Potrebbero piacerti anche
- MAEG3920 - Chapter 10Documento50 pagineMAEG3920 - Chapter 10LeungSiuYapNessuna valutazione finora
- MAEG3920 - Chapter 5Documento34 pagineMAEG3920 - Chapter 5LeungSiuYapNessuna valutazione finora
- MAEG3920 - Chapter 8Documento49 pagineMAEG3920 - Chapter 8LeungSiuYapNessuna valutazione finora
- MAEG3920 - Chapter 9Documento18 pagineMAEG3920 - Chapter 9LeungSiuYapNessuna valutazione finora
- Yeek01 2014 I.A-I.EDocumento77 pagineYeek01 2014 I.A-I.ELeungSiuYapNessuna valutazione finora
- Engineering Design and Applications (MAEG3920Documento38 pagineEngineering Design and Applications (MAEG3920LeungSiuYapNessuna valutazione finora
- MAEG3920 - Chapter 4Documento39 pagineMAEG3920 - Chapter 4LeungSiuYapNessuna valutazione finora
- MAEG3920 - Chapter 7Documento19 pagineMAEG3920 - Chapter 7LeungSiuYapNessuna valutazione finora
- MAEG3920 - Chapter 6 RevisedDocumento46 pagineMAEG3920 - Chapter 6 RevisedLeungSiuYapNessuna valutazione finora
- MAEG3050Documento5 pagineMAEG3050LeungSiuYapNessuna valutazione finora
- Yeek07 2014 Iiib1 Iiib4Documento38 pagineYeek07 2014 Iiib1 Iiib4LeungSiuYapNessuna valutazione finora
- Yeek08 2014 IIIB5Documento41 pagineYeek08 2014 IIIB5LeungSiuYapNessuna valutazione finora
- Ii. Feedback Control SystemsDocumento32 pagineIi. Feedback Control SystemsLeungSiuYapNessuna valutazione finora
- MAEG3050Documento6 pagineMAEG3050LeungSiuYapNessuna valutazione finora
- Yeek04 2014 Iic IidDocumento23 pagineYeek04 2014 Iic IidLeungSiuYapNessuna valutazione finora
- Yeek03 2014 IIB1 IIB3Documento27 pagineYeek03 2014 IIB1 IIB3LeungSiuYapNessuna valutazione finora
- MAEG3050Documento5 pagineMAEG3050LeungSiuYapNessuna valutazione finora
- Yeek05 2014 Iiia1 Iiia2Documento24 pagineYeek05 2014 Iiia1 Iiia2LeungSiuYapNessuna valutazione finora
- MAEG3050Documento5 pagineMAEG3050LeungSiuYapNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Price List Grand I10 Nios DT 01.05.2022Documento1 paginaPrice List Grand I10 Nios DT 01.05.2022VijayNessuna valutazione finora
- Understanding the Four Aspects of EmotionsDocumento13 pagineUnderstanding the Four Aspects of EmotionsRaymond FaeldoñaNessuna valutazione finora
- Microsoft PowerPoint - ECHOCARDIOGRAPHY IN ADULT CONGENITAL HEART DISEASE PDFDocumento51 pagineMicrosoft PowerPoint - ECHOCARDIOGRAPHY IN ADULT CONGENITAL HEART DISEASE PDFHanafieHeluthNessuna valutazione finora
- RepairManual NEF M100 M150 P3D32N003E Mar06Documento172 pagineRepairManual NEF M100 M150 P3D32N003E Mar06manuel segovia100% (1)
- 1 5109354204116287644 PDFDocumento336 pagine1 5109354204116287644 PDFGerardoNessuna valutazione finora
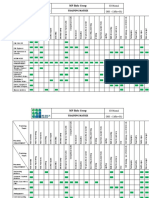
- MP Birla Group: Training MatrixDocumento3 pagineMP Birla Group: Training MatrixAprilia kusumaNessuna valutazione finora
- PHD Call - TCD - Micha Ruhl - PHD Project Short DescriptionDocumento2 paginePHD Call - TCD - Micha Ruhl - PHD Project Short DescriptionabuzarNessuna valutazione finora
- Coyle Chapter 2 PowerPoint SlidesDocumento33 pagineCoyle Chapter 2 PowerPoint SlidesKhaled Sheykh0% (1)
- GPS Navigator: ModelDocumento99 pagineGPS Navigator: ModelMain UddinNessuna valutazione finora
- r48 2000e3 Rectifier User ManualDocumento26 paginer48 2000e3 Rectifier User Manualjose luis rivera sotoNessuna valutazione finora
- Tajima Usb Linker User's GuideDocumento35 pagineTajima Usb Linker User's GuideFermin MuñozNessuna valutazione finora
- Chips Unlimited Blend LibraryDocumento20 pagineChips Unlimited Blend Librarymizan sallehNessuna valutazione finora
- MSE Admission and Degree RequirementsDocumento6 pagineMSE Admission and Degree Requirementsdeathbuddy_87Nessuna valutazione finora
- GadDocumento1 paginaGadFakhruddin DhilawalaNessuna valutazione finora
- Incorrect Fuel Level Indication RepairDocumento3 pagineIncorrect Fuel Level Indication RepairBogdan StefanNessuna valutazione finora
- Soal Big A Tukpd 2011-2012 RevisiDocumento5 pagineSoal Big A Tukpd 2011-2012 RevisiTriana WatiNessuna valutazione finora
- Finger Print Based Voting System For Rigging Free Governing SystemDocumento2 pagineFinger Print Based Voting System For Rigging Free Governing SystemArvind TilotiaNessuna valutazione finora
- Mtech Geotechnical Engineering 2016Documento48 pagineMtech Geotechnical Engineering 2016Venkatesh ThumatiNessuna valutazione finora
- Steam TurbineDocumento25 pagineSteam TurbineIshan JunejaNessuna valutazione finora
- Yamaha TT600RE Service ManualDocumento382 pagineYamaha TT600RE Service ManualStefan30393% (14)
- TOPFLYtech Product - April 2023 - 4GDocumento56 pagineTOPFLYtech Product - April 2023 - 4GmosorioNessuna valutazione finora
- Transmission Lines Explained for Efficiency and Loss ReductionDocumento25 pagineTransmission Lines Explained for Efficiency and Loss Reductionjagdish choudharyNessuna valutazione finora
- Experimental Validation of The BAC Factor Method For Lighting SystemsDocumento5 pagineExperimental Validation of The BAC Factor Method For Lighting SystemsJireh AngNessuna valutazione finora
- Exercise 56 - Narration and SequenceDocumento14 pagineExercise 56 - Narration and SequenceLéoKostasNessuna valutazione finora
- Auto IntroductionDocumento90 pagineAuto IntroductionShivanand ArwatNessuna valutazione finora
- Ruby and Pink Sapphire - IntroDocumento3 pagineRuby and Pink Sapphire - Introrazanym100% (1)
- Team Handball SG Pratt v2Documento2 pagineTeam Handball SG Pratt v2Peter StonesNessuna valutazione finora
- Table of PenaltiesDocumento2 pagineTable of PenaltiesEzekiel FernandezNessuna valutazione finora
- 405 Econometrics Odar N. Gujarati: Prof. M. El-SakkaDocumento27 pagine405 Econometrics Odar N. Gujarati: Prof. M. El-SakkaKashif KhurshidNessuna valutazione finora
- AIA Design Development Deliverable ListDocumento8 pagineAIA Design Development Deliverable Listpeterhwilliams100% (1)