Potrebbero piacerti anche
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsDa EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNessuna valutazione finora
- Real-Time Simulation Technology for Modern Power ElectronicsDa EverandReal-Time Simulation Technology for Modern Power ElectronicsNessuna valutazione finora
- Simulation of Transients in Unerground Cables With Frequency Dependent ModalDocumento12 pagineSimulation of Transients in Unerground Cables With Frequency Dependent ModalMadhusudhan Srinivasan100% (1)
- Induction Motor Control Through AC DC AC ConverterDocumento7 pagineInduction Motor Control Through AC DC AC ConverterJohn CollinsNessuna valutazione finora
- Dynamic Model of Induction Motors For Vector ControlDocumento10 pagineDynamic Model of Induction Motors For Vector ControlMarica RalucaNessuna valutazione finora
- Exercise 2Documento1 paginaExercise 2ahmadbakroNessuna valutazione finora
- Symmetrical ComponentsDocumento8 pagineSymmetrical Componentssrikanth velpulaNessuna valutazione finora
- Complex Vector Model of The Squirrel Cage Induction Machine Including Instantaneous Rotor Bar CurrentsDocumento8 pagineComplex Vector Model of The Squirrel Cage Induction Machine Including Instantaneous Rotor Bar CurrentsJorge Luis SotoNessuna valutazione finora
- Tutorial - DC SystemDocumento50 pagineTutorial - DC SystemCarlos PuertoNessuna valutazione finora
- Improvement of Voltage Profile Through The Optimal Placement of FACTS Using L-Index MethodDocumento5 pagineImprovement of Voltage Profile Through The Optimal Placement of FACTS Using L-Index MethodRavishankar KankaleNessuna valutazione finora
- Magnetic Equivalent Circuit ModelingDocumento12 pagineMagnetic Equivalent Circuit ModelingJavad Rahmany FardNessuna valutazione finora
- Solution To The Positive Real Control Problem For Linear Time-Invariant SystemsDocumento13 pagineSolution To The Positive Real Control Problem For Linear Time-Invariant SystemsRohit GandhiNessuna valutazione finora
- Regulatory Compliance and Generator ControlDocumento59 pagineRegulatory Compliance and Generator ControlsulemankhalidNessuna valutazione finora
- Load Flow AnalysisDocumento12 pagineLoad Flow AnalysisHendra Dwi RamadhanNessuna valutazione finora
- Determination of Instantaneous Currents and Voltages by Means of Alpha, Beta, and Zero ComponentsDocumento8 pagineDetermination of Instantaneous Currents and Voltages by Means of Alpha, Beta, and Zero ComponentsEmre Özer100% (1)
- Feedback Amplifiers Analysis PDFDocumento2 pagineFeedback Amplifiers Analysis PDFDanNessuna valutazione finora
- Improved Active Power Filter Performance For Renewable Power Generation SystemsDocumento8 pagineImproved Active Power Filter Performance For Renewable Power Generation SystemsKuncham SateeshNessuna valutazione finora
- Component of HVDC Transmission NetworkDocumento5 pagineComponent of HVDC Transmission NetworkIqbalilah RamdaniNessuna valutazione finora
- Model Development and Validation of Brushless ExcitersDocumento8 pagineModel Development and Validation of Brushless ExcitersAmberMeerabNessuna valutazione finora
- Steady-State Stability Limit Studies Using Matlab SimulationDocumento12 pagineSteady-State Stability Limit Studies Using Matlab SimulationPius OdabaNessuna valutazione finora
- Impact of AVR On StabilityDocumento44 pagineImpact of AVR On StabilityMamta MrjnNessuna valutazione finora
