Potrebbero piacerti anche
- Employability Skills: Brush up Your ElectronicsDa EverandEmployability Skills: Brush up Your ElectronicsNessuna valutazione finora
- Application of Optical SensorsDocumento5 pagineApplication of Optical SensorsBhalchandra MurariNessuna valutazione finora
- Lab 2: AC Measurements-Capacitors and Inductors: Prerequisite Reference MaterialsDocumento10 pagineLab 2: AC Measurements-Capacitors and Inductors: Prerequisite Reference MaterialsLeandro ArvattiNessuna valutazione finora
- ICS Lab ManualDocumento28 pagineICS Lab Manualashok_abclNessuna valutazione finora
- Instrumentation Lab ManualDocumento14 pagineInstrumentation Lab ManualAmulyaNessuna valutazione finora
- The OscilloscopeDocumento5 pagineThe OscilloscopeSadiq IdrisNessuna valutazione finora
- Position Sensor: D KA CDocumento8 paginePosition Sensor: D KA CJamalkhanNessuna valutazione finora
- Lab2 Small Signal DiodeDocumento3 pagineLab2 Small Signal DiodePrincess Roxas CristobalNessuna valutazione finora
- Signal Flow - Instrument Sensor Transducer PLC - jpg1653x483 56.9 KBDocumento7 pagineSignal Flow - Instrument Sensor Transducer PLC - jpg1653x483 56.9 KBsakthisriniNessuna valutazione finora
- Voltage Divider ExperimentDocumento14 pagineVoltage Divider ExperimentDave Vic Solis100% (2)
- Experiment 1: Experiment 1: Introduction To Laboratory InstrumentsDocumento4 pagineExperiment 1: Experiment 1: Introduction To Laboratory InstrumentsWaseem HaiderNessuna valutazione finora
- International Islamic University, Islamabad: Faculty of Engineering and TechnologyDocumento10 pagineInternational Islamic University, Islamabad: Faculty of Engineering and TechnologyLovely JuttNessuna valutazione finora
- Transducer Manual NewDocumento17 pagineTransducer Manual NewSARDAR PATELNessuna valutazione finora
- Cable Fault DetectorDocumento25 pagineCable Fault DetectorHarshalNessuna valutazione finora
- Experiment 4 AC Measurents RC A RL Ckts 210330Documento7 pagineExperiment 4 AC Measurents RC A RL Ckts 210330MK MillyNessuna valutazione finora
- Experiment1-Multimeter, Oscilloscope and Function GeneratorDocumento11 pagineExperiment1-Multimeter, Oscilloscope and Function GeneratorHilmi SulimanNessuna valutazione finora
- Simulation of Extra High Voltage Long Transmission LinesDocumento18 pagineSimulation of Extra High Voltage Long Transmission LinesAaryarohit NaskarNessuna valutazione finora
- Adi Design SolutionDocumento7 pagineAdi Design SolutionMark John Servado AgsalogNessuna valutazione finora
- Biomedical Instrumentation: Prof. Dr. Nizamettin AYDINDocumento81 pagineBiomedical Instrumentation: Prof. Dr. Nizamettin AYDINAbraiz Khan KhattakNessuna valutazione finora
- 11N407-Sensors and Transducers Lab ManualDocumento74 pagine11N407-Sensors and Transducers Lab ManualrameswariNessuna valutazione finora
- Experiment 1 FamiliarizationDocumento7 pagineExperiment 1 FamiliarizationSeif-El-Islam BayNessuna valutazione finora
- Solenoid Lab ManualDocumento17 pagineSolenoid Lab Manualbrandon999Nessuna valutazione finora
- Introduction To Lab EquipmentDocumento5 pagineIntroduction To Lab EquipmentKashif Mujeeb Abdul MujeebNessuna valutazione finora
- Universal Current SensorDocumento12 pagineUniversal Current SensorBhargav MushiniNessuna valutazione finora
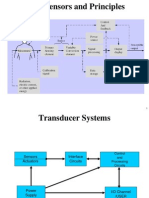
- Basic Sensors and PrinciplesDocumento80 pagineBasic Sensors and Principlesmparanthaman2Nessuna valutazione finora
