Potrebbero piacerti anche
- 1021F, 1121F Tier 2 Wheel Loader Electrical SchematicDocumento4 pagine1021F, 1121F Tier 2 Wheel Loader Electrical SchematicEl PerroNessuna valutazione finora
- HV Reference Manual V2 May 2011Documento101 pagineHV Reference Manual V2 May 2011NouredineNessuna valutazione finora
- Advanced SensorsDocumento23 pagineAdvanced SensorsAzharuddin MansooriNessuna valutazione finora
- Distribution VoltageDocumento10 pagineDistribution VoltageIsagani Madrid100% (1)
- EMI FilterDocumento18 pagineEMI FilterNitish DubeyNessuna valutazione finora
- Burglar Alarm ProjectDocumento6 pagineBurglar Alarm ProjectAvik Pathak100% (1)
- LM35 Temperature SensorDocumento13 pagineLM35 Temperature Sensorapi-3799604100% (1)
- Pass Ultrasound Physics Exam Study Guide ReviewDa EverandPass Ultrasound Physics Exam Study Guide ReviewValutazione: 4.5 su 5 stelle4.5/5 (2)
- Operational Amplifier Noise: Techniques and Tips for Analyzing and Reducing NoiseDa EverandOperational Amplifier Noise: Techniques and Tips for Analyzing and Reducing NoiseValutazione: 5 su 5 stelle5/5 (1)
- Frequency Modulation and Demodulation TechniquesDocumento80 pagineFrequency Modulation and Demodulation Techniquessatpals56Nessuna valutazione finora
- Electronic Pest Control PDFDocumento27 pagineElectronic Pest Control PDFchinmay kulkarniNessuna valutazione finora
- Paper 48Documento14 paginePaper 48andrewducot2006Nessuna valutazione finora
- Chapter 3Documento19 pagineChapter 3MUBARAK RAHAMAN HNessuna valutazione finora
- Helping the Blind Device Designed Using MicrocontrollerDocumento9 pagineHelping the Blind Device Designed Using MicrocontrollerBiancaNessuna valutazione finora
- Solar Powered Smart Ultrasonic Insects RepellentDocumento5 pagineSolar Powered Smart Ultrasonic Insects RepellentshivNessuna valutazione finora
- Ultrasonic RADAR Project using Microcontroller and Stepper MotorDocumento6 pagineUltrasonic RADAR Project using Microcontroller and Stepper Motorricky100% (3)
- Analog Characteristics of Ultrasonic Flaw DetectorsDocumento8 pagineAnalog Characteristics of Ultrasonic Flaw DetectorsbingwazzupNessuna valutazione finora
- Design and Experiment of Electrooculogram EOG SystDocumento9 pagineDesign and Experiment of Electrooculogram EOG SystAbdulazizNessuna valutazione finora
- Index: S.NO. Content Page NoDocumento9 pagineIndex: S.NO. Content Page NoChaitanyaNessuna valutazione finora
- A Study On An EMG Sensor With High Gain and Low Noise For Measuring Human Muscular Movement Patterns For Smart HealthcareDocumento11 pagineA Study On An EMG Sensor With High Gain and Low Noise For Measuring Human Muscular Movement Patterns For Smart HealthcareRoker boyNessuna valutazione finora
- Design library noise alarm clockDocumento6 pagineDesign library noise alarm clockGiphy GeorgeNessuna valutazione finora
- PAM, PPM, PWM Modulation and Demodulation Trainer ST2110 LearningDocumento67 paginePAM, PPM, PWM Modulation and Demodulation Trainer ST2110 Learningchemavalencia100% (2)
- Wireless Electrical Appliances Using IR SensorsDocumento8 pagineWireless Electrical Appliances Using IR SensorsmadhavNessuna valutazione finora
