Potrebbero piacerti anche
- Bosch Vp37 PumpsDocumento32 pagineBosch Vp37 PumpsLuís Fidalgo92% (13)
- AUTOSAR Partial Network NEWDocumento12 pagineAUTOSAR Partial Network NEWBasavaraj Navalgund100% (1)
- Data Acquisition from HD Vehicles Using J1939 CAN BusDa EverandData Acquisition from HD Vehicles Using J1939 CAN BusNessuna valutazione finora
- Can-Bus Svel 02Documento121 pagineCan-Bus Svel 02اشرينكيل مسونكيل100% (10)
- UDSDocumento20 pagineUDSjyothirmai100% (1)
- CANBus: (1) How It Works, (2) Case Applications For Nissan Leaf & Volvo S80Documento33 pagineCANBus: (1) How It Works, (2) Case Applications For Nissan Leaf & Volvo S80yogapost100% (3)
- An-IDG-1-010 How To Create UDS Protocol ServicesDocumento8 pagineAn-IDG-1-010 How To Create UDS Protocol Servicestotor42Nessuna valutazione finora
- Arduino Can Bus For Developing Industrial AutomatinoDocumento13 pagineArduino Can Bus For Developing Industrial Automatinokrish589267% (3)
- 1996 Toyota Land Cruiser Prado, RJ Modification - All Pics, Specs, Parts andDocumento4 pagine1996 Toyota Land Cruiser Prado, RJ Modification - All Pics, Specs, Parts andVincentius NikimNessuna valutazione finora
- Simple Car DynamicsDocumento16 pagineSimple Car DynamicsVincentius NikimNessuna valutazione finora
- Kart Basic Chassis SetupDocumento6 pagineKart Basic Chassis SetupVincentius NikimNessuna valutazione finora
- Implementation of CAN Bus in An Autonomous All-Terrain VehicleDocumento14 pagineImplementation of CAN Bus in An Autonomous All-Terrain VehiclePradeep CheekatlaNessuna valutazione finora
- CAN BusDocumento9 pagineCAN Buspablodanielrigo100% (2)
- The CAN BusDocumento3 pagineThe CAN BusaknabcdNessuna valutazione finora
- NI Tutorial 2732 enDocumento5 pagineNI Tutorial 2732 enmanumanu12Nessuna valutazione finora
- CAN Bus Electrical Interface CircuitDocumento9 pagineCAN Bus Electrical Interface CircuitJhonTorresRamiresNessuna valutazione finora
- CAN TutorialDocumento22 pagineCAN TutorialApoorva BhattNessuna valutazione finora
- Canbus IntroductionDocumento43 pagineCanbus Introductionenzzomolinari100% (1)
- Monitoring J1939 Diagnostic Trouble CodesDocumento9 pagineMonitoring J1939 Diagnostic Trouble CodesRafael CardenasNessuna valutazione finora
- Controller Area NetworkDocumento20 pagineController Area NetworkbonthanagabhushanamNessuna valutazione finora
- CAN BusDocumento32 pagineCAN BusMohammed AsharNessuna valutazione finora
- CAN BUS Analyzer ToolsDocumento32 pagineCAN BUS Analyzer Toolsadse2594100% (2)
- 1 CAN Higher Layer ProtocolsDocumento24 pagine1 CAN Higher Layer ProtocolsMarcelo BelingNessuna valutazione finora
- End To End Information About CANBUSDocumento18 pagineEnd To End Information About CANBUSjasmine100% (2)
- CAN Bus Explained - A Simple Intro (2019)Documento13 pagineCAN Bus Explained - A Simple Intro (2019)Hermawan 0103100% (1)
- CAN J1939StackManualDocumento67 pagineCAN J1939StackManualngntran75% (4)
- CANalyzer75 Manual enDocumento148 pagineCANalyzer75 Manual enAlfredoNessuna valutazione finora
- J1939 IntroductionDocumento2 pagineJ1939 Introductionjrsimma0% (1)
- Introduction To Canbus: Jason Mccomb FitasDocumento15 pagineIntroduction To Canbus: Jason Mccomb FitasMike100% (1)
- LIN BusDocumento4 pagineLIN BusMustafa ÖzdemirNessuna valutazione finora
- LIN TrainingDocumento46 pagineLIN TrainingThiago DomingosNessuna valutazione finora
- CAN ProtocolDocumento63 pagineCAN ProtocolBijaya Rana67% (3)
- CAN Mode 6Documento12 pagineCAN Mode 6Abdulbaset Selwy100% (1)
- I 14229Documento17 pagineI 14229krishnaNessuna valutazione finora
- Applications: AutomotiveDocumento8 pagineApplications: AutomotiveMohammad FaizalNessuna valutazione finora
- Protocol Automotive IndustryDocumento17 pagineProtocol Automotive IndustryUtpal100% (8)
- CAN BusDocumento11 pagineCAN BusDragan Lugonić100% (1)
- Can Test BoxDocumento3 pagineCan Test Boxjulio261Nessuna valutazione finora
