Potrebbero piacerti anche
- VidrioDocumento131 pagineVidrioEmmanuel Olguin CallejasNessuna valutazione finora
- Teorias Thurstone y Cattell PsicologiaDocumento3 pagineTeorias Thurstone y Cattell Psicologiayelitza941050% (2)
- Libro BioinformaticaDocumento167 pagineLibro BioinformaticaTorres M Alejandra100% (6)
- Solicitud de Carta de Presentación para Residencia ProfesionalDocumento3 pagineSolicitud de Carta de Presentación para Residencia ProfesionalEmmanuel Olguin CallejasNessuna valutazione finora
- Datos de La DependenciaDocumento2 pagineDatos de La DependenciaEmmanuel Olguin CallejasNessuna valutazione finora
- Bombas en Serie y Paralelo1Documento20 pagineBombas en Serie y Paralelo1Emilio SilvaNessuna valutazione finora
- Diagrama de Causa y EfectoDocumento6 pagineDiagrama de Causa y EfectoEmmanuel Olguin CallejasNessuna valutazione finora
- Con CentraDocumento1 paginaCon CentraEmmanuel Olguin CallejasNessuna valutazione finora
- BiodDocumento27 pagineBiodEmmanuel Olguin CallejasNessuna valutazione finora
- Biod 2Documento18 pagineBiod 2Emmanuel Olguin CallejasNessuna valutazione finora
- PR Tension 2Documento13 paginePR Tension 2Emmanuel Olguin CallejasNessuna valutazione finora
- Reporte de Recorridos CulturalesDocumento2 pagineReporte de Recorridos CulturalesEmmanuel Olguin CallejasNessuna valutazione finora
- Probe TaDocumento1 paginaProbe TaEmmanuel Olguin CallejasNessuna valutazione finora
- Datos de La DependenciaDocumento2 pagineDatos de La DependenciaEmmanuel Olguin CallejasNessuna valutazione finora
- El MecdocxDocumento81 pagineEl MecdocxEmmanuel Olguin CallejasNessuna valutazione finora
- Aislantes TérmicosDocumento15 pagineAislantes TérmicosVane VallejoNessuna valutazione finora
- Teorema de CastiglianoDocumento16 pagineTeorema de CastiglianoLina Marcela LizarazoNessuna valutazione finora
- DistribucionDocumento13 pagineDistribucionEmmanuel Olguin CallejasNessuna valutazione finora
- Ensayo 4 TaDocumento10 pagineEnsayo 4 TaEmmanuel Olguin CallejasNessuna valutazione finora
- 45Documento33 pagine45Emmanuel Olguin CallejasNessuna valutazione finora
- Repaso de Calculo e Introduccion A Las Ecs DifsDocumento119 pagineRepaso de Calculo e Introduccion A Las Ecs DifsurielNessuna valutazione finora
- Calendario Tareas IyC 5V 2015-2Documento2 pagineCalendario Tareas IyC 5V 2015-2Emmanuel Olguin CallejasNessuna valutazione finora
- 45Documento33 pagine45Emmanuel Olguin CallejasNessuna valutazione finora
- ReciclajeDocumento32 pagineReciclajeEmmanuel Olguin CallejasNessuna valutazione finora
- TENFRIDocumento5 pagineTENFRIEmmanuel Olguin CallejasNessuna valutazione finora
- Practica Bag ReDocumento9 paginePractica Bag ReEmmanuel Olguin CallejasNessuna valutazione finora
- Conform A DoDocumento22 pagineConform A DoEmmanuel Olguin CallejasNessuna valutazione finora
- Guia 2015Documento23 pagineGuia 2015Norka KordaNessuna valutazione finora
- FormacionDocumento23 pagineFormacionEmmanuel Olguin CallejasNessuna valutazione finora
- Tema 2 Ciclos de Refrigeracion1Documento39 pagineTema 2 Ciclos de Refrigeracion1Jota Mario Llanos50% (2)
- 08 Pals 01Documento24 pagine08 Pals 01Emmanuel Olguin CallejasNessuna valutazione finora
- Antonio López Fonseca Traduco Ergo Intellego. La Traducción Como Proceso de Comunicación InterlingüísticaDocumento38 pagineAntonio López Fonseca Traduco Ergo Intellego. La Traducción Como Proceso de Comunicación InterlingüísticaÁngeles NafríaNessuna valutazione finora
- Técnicas para El Abordaje de La Consejería - TRABAJO SOCIALDocumento45 pagineTécnicas para El Abordaje de La Consejería - TRABAJO SOCIALJulissa Leyva100% (1)