- Real-Time Individual Finger Movement of A Mecha TE Robotic Hand Using Human Forearm sEMG Signals Through Hardware-Software CommunicationDocumento7 pagineReal-Time Individual Finger Movement of A Mecha TE Robotic Hand Using Human Forearm sEMG Signals Through Hardware-Software CommunicationnaeemNessuna valutazione finora
- Ultrasonic obstacle detection for blindDocumento3 pagineUltrasonic obstacle detection for blindLalit PatilNessuna valutazione finora
- "Simple Touch Alarm System" Subject: Report On Course Project OnDocumento14 pagine"Simple Touch Alarm System" Subject: Report On Course Project OnRichaNessuna valutazione finora
- Virtual Eye for Blind PeopleDocumento7 pagineVirtual Eye for Blind PeopleraviNessuna valutazione finora
- Ultrasonic Motion DetectorDocumento9 pagineUltrasonic Motion DetectorMarium AliNessuna valutazione finora
- Sound Activated Intercom DocuDocumento15 pagineSound Activated Intercom DocuGanimid AlvarezNessuna valutazione finora
- EE-04306 Sensor Technology AssignmentDocumento10 pagineEE-04306 Sensor Technology AssignmentCharsi 1080Nessuna valutazione finora
- Design and Development of Variable Frequency Ultrasonic Pest RepellerDocumento14 pagineDesign and Development of Variable Frequency Ultrasonic Pest RepellerS shek DhavudNessuna valutazione finora
- Modified Radar ReportDocumento17 pagineModified Radar ReportAsif KarimNessuna valutazione finora
- PAPER48Documento14 paginePAPER48Annie AisaNessuna valutazione finora
- Gesture Based Glove For Multiple ApplicationsDocumento24 pagineGesture Based Glove For Multiple ApplicationsSavan ChauhanNessuna valutazione finora
- A Microprocessor Based Clutter Canceller For Life Locator SystemDocumento6 pagineA Microprocessor Based Clutter Canceller For Life Locator SystemPln DivyaNessuna valutazione finora
- Measuring Sound Levels with an Affordable InstrumentDocumento9 pagineMeasuring Sound Levels with an Affordable InstrumentBecky CecilNessuna valutazione finora
- Electronic NoseDocumento30 pagineElectronic NoseLanka Vinay NagNessuna valutazione finora
- Intelligent Honking SystemDocumento6 pagineIntelligent Honking SystemIJRASETPublicationsNessuna valutazione finora
- Operating Manual of UD2301Documento38 pagineOperating Manual of UD2301mreyes-aldamaNessuna valutazione finora
- Mkm1133 Instrumentation and Control SystemDocumento19 pagineMkm1133 Instrumentation and Control SystemNurul Nadia Mohd ZawawiNessuna valutazione finora
- Design and Development of Microcontroller Based Ultrasonic Flaw DetectorDocumento7 pagineDesign and Development of Microcontroller Based Ultrasonic Flaw DetectorBagusElokNessuna valutazione finora
- Multichannel IR Remote Control For Home OfficeDocumento7 pagineMultichannel IR Remote Control For Home OfficeKamlesh Motghare100% (1)
- Automa T Ic Door S Ys T Em: Mini-ProjectDocumento14 pagineAutoma T Ic Door S Ys T Em: Mini-ProjectCao Văn LongNessuna valutazione finora
- Audio Signal Tracer ProjectDocumento8 pagineAudio Signal Tracer ProjectPrashant KumarNessuna valutazione finora
- Audio Frequency Amplifier Applications Low Noise Amplifier ApplicationsDocumento3 pagineAudio Frequency Amplifier Applications Low Noise Amplifier ApplicationsDian SetiawanNessuna valutazione finora
- Mini-Project: Aut Omat Ic Door Syst emDocumento14 pagineMini-Project: Aut Omat Ic Door Syst emJanwan BagwanNessuna valutazione finora