- Diagnostics 2 Raetz LectureDocumento28 pagineDiagnostics 2 Raetz LectureSajan Jose100% (1)
- Sae j1939Documento24 pagineSae j1939Gabriel Hernandez Gaspar100% (3)
- CANoe Basic TrainingDocumento33 pagineCANoe Basic Trainingudaykiran patnaikNessuna valutazione finora
- Introduction To LIN (Local Interconnect Network)Documento11 pagineIntroduction To LIN (Local Interconnect Network)digitales100% (5)
- CAN Protocol Principles of Data ExchangeDocumento4 pagineCAN Protocol Principles of Data Exchangerenju88100% (1)
- Manual - 1.0Documento44 pagineManual - 1.0Jimmy AlemanNessuna valutazione finora
- An Overview of Controller Area Network (CAN) Technology: November 12, 2003Documento20 pagineAn Overview of Controller Area Network (CAN) Technology: November 12, 2003Dilyan MarinoffNessuna valutazione finora
- Can BusDocumento32 pagineCan BusSiddharth Chaudhury100% (3)
- J1939 Data Mapping ExplainedDocumento13 pagineJ1939 Data Mapping ExplainedRafael Cardenas100% (3)
- Can FD SpecDocumento34 pagineCan FD SpecPreetham BaskaranNessuna valutazione finora
- CAN Bus TutorialDocumento8 pagineCAN Bus TutorialVincentius Nikim100% (1)
- CANape Basics WhitePaper enDocumento15 pagineCANape Basics WhitePaper enwlidhaaa0% (1)
- Can BusDocumento34 pagineCan Bushneto1975100% (4)
- An-Ind-1-007 Using Matlab With CanoeDocumento15 pagineAn-Ind-1-007 Using Matlab With CanoeCoolboy RoadsterNessuna valutazione finora
- j1939 Overview by KvaserDocumento17 paginej1939 Overview by KvaserRuberli de Lima100% (2)
- Engineer's Guide To CanbusDocumento16 pagineEngineer's Guide To Canbusdsldrvr100% (4)
- Remote Diagnostic SystemDocumento14 pagineRemote Diagnostic SystemBoopathirajaNessuna valutazione finora
- Unified Diagnostics Services Is The Diagnostics Communication Protocol in The ECUDocumento6 pagineUnified Diagnostics Services Is The Diagnostics Communication Protocol in The ECUaravindNessuna valutazione finora
- SAE J1939 ExtendedDocumento49 pagineSAE J1939 Extendedhamidh100% (4)
- Q&A - What Is SAE J1939?: (Source For The Following Answers: SAE HS-1939)Documento3 pagineQ&A - What Is SAE J1939?: (Source For The Following Answers: SAE HS-1939)Ponraj Govindarajan100% (1)
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusDa EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusNessuna valutazione finora
- CAN Bus DescriptionDocumento6 pagineCAN Bus DescriptionLuis Manuel GodoyNessuna valutazione finora
- IDC Slides 1Documento30 pagineIDC Slides 1Rahul EkhandeNessuna valutazione finora
- CAN TutorialDocumento22 pagineCAN TutorialNaveen BasavarajacharNessuna valutazione finora
- Computer Solutions LTD: CAN - A Brief TutorialDocumento7 pagineComputer Solutions LTD: CAN - A Brief Tutorialhitech_emi3591Nessuna valutazione finora
- CAN Bus TutorialDocumento8 pagineCAN Bus TutorialVincentius Nikim100% (1)
- ECD-V5 Injection Pump SystemDocumento42 pagineECD-V5 Injection Pump SystemVincentius Nikim100% (1)
- EML2322L Wheel Hub DesignDocumento5 pagineEML2322L Wheel Hub DesignVincentius NikimNessuna valutazione finora
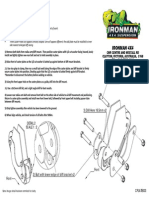
- Ironman 4X4: GQ, GU Series With Coil Springs 5 Degree Caster Plates For 130mm - 170mm LiftsDocumento1 paginaIronman 4X4: GQ, GU Series With Coil Springs 5 Degree Caster Plates For 130mm - 170mm LiftsVincentius NikimNessuna valutazione finora
- AUTT 1050 Automotive Suspension and Steering Systems: Master Course SyllabusDocumento5 pagineAUTT 1050 Automotive Suspension and Steering Systems: Master Course SyllabusVincentius NikimNessuna valutazione finora
- Chapter 67 AlignmentDocumento25 pagineChapter 67 AlignmentVincentius NikimNessuna valutazione finora
- Mechanisms With Lower PairsDocumento43 pagineMechanisms With Lower PairsVincentius NikimNessuna valutazione finora
- Suspension 001Documento26 pagineSuspension 001Vincentius NikimNessuna valutazione finora
- Alignment Angle EffectsDocumento5 pagineAlignment Angle EffectsVincentius NikimNessuna valutazione finora
