Potrebbero piacerti anche
- 110 Waveform Generator Projects for the Home ConstructorDa Everand110 Waveform Generator Projects for the Home ConstructorValutazione: 4 su 5 stelle4/5 (1)
- Physical Database Design Using OracleDocumento264 paginePhysical Database Design Using OracleAMEYNessuna valutazione finora
- CBG Floating Cranes en 12629-0Documento16 pagineCBG Floating Cranes en 12629-0Diana Anghelache100% (1)
- Reflex IML BrochureDocumento8 pagineReflex IML BrochurereflextechNessuna valutazione finora
- 415 Hitachi Hoist SH FH Monorail TrolleyDocumento24 pagine415 Hitachi Hoist SH FH Monorail TrolleyPhillip FrencilloNessuna valutazione finora
- How To in SAPDocumento29 pagineHow To in SAPSivasankaran Munusamy100% (1)
- Liebherr LR 1200Documento24 pagineLiebherr LR 1200Shailesh KhodkeNessuna valutazione finora
- Oracle OM Prepayment Doc Id 280353.1Documento3 pagineOracle OM Prepayment Doc Id 280353.1sekharmcpNessuna valutazione finora
- Drill Floor Equipment 1Documento10 pagineDrill Floor Equipment 1John RongNessuna valutazione finora
- Arcraft Plasma Equipments (I) Pvt. LTD.: Plasma Transferred Arc - PtaDocumento4 pagineArcraft Plasma Equipments (I) Pvt. LTD.: Plasma Transferred Arc - Ptapavi32Nessuna valutazione finora
- A81nx CatalogueDocumento4 pagineA81nx CatalogueArvind Kushwaha100% (1)
- D800 BrochureDocumento4 pagineD800 BrochurefrankNessuna valutazione finora
- 10-3 Developing Microservices With WM Microservices RuntimeDocumento82 pagine10-3 Developing Microservices With WM Microservices RuntimesankbdNessuna valutazione finora
- Trumpf TruLaser PDFDocumento18 pagineTrumpf TruLaser PDFggiovaniNessuna valutazione finora
- IR LM100A Crawlair Drill PDFDocumento8 pagineIR LM100A Crawlair Drill PDFAnonymous 8yIptglHhNessuna valutazione finora
- IAI CT4 Cartesian SpecsheetDocumento15 pagineIAI CT4 Cartesian SpecsheetElectromateNessuna valutazione finora
- Dyadic Mechatronics Cylinder CatalogDocumento16 pagineDyadic Mechatronics Cylinder CatalogElectromateNessuna valutazione finora
- Payload: 80 KG: DX100 Controller Powerful Performance in A Mid-Size RobotDocumento2 paginePayload: 80 KG: DX100 Controller Powerful Performance in A Mid-Size RobotRuben AlvaradoNessuna valutazione finora
- VA1400 DataSheetDocumento2 pagineVA1400 DataSheetVikram DewanganNessuna valutazione finora
- SSF2000Documento2 pagineSSF2000sujinssridaNessuna valutazione finora
- Iai CT4 - Cj0194-2a-Ust-1-1213Documento16 pagineIai CT4 - Cj0194-2a-Ust-1-1213ElectromateNessuna valutazione finora
- Dyadic Systems 2011 CatalogDocumento16 pagineDyadic Systems 2011 CatalogServo2GoNessuna valutazione finora
- Dyadic Systems 2011 CatalogDocumento16 pagineDyadic Systems 2011 CatalogElectromateNessuna valutazione finora
- EPX2900Documento2 pagineEPX2900Anupam Singh VatsNessuna valutazione finora
- TLH PDFDocumento2 pagineTLH PDFTravis WoodNessuna valutazione finora
- Kawasaki FS03N Compact High Speed Industrial Robot: Key FeaturesDocumento2 pagineKawasaki FS03N Compact High Speed Industrial Robot: Key FeaturesMarkus ManoNessuna valutazione finora
- In Oerlikon CitolineDocumento10 pagineIn Oerlikon CitolineJavid Ibrahim MohamedNessuna valutazione finora
- Encoder S Short FormDocumento2 pagineEncoder S Short FormelecompinnNessuna valutazione finora
- Atdg 20 60 0475 01Documento2 pagineAtdg 20 60 0475 01Qiang ZhangNessuna valutazione finora
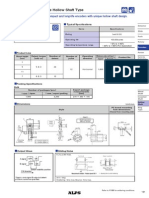
- 10mm Size Hollow Shaft Type: A Series of Compact and Long-Life Encoders With Unique Hollow Shaft DesignDocumento3 pagine10mm Size Hollow Shaft Type: A Series of Compact and Long-Life Encoders With Unique Hollow Shaft DesignshyhuNessuna valutazione finora