- Vehicle Anti-Collision Using Ultrasonic SignalsDocumento22 pagineVehicle Anti-Collision Using Ultrasonic SignalsAakash GuptaNessuna valutazione finora
- Alive Human Detecting RobotDocumento19 pagineAlive Human Detecting Robotjaineetesh1991100% (4)
- Ok - Low Cost ElectroOculoGram Signals AmplifierDocumento13 pagineOk - Low Cost ElectroOculoGram Signals AmplifierGilberto JuniorNessuna valutazione finora
- Life Saving Embedded SymsDocumento11 pagineLife Saving Embedded SymsSunny DineshNessuna valutazione finora
- Project Live Human Detecting RobotDocumento19 pagineProject Live Human Detecting Robotjaineetesh1991Nessuna valutazione finora
- Alive Human Being Detector In war FieldsDocumento4 pagineAlive Human Being Detector In war Fields22kakashiNessuna valutazione finora
- A CMOS Instrumentation Amplifier For EEG Front End SystemDocumento5 pagineA CMOS Instrumentation Amplifier For EEG Front End SystemJOYCENessuna valutazione finora
- NVSH - Experiment No.1 - Prathmesh ChavanDocumento9 pagineNVSH - Experiment No.1 - Prathmesh ChavanStorm RiderNessuna valutazione finora
- A Design For Active Noise Cancellation in The 2Cc CouplerDocumento4 pagineA Design For Active Noise Cancellation in The 2Cc CouplerAnuroop G RaoNessuna valutazione finora
- Project Review On Ultrasonic Distance Measurement: Prakhar Shrivastava, Praveen Kumar, Ankit TiwariDocumento3 pagineProject Review On Ultrasonic Distance Measurement: Prakhar Shrivastava, Praveen Kumar, Ankit TiwarirajatpreetNessuna valutazione finora
- Article - Vibrometer-LAJPE 748 Brian Usibe PreprintDocumento5 pagineArticle - Vibrometer-LAJPE 748 Brian Usibe Preprint21M248 - SIBI SELVAN CNessuna valutazione finora
- Ultrasound MachineDocumento36 pagineUltrasound MachineYechale TafereNessuna valutazione finora
- Jai Guided WaveDocumento8 pagineJai Guided Waveimryuk19Nessuna valutazione finora
- ISSN 1392-1215 Pulse Sensor of Physiological Parameter Monitoring System 2007 V78 P 67-70Documento4 pagineISSN 1392-1215 Pulse Sensor of Physiological Parameter Monitoring System 2007 V78 P 67-70Himanshu DixitNessuna valutazione finora
- Ultrasonic HC-SR04 PDFDocumento4 pagineUltrasonic HC-SR04 PDFDhany SSat0% (1)
- Upgraded Ultrasonic Animal Deterrent DeviceDocumento6 pagineUpgraded Ultrasonic Animal Deterrent DevicePatrick LambotteNessuna valutazione finora
- On Brain Computer Interface: 2. Proposed System 3. Working 4. Advantages 5. Disadvantages 6. ApplicationsDocumento14 pagineOn Brain Computer Interface: 2. Proposed System 3. Working 4. Advantages 5. Disadvantages 6. Applicationsannrose_mecNessuna valutazione finora
- Obstacle Avoidance Robot Project ReportDocumento19 pagineObstacle Avoidance Robot Project Reportsasankakatreddi0% (1)
- Chapter 4: Programmable Logic DevicesDocumento63 pagineChapter 4: Programmable Logic DevicesKasi ChinnaNessuna valutazione finora
- Max3070e Max3079e PDFDocumento24 pagineMax3070e Max3079e PDFKasi ChinnaNessuna valutazione finora
- Quine-McCluskey Tabular MinimizationDocumento17 pagineQuine-McCluskey Tabular MinimizationMohammedali_Kh_1552Nessuna valutazione finora
- Chapter 4: Programmable Logic DevicesDocumento63 pagineChapter 4: Programmable Logic DevicesKasi ChinnaNessuna valutazione finora
- At 89 C 52Documento24 pagineAt 89 C 52Rohit MehtaNessuna valutazione finora
- Flash FileDocumento39 pagineFlash Fileletanbaospkt06Nessuna valutazione finora