- Steering and Turning Vehicles 1Documento24 pagineSteering and Turning Vehicles 1Vincentius NikimNessuna valutazione finora
- Engine Cdi PDFDocumento78 pagineEngine Cdi PDFSergio Sanchez Rocha94% (16)
- Lenovo Yoga Book Ug en v1.0 201611Documento28 pagineLenovo Yoga Book Ug en v1.0 201611Oscar Ahumada G.Nessuna valutazione finora
- Chapter 1 - Web 1.0 Web 2.0 and Web 3.0Documento14 pagineChapter 1 - Web 1.0 Web 2.0 and Web 3.0sunil.kelkarNessuna valutazione finora
- OPC Error CodesDocumento496 pagineOPC Error CodesViola AngyalNessuna valutazione finora
- Dacnewppt p4Documento21 pagineDacnewppt p4vmspraneethNessuna valutazione finora
- IGCSE ICT - Turtle GraphicsDocumento4 pagineIGCSE ICT - Turtle GraphicsTahpehs PhiriNessuna valutazione finora
- Pantech SolutionsDocumento22 paginePantech SolutionsPantech ProLabs India Pvt LtdNessuna valutazione finora
- Inf FAB3Documento108 pagineInf FAB3ganeshs0509Nessuna valutazione finora
- Bit All Branches SS2011 Res PDFDocumento10 pagineBit All Branches SS2011 Res PDFSanam1378Nessuna valutazione finora
- VIIRS 375m Active Fire Science Processing Algorithm (VFIRE375 - SPA) User's GuideDocumento10 pagineVIIRS 375m Active Fire Science Processing Algorithm (VFIRE375 - SPA) User's GuideNithindev GuttikondaNessuna valutazione finora
- Resume - Monta, Camille HanzelDocumento3 pagineResume - Monta, Camille HanzelCathy AndayaNessuna valutazione finora
- System Programing Solve 1Documento14 pagineSystem Programing Solve 1Surendra Singh ChauhanNessuna valutazione finora
- SJ-20141230091957-001-ZTE UniPOS NetMAX GSM (V14.40) User Manual - 615375Documento185 pagineSJ-20141230091957-001-ZTE UniPOS NetMAX GSM (V14.40) User Manual - 615375Camilo Bazan Heredia100% (1)
- SSR - IsgDocumento2 pagineSSR - IsgMark Alyson NginaNessuna valutazione finora
- Xerox 7245 Fault Codes PDFDocumento28 pagineXerox 7245 Fault Codes PDFcataroxi88% (8)
- SCSI Internal Pinout Diagram at PinoutsDocumento3 pagineSCSI Internal Pinout Diagram at PinoutsNabendu Ghosh0% (1)
- Fortigate 80C QuickstartDocumento2 pagineFortigate 80C QuickstartZbrda ZdolaNessuna valutazione finora
- Integrated Atapi DVD Drive Manager: Fully Integrated Chip For Game Consoles and DVD Players/RomsDocumento2 pagineIntegrated Atapi DVD Drive Manager: Fully Integrated Chip For Game Consoles and DVD Players/RomscasaswqNessuna valutazione finora
- ZXV10 H108LDocumento86 pagineZXV10 H108LTarekNessuna valutazione finora
- Mxum PDFDocumento181 pagineMxum PDFandersonfapNessuna valutazione finora
- Activity 7.4.2 Challenge DHCP and NAT ConfigurationDocumento5 pagineActivity 7.4.2 Challenge DHCP and NAT ConfigurationMirza Cerim0% (1)
- What Is A Distributed System ??Documento8 pagineWhat Is A Distributed System ??svakinkNessuna valutazione finora
- Item: 1 (Ref:Cert-70-290.1.2.1)Documento69 pagineItem: 1 (Ref:Cert-70-290.1.2.1)wololoNessuna valutazione finora
- Cse Btech2016-17Documento25 pagineCse Btech2016-17Vruttant Balde (Nyuke)Nessuna valutazione finora
- Aoe3loader Readme 0.3Documento3 pagineAoe3loader Readme 0.3jmathis9223Nessuna valutazione finora
- BIOSDocumento58 pagineBIOSfaustoNessuna valutazione finora
- Expansion Modules Exp Series Page 26-2Documento6 pagineExpansion Modules Exp Series Page 26-2RobiNessuna valutazione finora
- Quick Guide - Restore Default PasswordDocumento13 pagineQuick Guide - Restore Default PasswordluisvillasecaretoNessuna valutazione finora
- How To Use X-Arcade Raspberry PI - Xgaming PDFDocumento7 pagineHow To Use X-Arcade Raspberry PI - Xgaming PDFdottorfigusNessuna valutazione finora
- Technical Code: MCMC MTSFB TC T015:2017Documento14 pagineTechnical Code: MCMC MTSFB TC T015:2017seanNessuna valutazione finora
- HP Storeonce 2700, 2900, 4500 and 4700 Backup System: Installation and Configuration GuideDocumento130 pagineHP Storeonce 2700, 2900, 4500 and 4700 Backup System: Installation and Configuration GuideMikel RichieNessuna valutazione finora