Potrebbero piacerti anche
- Ur10 User Manual Es PDFDocumento185 pagineUr10 User Manual Es PDFDaniel PérezNessuna valutazione finora
- Grafcet TeoriaDocumento11 pagineGrafcet Teoriaprofe111Nessuna valutazione finora
- 3 Variables Aleatorias y Distribuciones EspecialesDocumento25 pagine3 Variables Aleatorias y Distribuciones Especialesdr0noxNessuna valutazione finora
- Estadistica ComplejaDocumento13 pagineEstadistica ComplejaRocio GualdronNessuna valutazione finora
- Informe GrafotécnicoDocumento18 pagineInforme GrafotécnicoAndrea LOurdesNessuna valutazione finora
- Operaciones de VecindadDocumento4 pagineOperaciones de VecindadAlfonso AlejandroNessuna valutazione finora
- La Cadena de SuministroDocumento24 pagineLa Cadena de SuministroJeyson CalderonNessuna valutazione finora
- Lab ARM CortexDocumento122 pagineLab ARM CortexjuanitoingNessuna valutazione finora
- BIOSTAR P4M800 Pro-M7 Versión 1.2Documento3 pagineBIOSTAR P4M800 Pro-M7 Versión 1.2Jorge Moises Zegarra Berra100% (1)
- Curso Postgrado NeuromarketingDocumento14 pagineCurso Postgrado NeuromarketingGustavo Adolfo Arriagada MendozaNessuna valutazione finora
- Prueba de Habilidades - CiscoDocumento46 paginePrueba de Habilidades - CiscohuguitofeoNessuna valutazione finora
- Tema 6 MMODocumento2 pagineTema 6 MMOjuanNessuna valutazione finora
- Unidad 4 Microcontrolador Parte 1Documento34 pagineUnidad 4 Microcontrolador Parte 1Karen CaamañoNessuna valutazione finora
- H Foda FichaDocumento4 pagineH Foda FichaHector Gomez de la Torre Marquina100% (1)
- El Manejo de Los Procesos en Los Sistemas Gerenciales de Computación ModelosDocumento2 pagineEl Manejo de Los Procesos en Los Sistemas Gerenciales de Computación Modelosjulio cesar ParraNessuna valutazione finora
- Autoevaluación 3 y 4Documento3 pagineAutoevaluación 3 y 4gisselpineda446667% (3)
- Comandos Básicos STATADocumento7 pagineComandos Básicos STATAbeatlenzo87Nessuna valutazione finora
- El Universo Digital Del IBM PC AT y PS2 (4 Edicion)Documento372 pagineEl Universo Digital Del IBM PC AT y PS2 (4 Edicion)Gustavo MuñozNessuna valutazione finora
- Actualizar Avast GratisDocumento3 pagineActualizar Avast Gratisbaldocr7Nessuna valutazione finora
- Evolución de Las Computadoras Durante El Siglo XIXDocumento7 pagineEvolución de Las Computadoras Durante El Siglo XIXKenneth AlvaradoNessuna valutazione finora
- Community Manager BásicoDocumento155 pagineCommunity Manager BásicoMarcelo Candell Moncada100% (3)
- Tutorial JTAG para Receptores dm500 y ClonesDocumento5 pagineTutorial JTAG para Receptores dm500 y ClonesMartin Alvarado VieraNessuna valutazione finora
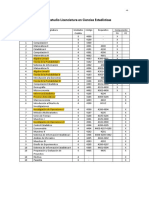
- Estadistica Pensum - UCV (UNIVERSIDAD CENTRAL DE VENEZUELA)Documento1 paginaEstadistica Pensum - UCV (UNIVERSIDAD CENTRAL DE VENEZUELA)WILMOISNessuna valutazione finora
- Tutorial de Como Hacer Un Sistema de Alcantarillado en El SewergemsDocumento8 pagineTutorial de Como Hacer Un Sistema de Alcantarillado en El SewergemsJoaco Burgos MarañonNessuna valutazione finora
- Fem 9511Documento3 pagineFem 9511Anibal MoralesNessuna valutazione finora
- IS0504Documento8 pagineIS0504Raul SolisNessuna valutazione finora
- Bootstrap Date PaginatorDocumento9 pagineBootstrap Date PaginatorOsmel Calderon BernalNessuna valutazione finora
- 7 Areas y VolumenesDocumento4 pagine7 Areas y VolumenesAleja OrozcoNessuna valutazione finora
- Compras Unidad IDocumento26 pagineCompras Unidad IChEmitha De XaRly BetHoNessuna valutazione finora