- Series TLH: Position Transdcuers Up To 3000 MMDocumento4 pagineSeries TLH: Position Transdcuers Up To 3000 MMEuroSMC en América LatinaNessuna valutazione finora
- Motors For Motion Control ApplicationDocumento2 pagineMotors For Motion Control Applicationalfredo_fredo_1Nessuna valutazione finora
- Shakers - CatalogDocumento8 pagineShakers - Catalogdéborah_rosales100% (1)
- Column Boom Welding MachinesDocumento8 pagineColumn Boom Welding Machinesbahram bahramiNessuna valutazione finora
- IAI IX Scara CatalogDocumento47 pagineIAI IX Scara CatalogElectromateNessuna valutazione finora
- IAI 08 RC General CJ0203-2A P493-522 Dust-ProofDocumento30 pagineIAI 08 RC General CJ0203-2A P493-522 Dust-ProofElectromateNessuna valutazione finora
- List of Varieties: Detector Slide Push RotaryDocumento5 pagineList of Varieties: Detector Slide Push RotaryshyhuNessuna valutazione finora
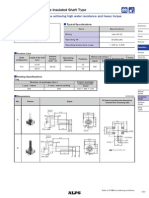
- 18mm Size Insulated Shaft Type: Absolute Type Achieving High Water Resistance and Heavy TorqueDocumento4 pagine18mm Size Insulated Shaft Type: Absolute Type Achieving High Water Resistance and Heavy TorqueshyhuNessuna valutazione finora
- Catalogo TESA 2010 - Q PDFDocumento22 pagineCatalogo TESA 2010 - Q PDFvijaybhaskarvlsNessuna valutazione finora
- Specifications: (DHP 50, DHP 80) : 4-AxisDocumento4 pagineSpecifications: (DHP 50, DHP 80) : 4-AxisskidamdnevnoNessuna valutazione finora
- SST500 Inlinometer ManualDocumento8 pagineSST500 Inlinometer ManualIan JonesNessuna valutazione finora
- RCS3-CT8C/CTZ5C: ROBO Cylinder High-Speed TypeDocumento8 pagineRCS3-CT8C/CTZ5C: ROBO Cylinder High-Speed TypeElectromateNessuna valutazione finora
- MH5S MH5LS DXM100Documento2 pagineMH5S MH5LS DXM100Myagmarbayar NerguiNessuna valutazione finora
- Broschuere Perfekt in Schweissers Hand en Aufl3 DSDocumento5 pagineBroschuere Perfekt in Schweissers Hand en Aufl3 DSRadu RusNessuna valutazione finora
- Product Description Height Control KHC1 ARCDocumento2 pagineProduct Description Height Control KHC1 ARChollabackcockNessuna valutazione finora
- Economical, Miniature Limit Switch Boasting Rigid ConstructionDocumento5 pagineEconomical, Miniature Limit Switch Boasting Rigid ConstructionRajeev Saini100% (1)
- SBM 1250 Double Twist Bunching LineDocumento12 pagineSBM 1250 Double Twist Bunching LineEMRE KAAN USTANessuna valutazione finora
- CPM Series Machines: Product Finder Home PageDocumento2 pagineCPM Series Machines: Product Finder Home PageawemetalNessuna valutazione finora
- TCF 160 / TCF 200 / TCF 224 / TCF 250 TCF 275 / TCF 300: Heavy Centre LathesDocumento8 pagineTCF 160 / TCF 200 / TCF 224 / TCF 250 TCF 275 / TCF 300: Heavy Centre LathesRajiv GandhiNessuna valutazione finora
- SH E096qDocumento24 pagineSH E096qkanstopthankNessuna valutazione finora
- RH30 Spec Sep2007Documento7 pagineRH30 Spec Sep2007gheoda8926Nessuna valutazione finora
- MRT 460 Multi-Range Transducer Data SheetDocumento6 pagineMRT 460 Multi-Range Transducer Data SheetBlAdE 12Nessuna valutazione finora
- 5mm Size Hollow Shaft Type: Compact Type Employing Alps' DRUMCODE™ TechnologyDocumento4 pagine5mm Size Hollow Shaft Type: Compact Type Employing Alps' DRUMCODE™ TechnologyshyhuNessuna valutazione finora
- MH6 MH6SDocumento2 pagineMH6 MH6SInlaboNessuna valutazione finora
- Sankyo FN - FA CatDocumento29 pagineSankyo FN - FA CatquaxesNessuna valutazione finora
- FY Series Digital PID Controller Operation ManualDocumento58 pagineFY Series Digital PID Controller Operation ManualRaviKoiralaNessuna valutazione finora
- 0 34 Chain Conveyor RL and RMDocumento1 pagina0 34 Chain Conveyor RL and RMFlamingorosadoNessuna valutazione finora
- CranesDocumento8 pagineCranesravi00098Nessuna valutazione finora
- Cartesian CatalogDocumento4 pagineCartesian CatalogreflextechNessuna valutazione finora