- ASP.Net.docxDocumento74 pagineASP.Net.docxKasi ChinnaNessuna valutazione finora
- Frank Vahid PDFDocumento11 pagineFrank Vahid PDFKasi ChinnaNessuna valutazione finora
- Hydraulics LectureDocumento20 pagineHydraulics Lecturee_manpreetNessuna valutazione finora
- Examining The Fat File SystemDocumento22 pagineExamining The Fat File SystemKasi ChinnaNessuna valutazione finora
- Flash Me M GuideDocumento13 pagineFlash Me M GuideTerence LeungNessuna valutazione finora
- Digital StorageDocumento3 pagineDigital StoragegadunNessuna valutazione finora
- Fatgen 103Documento34 pagineFatgen 103Kasi ChinnaNessuna valutazione finora
- Spraa 33Documento12 pagineSpraa 33Ayesha KamalNessuna valutazione finora
- Selection of Candidates For Lynux BELDocumento1 paginaSelection of Candidates For Lynux BELKasi ChinnaNessuna valutazione finora
- Transformer Fault Detection Using Zigbee and GSMDocumento46 pagineTransformer Fault Detection Using Zigbee and GSMIrfan Baig100% (1)
- μP Compatible A/D Converters with 8-Channel: ADC0808/ADC0809 8-Bit MultiplexerDocumento16 pagineμP Compatible A/D Converters with 8-Channel: ADC0808/ADC0809 8-Bit MultiplexerKasi ChinnaNessuna valutazione finora
- Wireless Transformer MonitoringDocumento18 pagineWireless Transformer MonitoringKamlesh MotghareNessuna valutazione finora
- Fantasyelectronics - Automatic Railway Gate Control System Using AVR ATmega8 With Complete Project Report, Code and Circuit DiagramDocumento7 pagineFantasyelectronics - Automatic Railway Gate Control System Using AVR ATmega8 With Complete Project Report, Code and Circuit DiagramKasi ChinnaNessuna valutazione finora
- 200 Motivational Quotes An Inspirational ReferenceDocumento42 pagine200 Motivational Quotes An Inspirational ReferencevinaykumarjainNessuna valutazione finora
- UR24A Multi-Channel UART Wireless ModuleDocumento6 pagineUR24A Multi-Channel UART Wireless ModuleKasi ChinnaNessuna valutazione finora
- Intelligent Railway Level Crossing SystemDocumento2 pagineIntelligent Railway Level Crossing SystemKasi ChinnaNessuna valutazione finora
- K.H.V.Sreenivasa Varma (06-469) K.Srimala (06-470) B.Sindhu (06-471) A.Sreenivas (06-472) Presented byDocumento16 pagineK.H.V.Sreenivasa Varma (06-469) K.Srimala (06-470) B.Sindhu (06-471) A.Sreenivas (06-472) Presented byKrishna Gowri DasariNessuna valutazione finora
- Automatic Railwa Gate ControlDocumento57 pagineAutomatic Railwa Gate ControlmgitecetechNessuna valutazione finora
- 312 PPTDocumento37 pagine312 PPTHcv Prasad KacharlaNessuna valutazione finora
- 312 DocDocumento87 pagine312 DocHcv Prasad KacharlaNessuna valutazione finora
- Learn. Explore. Excel.: 20135127 Hall Ticket For MS in VLSI Engg. Entrance Test - 2013' Hall Ticket No MS13 - 1095Documento2 pagineLearn. Explore. Excel.: 20135127 Hall Ticket For MS in VLSI Engg. Entrance Test - 2013' Hall Ticket No MS13 - 1095Kasi ChinnaNessuna valutazione finora
- XBEE Based Remote Monitoring of 3 Parameters On Transformer / Generator HealthDocumento2 pagineXBEE Based Remote Monitoring of 3 Parameters On Transformer / Generator HealthKasi ChinnaNessuna valutazione finora
- Guidelines For The Operation of Digital FM Radio BroadcastDocumento3 pagineGuidelines For The Operation of Digital FM Radio BroadcastmiyumiNessuna valutazione finora