- Poweremt: Protection System Analysis and Testing Using Electro-Magnetic Transients SimulationDocumento48 paginePoweremt: Protection System Analysis and Testing Using Electro-Magnetic Transients Simulationdebajyoti ghoshNessuna valutazione finora
- bjorckLSbSolving Linear Least Squares Problems by Orthogonal Gramschmidt OrthogonalizationDocumento21 paginebjorckLSbSolving Linear Least Squares Problems by Orthogonal Gramschmidt Orthogonalizationdgh3Nessuna valutazione finora
- Matrix ExponentialDocumento14 pagineMatrix Exponentialvignesh0617Nessuna valutazione finora
- A New Method For Online Thyristor Conduction Monitoring Based On Thyristor Current Waveform Recording in Static Excitation SystemDocumento6 pagineA New Method For Online Thyristor Conduction Monitoring Based On Thyristor Current Waveform Recording in Static Excitation SystemR0B0T2013Nessuna valutazione finora
- 1980 - Stable Adaptive Controller Design, Part II - Proof of Stability (Narendra)Documento9 pagine1980 - Stable Adaptive Controller Design, Part II - Proof of Stability (Narendra)ademargcjuniorNessuna valutazione finora
- Programacion Atp-EmtpDocumento9 pagineProgramacion Atp-EmtpGennaroNessuna valutazione finora
- Eee 205-W1Documento24 pagineEee 205-W1mahamudul hasan100% (1)
- IEEE 34 Bus Intermittent Sources PDFDocumento8 pagineIEEE 34 Bus Intermittent Sources PDFKancherla SameeraNessuna valutazione finora
- (2 2) Short Circuit CalculationDocumento38 pagine(2 2) Short Circuit CalculationElectro Tractrix100% (1)
- Circuit Daigrams and FormulasDocumento12 pagineCircuit Daigrams and Formulasvish5936Nessuna valutazione finora
- CVT Test & Digital SimulationDocumento6 pagineCVT Test & Digital SimulationMichael Parohinog GregasNessuna valutazione finora
- A Review Article On Integrator Circuits Using Various Active DevicesDocumento7 pagineA Review Article On Integrator Circuits Using Various Active DevicesRaja ChandruNessuna valutazione finora
- Fault Detection On Radial Power Distribution Systems Using Fuzzy LogicDocumento8 pagineFault Detection On Radial Power Distribution Systems Using Fuzzy LogicDa DebebeNessuna valutazione finora
- BOOK4 PsDocumento128 pagineBOOK4 Psgoyo2kNessuna valutazione finora
- On FACTSDocumento33 pagineOn FACTSAravind Babu100% (1)
- Generator Capability Curve Constraint For PSO Based Optimal Power FlowDocumento6 pagineGenerator Capability Curve Constraint For PSO Based Optimal Power FlowAvinash PathakNessuna valutazione finora
- A Practical Method For Load Balancing in The LV Distribution Networks Case Study Tabriz Electrical NetworkDocumento6 pagineA Practical Method For Load Balancing in The LV Distribution Networks Case Study Tabriz Electrical NetworkTanaka MasochaNessuna valutazione finora
- Testing Alpha Plane Characteristic Paper IPTS 2011 Munro ENUDocumento21 pagineTesting Alpha Plane Characteristic Paper IPTS 2011 Munro ENUJose Antonio Huamani ChuquirimayNessuna valutazione finora
- AC TheoryDocumento10 pagineAC TheoryshrnbolonneNessuna valutazione finora
- System Monitoring AND Control: Unit 7Documento18 pagineSystem Monitoring AND Control: Unit 7vishal100% (1)
- Simulation of Electric Machine and Drive Systems Using Matlab and SimulinkDocumento17 pagineSimulation of Electric Machine and Drive Systems Using Matlab and SimulinkSamuel Alves de SouzaNessuna valutazione finora
- NERC Protection System Protection Fundamentals Public 060210Documento55 pagineNERC Protection System Protection Fundamentals Public 060210srinivasaphanikiranNessuna valutazione finora
