNessuna valutazione finora
- Angular Speed and Satellite OrbitDocumento11 pagineAngular Speed and Satellite OrbitAbhay RanjitNessuna valutazione finora
- Rotor-Stator Rubbing Contact in An Overhung Rotordynamic SystemDocumento3 pagineRotor-Stator Rubbing Contact in An Overhung Rotordynamic Systemtanha56313955Nessuna valutazione finora
- CHP 7 8 Energy Energy Transfer Potential EnergyDocumento66 pagineCHP 7 8 Energy Energy Transfer Potential EnergyNur Hafizah Md DisaNessuna valutazione finora
- Non-Linear Analysis Models For Composite Plate Shear Walls-ConcreteDocumento14 pagineNon-Linear Analysis Models For Composite Plate Shear Walls-ConcreteHamid GoodarziNessuna valutazione finora
- Chemical Engineering Apparatus Design: Chapter-1Documento53 pagineChemical Engineering Apparatus Design: Chapter-1Eshetu ShemetNessuna valutazione finora
- Physics HomeworkDocumento4 paginePhysics Homeworktom_sodenNessuna valutazione finora
- Forces 4 QPDocumento9 pagineForces 4 QPLutfi HidayatNessuna valutazione finora
- Reviewer 2020Documento50 pagineReviewer 2020Catherine RenanteNessuna valutazione finora
- B e Sem 6 2016-17 PesitDocumento47 pagineB e Sem 6 2016-17 Pesitapi-294538209100% (1)
- FM & F Machines 2013 PDFDocumento355 pagineFM & F Machines 2013 PDFChandan KumarNessuna valutazione finora
- Solutions Chapter 3 (WǪ) PDFDocumento17 pagineSolutions Chapter 3 (WǪ) PDF黃羿傑Nessuna valutazione finora
- Indian Standard Angle Sections 01Documento1 paginaIndian Standard Angle Sections 01CIVILNessuna valutazione finora