- Types of Transducer and ApplicationDocumento31 pagineTypes of Transducer and ApplicationcocojithuNessuna valutazione finora
- IV Characteristic TransistorDocumento7 pagineIV Characteristic TransistorNida RidzuanNessuna valutazione finora
- Types of Transducers and Their Applications: Instrumentation and Product TestingDocumento31 pagineTypes of Transducers and Their Applications: Instrumentation and Product TestingFemi PrinceNessuna valutazione finora
- Lab ReportDocumento12 pagineLab ReportSarah HarunNessuna valutazione finora
- Experiment 11Documento8 pagineExperiment 11Mihai BogdanNessuna valutazione finora
- Battery Management System (BMS) EE401 Final ReportDocumento26 pagineBattery Management System (BMS) EE401 Final ReportOzgur M. DumanNessuna valutazione finora
- Types of Transducers and Their Applications: Instrumentation and Product TestingDocumento31 pagineTypes of Transducers and Their Applications: Instrumentation and Product TestingvikasinmumbaiNessuna valutazione finora
- Electric Circuits I: Laboratory Guide ForDocumento67 pagineElectric Circuits I: Laboratory Guide ForMisa KurobaneNessuna valutazione finora
- Lab 1 Full ReportDocumento15 pagineLab 1 Full ReportYann YeuNessuna valutazione finora
- Introduction To The Oscilloscope: 10.1 1.1.1 ObjectivesDocumento15 pagineIntroduction To The Oscilloscope: 10.1 1.1.1 Objectivesqwert 12345Nessuna valutazione finora
- Topic 3 Oscilloscope and Signal GeneratorDocumento24 pagineTopic 3 Oscilloscope and Signal GeneratorChinNessuna valutazione finora
- Unit-3-Relaying - Static RelaysDocumento62 pagineUnit-3-Relaying - Static Relayssubbu2051Nessuna valutazione finora
- Labreport ThreeDocumento8 pagineLabreport ThreeTeshome GirmaNessuna valutazione finora
- Team Revolver: EP 391 MicroprocessorsDocumento21 pagineTeam Revolver: EP 391 MicroprocessorsIan BryanNessuna valutazione finora
- Unit 5 Displacement, Velocity and Acceleration MeasurementDocumento26 pagineUnit 5 Displacement, Velocity and Acceleration Measurementbhuyanuttam7Nessuna valutazione finora
- Displacement Sensors: 1. Resistance Based and Optical Incremental Sensors of Position TaskDocumento7 pagineDisplacement Sensors: 1. Resistance Based and Optical Incremental Sensors of Position TaskBoobalan ThirugnanasambandamNessuna valutazione finora
- Faculty ManualDocumento60 pagineFaculty ManualCookiesNessuna valutazione finora
- Efca 2 Lab 1vDocumento8 pagineEfca 2 Lab 1vM Fa RizNessuna valutazione finora
- Student ManualDocumento61 pagineStudent ManualCookiesNessuna valutazione finora
- Senzori Capacitive Pentru Deplasari LiniareDocumento10 pagineSenzori Capacitive Pentru Deplasari LiniarePira PaulNessuna valutazione finora
- Chap4 AcDcmeter New DiplomaDocumento45 pagineChap4 AcDcmeter New DiplomaSepul SisiputNessuna valutazione finora
- Project 2 ElectronicDocumento23 pagineProject 2 ElectronicOmar Eduardo Rios GuzmanNessuna valutazione finora
- PDF - Development of A Digital Phase Angle MeterDocumento6 paginePDF - Development of A Digital Phase Angle MeterZuriel MontielNessuna valutazione finora
- Lab 9Documento13 pagineLab 9Abu BakarNessuna valutazione finora
- Interpretation of ResultsDocumento3 pagineInterpretation of ResultsJulian CaminaNessuna valutazione finora
- EE - 111 Basic Electronics: Experiment # 1Documento8 pagineEE - 111 Basic Electronics: Experiment # 1khazima UmairNessuna valutazione finora