- Reflex CNC Autoloader CNCPIXDocumento4 pagineReflex CNC Autoloader CNCPIXreflextechNessuna valutazione finora
- Reflex Packtopackoff Catalogue v1Documento16 pagineReflex Packtopackoff Catalogue v1reflextechNessuna valutazione finora
- 8086 Family Users M 00 IntelDocumento132 pagine8086 Family Users M 00 IntelfcoppoleNessuna valutazione finora
- Aveva Global 12.0Documento2 pagineAveva Global 12.0yogudiNessuna valutazione finora
- Advance StatisticDocumento24 pagineAdvance Statisticlucky2010Nessuna valutazione finora
- Platinum Transaction Program GuideDocumento47 paginePlatinum Transaction Program GuideSSGFL10% (1)
- Study Id59297 Artificial-Intelligence-Ai PDFDocumento99 pagineStudy Id59297 Artificial-Intelligence-Ai PDFRishi KumarNessuna valutazione finora
- Airtel ServqualDocumento2 pagineAirtel ServqualVashishtha DadhichNessuna valutazione finora
- Visual Basic Programming FundamentalsDocumento43 pagineVisual Basic Programming FundamentalsCid Benedict PabalanNessuna valutazione finora
- Partner ID Partner Name Parent ID Parent Name Partner Role NameDocumento4 paginePartner ID Partner Name Parent ID Parent Name Partner Role NamedineshNessuna valutazione finora
- Lenovo Secret CodesDocumento7 pagineLenovo Secret CodesfetniNessuna valutazione finora
- Datasheet PW MS SeriesDocumento4 pagineDatasheet PW MS SeriesLương Thanh TùngNessuna valutazione finora
- Coal Preparation: To Cite This Article: Gerald H. Luttrell (2004) Reconciliation of ExcessDocumento20 pagineCoal Preparation: To Cite This Article: Gerald H. Luttrell (2004) Reconciliation of ExcessalinoriNessuna valutazione finora
- Format Types - Bluetooth Technology WebsiteDocumento3 pagineFormat Types - Bluetooth Technology WebsiteAshok Siva Kumar PoojalaNessuna valutazione finora
- Códigos de ErrorDocumento36 pagineCódigos de ErrorGerardo MandujanoNessuna valutazione finora
- Getting Started With MASMDocumento22 pagineGetting Started With MASMWilliam Smith100% (1)
- Anabela Oliveira's ResumeDocumento2 pagineAnabela Oliveira's ResumeAnabela OliveiraNessuna valutazione finora
- Crabby's Top 10 E-Mail Crabs: Crab #1: Discretion Is The Greater Part of ReplyingDocumento9 pagineCrabby's Top 10 E-Mail Crabs: Crab #1: Discretion Is The Greater Part of ReplyingSarangNessuna valutazione finora
- A PimpleFoam Tutorial For Channel Flow, With Respect To Different LES ModelsDocumento23 pagineA PimpleFoam Tutorial For Channel Flow, With Respect To Different LES ModelshamidntNessuna valutazione finora
- Course Outline - Spring - 2014 PDFDocumento6 pagineCourse Outline - Spring - 2014 PDFAgusNursidikNessuna valutazione finora
- Chapter 11. Worst Case Analysis - Analog Design and Simulation Using OrCAD Capture and PSpiceDocumento9 pagineChapter 11. Worst Case Analysis - Analog Design and Simulation Using OrCAD Capture and PSpiceSiva KumarNessuna valutazione finora
- Integration Testing Approach BSA PL V2 FinalDocumento5 pagineIntegration Testing Approach BSA PL V2 FinalArghya SahaNessuna valutazione finora
- Computer Architecture and PerformanceDocumento33 pagineComputer Architecture and Performanceponygal13Nessuna valutazione finora
- Winoncd 3.6 ManualDocumento186 pagineWinoncd 3.6 ManualestudiocodecNessuna valutazione finora
- Easyparcel Marketplace Api Documentation V3.0.0Documento51 pagineEasyparcel Marketplace Api Documentation V3.0.0anon_448388059Nessuna valutazione finora
- Chapter 5Documento43 pagineChapter 5Muhammad Saqib0% (1)
- RSLTE020 MIMO and OFDM RSLTEDocumento114 pagineRSLTE020 MIMO and OFDM RSLTEAnonymous DUua3A5Nessuna valutazione finora
- LALR Parser For A Grammar: Compiler DesignDocumento8 pagineLALR Parser For A Grammar: Compiler DesignNameet JainNessuna valutazione finora