- Voltage Sag and Interruptions-2Documento112 pagineVoltage Sag and Interruptions-2raghav4life8724Nessuna valutazione finora
- Unsymmetrical Fault AnalysisDocumento15 pagineUnsymmetrical Fault Analysiszeemred085100% (1)
- CorrectDocumento3 pagineCorrectapi-3779248Nessuna valutazione finora
- EE2092!1!2011 FundamentalsDocumento84 pagineEE2092!1!2011 FundamentalsshrnbolonneNessuna valutazione finora
- Fault Detection On Radial Power DistributionDocumento15 pagineFault Detection On Radial Power DistributionJuan CarlosNessuna valutazione finora
- Chapter 12Documento38 pagineChapter 12Deivasigamani SubramaniyanNessuna valutazione finora
- Power System Stabliser: A ReviewDocumento71 paginePower System Stabliser: A ReviewPiyush AgnihotriNessuna valutazione finora
- Applying PSS GenConceptsDocumento30 pagineApplying PSS GenConceptsAnonymous 1880JHcGNessuna valutazione finora
- A Refined HVDC Control SystemDocumento10 pagineA Refined HVDC Control Systemshawnr7376Nessuna valutazione finora
- Process Control Instrumentation Technology 8th EdDocumento22 pagineProcess Control Instrumentation Technology 8th EdmitulNessuna valutazione finora
- Built in Function in MatlabDocumento6 pagineBuilt in Function in MatlabJitul RajbongshiNessuna valutazione finora
- Variable Speed AC Drives with Inverter Output FiltersDa EverandVariable Speed AC Drives with Inverter Output FiltersNessuna valutazione finora
- Integration of Green and Renewable Energy in Electric Power SystemsDa EverandIntegration of Green and Renewable Energy in Electric Power SystemsNessuna valutazione finora
- Optimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryDa EverandOptimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryNessuna valutazione finora
- Digital Signal Processing Systems: Implementation Techniques: Advances in Theory and ApplicationsDa EverandDigital Signal Processing Systems: Implementation Techniques: Advances in Theory and ApplicationsNessuna valutazione finora
- The Effect of DC Offset On Current-Operated RelaysDocumento5 pagineThe Effect of DC Offset On Current-Operated Relayseubis_machado4370Nessuna valutazione finora
- Vector Fitting Versus Levenberg-Marquardt PDFDocumento8 pagineVector Fitting Versus Levenberg-Marquardt PDFeubis_machado4370Nessuna valutazione finora
- Saturacion de TC S y Su Impacto en Reles DigitalesDocumento7 pagineSaturacion de TC S y Su Impacto en Reles DigitalesMark CoolNessuna valutazione finora
- Tuning of PID Controller Using Ziegler-Nichols Method For Speed Control of DC MotorDocumento6 pagineTuning of PID Controller Using Ziegler-Nichols Method For Speed Control of DC Motoreubis_machado4370Nessuna valutazione finora
- Feedback Linearization of DC Motors - Theory and ExperimentDocumento8 pagineFeedback Linearization of DC Motors - Theory and Experimenteubis_machado4370Nessuna valutazione finora
- Paper G 21Documento5 paginePaper G 21eubis_machado4370Nessuna valutazione finora
- PS3-02 A Coupling Capacitor Voltage Transformer ModelDocumento8 paginePS3-02 A Coupling Capacitor Voltage Transformer Modeleubis_machado4370Nessuna valutazione finora
- Slide bài giảng Kỹ thuật Điện ĐH Bách Khoa TpHCMDocumento142 pagineSlide bài giảng Kỹ thuật Điện ĐH Bách Khoa TpHCMKhoa LeNessuna valutazione finora
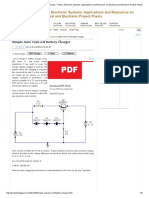
- Simple Auto Turn-Off Battery ChargerDocumento5 pagineSimple Auto Turn-Off Battery ChargerdewasuryantoNessuna valutazione finora