- Apuntes Litwin ConfiguracionesDocumento5 pagineApuntes Litwin ConfiguracionesleonardoNessuna valutazione finora
- Clase 9 Pensamiento Sistémico 2023-1Documento33 pagineClase 9 Pensamiento Sistémico 2023-1Valeria AlarcónNessuna valutazione finora
- 394 EVO-W54ARv2 Modo Universal RepeaterDocumento4 pagine394 EVO-W54ARv2 Modo Universal RepeaternicolasfmNessuna valutazione finora
- Parcial de Estadistica Parte 1 y 2Documento29 pagineParcial de Estadistica Parte 1 y 2Distribuidora EmocNessuna valutazione finora
- PIZARRÓN - Clase 6Documento3 paginePIZARRÓN - Clase 6Inu vNessuna valutazione finora
- Actividad #3 (21-10-2020)Documento4 pagineActividad #3 (21-10-2020)JESUS ELIAS HERNANDEZ FLORESNessuna valutazione finora
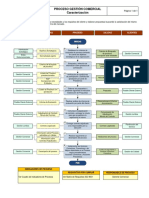
- Proceso Gestión ComercialDocumento1 paginaProceso Gestión ComercialSabrina Valdivia SalcedoNessuna valutazione finora
- El Marketing Sin MarketingDocumento8 pagineEl Marketing Sin MarketingLes C. BernalNessuna valutazione finora
- Definición y Características de La Conducta Anormal.Documento22 pagineDefinición y Características de La Conducta Anormal.Pablo Hernandez100% (1)
- Exposición - Enfoque de Investigación CualitativaDocumento36 pagineExposición - Enfoque de Investigación CualitativasilviaNessuna valutazione finora
- Ejercicio de Seleccion de HerramientasDocumento9 pagineEjercicio de Seleccion de HerramientasAgustinNessuna valutazione finora
- Parcial 4Documento2 pagineParcial 4Jesse CookNessuna valutazione finora
- Catalogo Universal de Servicios de Salud 2012 - Causes 2012 PDFDocumento479 pagineCatalogo Universal de Servicios de Salud 2012 - Causes 2012 PDFDan Alejandro RMNessuna valutazione finora
- Derrida Las Antinomias de La Disciplina FilosóficaDocumento2 pagineDerrida Las Antinomias de La Disciplina FilosóficaAnatoleMartínezGómez0% (1)
- Matriz de Riesgos Gestion HumanaDocumento53 pagineMatriz de Riesgos Gestion HumanaMARIA JOSE GALVISNessuna valutazione finora
- COMIC, IPH Y C. de CUSTODIA TALLER DERECHO PENALDocumento9 pagineCOMIC, IPH Y C. de CUSTODIA TALLER DERECHO PENALAngel GMartinezNessuna valutazione finora
- Sesión de Aprendizaje de Producción de TextosDocumento7 pagineSesión de Aprendizaje de Producción de TextosRonald Frank Borda Quispe67% (6)
- Somos Iguales y Diferentes Guia Didactica para DocentesDocumento54 pagineSomos Iguales y Diferentes Guia Didactica para DocentesMaría Victoria GuzmánNessuna valutazione finora
- Práctica General Tercer Parcial Física PrefaDocumento20 paginePráctica General Tercer Parcial Física PrefaGuillermo Chuquimia RojasNessuna valutazione finora
- Como Instalar y Configurar Tuneup Utilities, Ccleanner, Regcleanner y Norton UtilitiesDocumento10 pagineComo Instalar y Configurar Tuneup Utilities, Ccleanner, Regcleanner y Norton UtilitiesJavier David Medina FreerNessuna valutazione finora
- Periódico La Voz EducativaDocumento3 paginePeriódico La Voz EducativaLuis JimenezNessuna valutazione finora
- Educación SemipresencialDocumento9 pagineEducación SemipresencialTaudyAponteRNessuna valutazione finora
- Estereotipo Prieto CastilloDocumento4 pagineEstereotipo Prieto CastilloNatalia Dominguez CussighNessuna valutazione finora
- Da VinciDocumento13 pagineDa VinciLaura VilbaoNessuna valutazione finora
- Organizacion Formal e InformalDocumento3 pagineOrganizacion Formal e InformalwilliamNessuna valutazione finora
- Auto Solar para Cuidar El Medio AmbienteDocumento4 pagineAuto Solar para Cuidar El Medio AmbienteAnonymous RU0D6g3G2Nessuna valutazione finora