- Lecture 4: Measuring Instruments and Power/Signal Sources: 1-Digital MultimeterDocumento8 pagineLecture 4: Measuring Instruments and Power/Signal Sources: 1-Digital MultimeterHuzaifa RehanNessuna valutazione finora
- 2dcmeter 120904024818 Phpapp01Documento38 pagine2dcmeter 120904024818 Phpapp01Imran AbdullahNessuna valutazione finora
- Electronic Workshop 2nd Experiment3Documento9 pagineElectronic Workshop 2nd Experiment3chinnuNessuna valutazione finora
- Familiarization of Electronic Measuring InstrumentsDocumento9 pagineFamiliarization of Electronic Measuring Instrumentschinnu0% (1)
- 12th Electronics Most Likely Questions SetDocumento19 pagine12th Electronics Most Likely Questions SetomdombareNessuna valutazione finora
- Displacement, and Proximity Sensor: PositionDocumento31 pagineDisplacement, and Proximity Sensor: PositionapuroopmNessuna valutazione finora
- Effective Multi-Tap TransformerDocumento8 pagineEffective Multi-Tap Transformer15101980Nessuna valutazione finora
- AN209 Magnetic Current Sensing PDFDocumento7 pagineAN209 Magnetic Current Sensing PDFkhers_zalNessuna valutazione finora
- Factsheet CRC Sfa en-PDF 1Documento1 paginaFactsheet CRC Sfa en-PDF 127189Nessuna valutazione finora
- Pain Mechanism Summary TableDocumento1 paginaPain Mechanism Summary Table27189Nessuna valutazione finora
- Circle With Trig Ratios and AnglesDocumento1 paginaCircle With Trig Ratios and Angles27189Nessuna valutazione finora
- Ecosport: Quick Reference GuideDocumento10 pagineEcosport: Quick Reference Guide27189Nessuna valutazione finora
- Triathlon Times ChartsDocumento22 pagineTriathlon Times Charts27189Nessuna valutazione finora
- Circle With Trig Ratios and AnglesDocumento1 paginaCircle With Trig Ratios and Angles27189Nessuna valutazione finora
- Circle With Trig Ratios and AnglesDocumento1 paginaCircle With Trig Ratios and Angles27189Nessuna valutazione finora
- Soccer CardsDocumento200 pagineSoccer Cards27189Nessuna valutazione finora
- The Fibonacci Sequence ExplainedDocumento8 pagineThe Fibonacci Sequence Explained27189Nessuna valutazione finora
- Lab 2Documento6 pagineLab 227189Nessuna valutazione finora
- Circle With Trig Ratios and AnglesDocumento1 paginaCircle With Trig Ratios and Angles27189Nessuna valutazione finora
- Lab 1-Equipment Overview Final PDFDocumento6 pagineLab 1-Equipment Overview Final PDF27189Nessuna valutazione finora
- 0-To Know - 1Documento1 pagina0-To Know - 127189Nessuna valutazione finora
- Note 6Documento9 pagineNote 6Shqiperia TiranaNessuna valutazione finora
- The Fibonacci Sequence ExplainedDocumento8 pagineThe Fibonacci Sequence Explained27189Nessuna valutazione finora
- The Fibonacci Sequence ExplainedDocumento8 pagineThe Fibonacci Sequence Explained27189Nessuna valutazione finora
- DTR100Documento56 pagineDTR100SUNYAOZONGNessuna valutazione finora
- Roel Keyfob Module - Installation and Operating InstructionsDocumento1 paginaRoel Keyfob Module - Installation and Operating InstructionsChristos TsaldarisNessuna valutazione finora
- 2nd Order ExampleDocumento25 pagine2nd Order ExampleMagdy RiadNessuna valutazione finora
- Module No E04 LV SwitchgearDocumento53 pagineModule No E04 LV Switchgearhizbi7100% (1)
- Unit IIIDocumento23 pagineUnit IIIudhayabarathiNessuna valutazione finora
- SBAS365710027ENR0Documento24 pagineSBAS365710027ENR0Rizqi PerdanaNessuna valutazione finora