- Ad8091 8092-1502159Documento21 pagineAd8091 8092-1502159tulios6262Nessuna valutazione finora
- ITT American Electric Contempo Post Top Series 245 & 246 Spec Sheet 3-81Documento8 pagineITT American Electric Contempo Post Top Series 245 & 246 Spec Sheet 3-81Alan MastersNessuna valutazione finora
- Experiment No10 Simulation of Photodiode Using MATLAB SIMULINKDocumento3 pagineExperiment No10 Simulation of Photodiode Using MATLAB SIMULINKVaishnavi muralliNessuna valutazione finora
- Nmos350 500ConstructionGuideDocumento3 pagineNmos350 500ConstructionGuidetrkonjicNessuna valutazione finora
- Embedded Systems Vocational Training ReportDocumento16 pagineEmbedded Systems Vocational Training ReportTarun kumarNessuna valutazione finora
- Device List for Prayagraj STPP TG Unit 1Documento12 pagineDevice List for Prayagraj STPP TG Unit 1apsNessuna valutazione finora
- OP297 - DatasheetDocumento16 pagineOP297 - DatasheetGleb Leonidovich KorenzvitNessuna valutazione finora
- EC VIII Sem Television and RADAR EnggDocumento2 pagineEC VIII Sem Television and RADAR Enggcrazy about reading0% (1)
- BTS3006C ModulesDocumento39 pagineBTS3006C ModulesMakarand DereNessuna valutazione finora
- Cable Accessories GuideDocumento2 pagineCable Accessories Guideeleon07Nessuna valutazione finora
- SFM With Binlevel MeasuringiDocumento7 pagineSFM With Binlevel Measuringiayaskant751001Nessuna valutazione finora
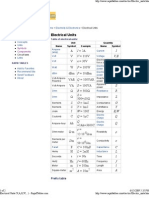
- Electrical Units Guide (V, A, Ω, WDocumento2 pagineElectrical Units Guide (V, A, Ω, Wevtoma100% (1)
- Instruction Manual ELOTOP 502-EnDocumento46 pagineInstruction Manual ELOTOP 502-EnEmigdio PoloNessuna valutazione finora
- ข้อสอบhigh volt - 6210504761Documento10 pagineข้อสอบhigh volt - 6210504761jullakorn pcsrNessuna valutazione finora
- Hengxin HF Jumper CableDocumento9 pagineHengxin HF Jumper Cableculeros1Nessuna valutazione finora
- Self-Assessment CheckDocumento3 pagineSelf-Assessment CheckJAY R PACIONNessuna valutazione finora
- Logic GatesDocumento22 pagineLogic GatesHassan AlaradiNessuna valutazione finora
- Renr7947renr7947-03 - Sis C9con DeifeDocumento4 pagineRenr7947renr7947-03 - Sis C9con DeifeMiloš StijeljaNessuna valutazione finora
- Hoppecke RTM2-RPM2 Ficha (Cargador) (Ingles 2017) PDFDocumento2 pagineHoppecke RTM2-RPM2 Ficha (Cargador) (Ingles 2017) PDFJuan Carlos Rubio Fresco0% (1)
- DUO 2X TypeDocumento1 paginaDUO 2X TypeHarshad PatilNessuna valutazione finora
- Vacuum Circuit-Breaker: Instruction ManualDocumento32 pagineVacuum Circuit-Breaker: Instruction ManualVinay GuptaNessuna valutazione finora
- Empower - Technical Brief Pulse ShapingDocumento4 pagineEmpower - Technical Brief Pulse Shapingsameer_msbNessuna valutazione finora
- Trouble Shooting-Diagram Tank Level Measuring system-EL-TDocumento5 pagineTrouble Shooting-Diagram Tank Level Measuring system-EL-TEtl OdessaNessuna valutazione finora
- GUESH FINAL REPORT ON APF (Repaired) Alex PowerDocumento40 pagineGUESH FINAL REPORT ON APF (Repaired) Alex PowerBelayneh Tadesse100% (3)
- Class 12 Q, F TestDocumento2 pagineClass 12 Q, F TestAnand KumarNessuna valutazione finora
- ALSTOM I400 EN M F-Epslanguage en-GBDocumento50 pagineALSTOM I400 EN M F-Epslanguage en-GBElectromontaj CraiovaNessuna valutazione finora