- Wind Tunnels, Test Stands: and ComponentsDocumento20 pagineWind Tunnels, Test Stands: and ComponentsLuiz CostaNessuna valutazione finora
- Lab5 Eecs2200Documento6 pagineLab5 Eecs2200Md Aminul HaqueNessuna valutazione finora
- Code: Indian Electricity Rules / Central Electricity AuthorityDocumento5 pagineCode: Indian Electricity Rules / Central Electricity AuthorityAravindNessuna valutazione finora
- Applied Physics by M KumarDocumento43 pagineApplied Physics by M KumarheloverNessuna valutazione finora
- 6.5.1 Earthing Systems Basic Constructional AspectsDocumento16 pagine6.5.1 Earthing Systems Basic Constructional AspectsbehnamatgNessuna valutazione finora
- Control Relay: NKG3 Time SwitchDocumento2 pagineControl Relay: NKG3 Time SwitchRafatNessuna valutazione finora
- GeneralPhysics1 Q2 Module-2 Gravity v5Documento25 pagineGeneralPhysics1 Q2 Module-2 Gravity v5rexilldatorNessuna valutazione finora
- Lorentz Force LawDocumento5 pagineLorentz Force LawJaka RamadhanNessuna valutazione finora
- Fuse Selection ProcessDocumento8 pagineFuse Selection Processbiswajit04Nessuna valutazione finora
- Standards For AC MotorsDocumento37 pagineStandards For AC MotorsPandaGendut100% (1)
- DC Current Interruption in HVDC SF6 Gas MRTB by Means of Self-Excited Oscillation SuperimpositionDocumento7 pagineDC Current Interruption in HVDC SF6 Gas MRTB by Means of Self-Excited Oscillation SuperimpositionaNessuna valutazione finora
- Si Brochure Draft ch123 PDFDocumento29 pagineSi Brochure Draft ch123 PDFJosuè Omar GuevaraNessuna valutazione finora
- 2021 MRSM Physics K1 - K2 JawapanDocumento14 pagine2021 MRSM Physics K1 - K2 Jawapan黎筱淳Nessuna valutazione finora
- Structure of A Turbulent Separation BubbleDocumento31 pagineStructure of A Turbulent Separation BubbleThành Phát DươngNessuna valutazione finora
- LD7750 DS 00b PDFDocumento20 pagineLD7750 DS 00b PDFgotcha75100% (1)
- Electrical EnergyDocumento28 pagineElectrical Energykyn mairen rodriguezNessuna valutazione finora
- SSD Datasheet PDFDocumento1 paginaSSD Datasheet PDFkisan singhNessuna valutazione finora
- SJVN Question Paper With Answer-2013 For EeeDocumento19 pagineSJVN Question Paper With Answer-2013 For EeeSatnam Singh100% (1)
- Stoichiometry Calculations With Chemical FormulasDocumento55 pagineStoichiometry Calculations With Chemical FormulassaneleNessuna valutazione finora
- Electronics: Automatic Voltage RegulatorDocumento7 pagineElectronics: Automatic Voltage RegulatorOleksandr Cheban-Lianka50% (2)
- Fundamentals of Automotive Electricity & ElectronicsDocumento83 pagineFundamentals of Automotive Electricity & ElectronicsJohnny Ym100% (1)
- Air-Conditioning Lexicon - A To Z Index - StulzDocumento7 pagineAir-Conditioning Lexicon - A To Z Index - StulzAnkesh RajNessuna valutazione finora
- Design and Development of A Transmission System For An All-Terrain VehicleDocumento7 pagineDesign and Development of A Transmission System For An All-Terrain VehicleAnonymous kw8Yrp0R5rNessuna valutazione finora
- Unidad #2 Centroids and Centre of GravityDocumento37 pagineUnidad #2 Centroids and Centre of GravityAnna E A. Camaño100% (2)
- P RT/ (V - B) - A/v P RT/V V RT/P: Do Problem 40 in Chapter 1Documento45 pagineP RT/ (V - B) - A/v P RT/V V RT/P: Do Problem 40 in Chapter 1AleksaNessuna valutazione finora
- Explanation TextDocumento1 paginaExplanation TextTrianda Ayuning Tyas100% (1)
- 6.1 Refraction of LightDocumento13 pagine6.1 Refraction of LightNovah Mary A/P Guruloo IPGKTAR100% (1)