- B-63494EN - 01 - Fin (Dual Check Safety Ops Man)Documento268 pagineB-63494EN - 01 - Fin (Dual Check Safety Ops Man)nzbradNessuna valutazione finora
- Design Toolkit SolarPV Offgrid GreenEmpowerment V2Documento105 pagineDesign Toolkit SolarPV Offgrid GreenEmpowerment V2Baset laliNessuna valutazione finora
- Elek TrimDocumento23 pagineElek Trimsri_handainaNessuna valutazione finora
- 3-Phase Motor Drives W Oscilloscope 48W-73863-0Documento31 pagine3-Phase Motor Drives W Oscilloscope 48W-73863-0CarloNessuna valutazione finora
- Belden 8777 Data SheetDocumento2 pagineBelden 8777 Data SheetCá ThuNessuna valutazione finora
- TTC 1000Documento2 pagineTTC 1000svismaelNessuna valutazione finora
- AutosequencesDocumento98 pagineAutosequencesJhonatanNessuna valutazione finora
- 44AD0600-0000-E.04-01A4-A4 - Datasheet For LV Induction MotorDocumento7 pagine44AD0600-0000-E.04-01A4-A4 - Datasheet For LV Induction MotorAvinash ShuklaNessuna valutazione finora
- English User Manual K3110Documento14 pagineEnglish User Manual K3110rohitrizNessuna valutazione finora
- Advisory On E - RegistrationDocumento60 pagineAdvisory On E - RegistrationSaugato MondalNessuna valutazione finora
- Samsung Spinpoint m8 DatasheetDocumento1 paginaSamsung Spinpoint m8 DatasheetHAZZCAVNessuna valutazione finora
- Product Manual 26833 (Revision C, 11/2022) : Tecjet™ 52 Gen IiDocumento88 pagineProduct Manual 26833 (Revision C, 11/2022) : Tecjet™ 52 Gen Iiardhanteknik53Nessuna valutazione finora
- EPIC32BDocumento1 paginaEPIC32BAnyie EliasNessuna valutazione finora
- 74HC HCTDocumento28 pagine74HC HCTEduardo ParadaNessuna valutazione finora
- 1MRK505346-BEN B en Product Guide Line Differential Protection RED670 2.1Documento138 pagine1MRK505346-BEN B en Product Guide Line Differential Protection RED670 2.1Mạc DavidNessuna valutazione finora
- Basics of Servo Motor, It's Advantages and Disadvantages - Electrical - Industrial Automation, PLC Programming, Scada & Pid Control SystemDocumento1 paginaBasics of Servo Motor, It's Advantages and Disadvantages - Electrical - Industrial Automation, PLC Programming, Scada & Pid Control SystemDexter ChinembiriNessuna valutazione finora
- 70V - 60W Dmos Audio Amplifier With Mute/St-By: Multipower BCD TechnologyDocumento13 pagine70V - 60W Dmos Audio Amplifier With Mute/St-By: Multipower BCD TechnologyGokayAkayNessuna valutazione finora
- Black Blue Red Pink Green White Violet Orange Yellow Brown Sky Blue Light Green GrayDocumento25 pagineBlack Blue Red Pink Green White Violet Orange Yellow Brown Sky Blue Light Green GrayToua Yaj100% (1)
- Operation Manual: Advanced Guitar Effects ProcessorDocumento52 pagineOperation Manual: Advanced Guitar Effects ProcessorDenis MartiniNessuna valutazione finora
- High Voltage CoilsDocumento20 pagineHigh Voltage CoilsMarco SussuaranaNessuna valutazione finora
- GNV1792S DatasheetDocumento23 pagineGNV1792S DatasheetSuper ManNessuna valutazione finora
- Solar CarDocumento20 pagineSolar CarVaibhav Taware83% (6)
- Module 1Documento121 pagineModule 1Soniya KadamNessuna valutazione finora
- Applications of Antenna Arrays To Mobile Communications, Part I: Performance Improvement, Feasibility, and System ConsiderationsDocumento30 pagineApplications of Antenna Arrays To Mobile Communications, Part I: Performance Improvement, Feasibility, and System ConsiderationsMoumita MishraNessuna valutazione finora