Potrebbero piacerti anche
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- August 2015Documento96 pagineAugust 2015Cleaner MagazineNessuna valutazione finora
- Bank Statement SampleDocumento6 pagineBank Statement SampleRovern Keith Oro CuencaNessuna valutazione finora
- TT Class XII PDFDocumento96 pagineTT Class XII PDFUday Beer100% (2)
- Awais Inspector-PaintingDocumento6 pagineAwais Inspector-PaintingMohammed GaniNessuna valutazione finora
- Notice For AsssingmentDocumento21 pagineNotice For AsssingmentViraj HibareNessuna valutazione finora
- Circuitos Digitales III: #IncludeDocumento2 pagineCircuitos Digitales III: #IncludeCristiamNessuna valutazione finora
- Hierarchy of The Inchoate Crimes: Conspiracy Substantive CrimeDocumento18 pagineHierarchy of The Inchoate Crimes: Conspiracy Substantive CrimeEmely AlmonteNessuna valutazione finora
- Computer System Architecture: Pamantasan NG CabuyaoDocumento12 pagineComputer System Architecture: Pamantasan NG CabuyaoBien MedinaNessuna valutazione finora
- 7Documento101 pagine7Navindra JaggernauthNessuna valutazione finora
- Outage Analysis of Wireless CommunicationDocumento28 pagineOutage Analysis of Wireless CommunicationTarunav SahaNessuna valutazione finora
- Modulation and Frequency Synthesis X Digital Wireless RadioDocumento233 pagineModulation and Frequency Synthesis X Digital Wireless Radiolcnblzr3877Nessuna valutazione finora
- Projects: Term ProjectDocumento2 pagineProjects: Term ProjectCoursePinNessuna valutazione finora
- Concrete For Water StructureDocumento22 pagineConcrete For Water StructureIntan MadiaaNessuna valutazione finora
- Exoskeleton ArmDocumento5 pagineExoskeleton Armc214ocNessuna valutazione finora
- Microeconomics: Production, Cost Minimisation, Profit MaximisationDocumento19 pagineMicroeconomics: Production, Cost Minimisation, Profit Maximisationhishamsauk50% (2)
- Kicks: This Brochure Reflects The Product Information For The 2020 Kicks. 2021 Kicks Brochure Coming SoonDocumento8 pagineKicks: This Brochure Reflects The Product Information For The 2020 Kicks. 2021 Kicks Brochure Coming SoonYudyChenNessuna valutazione finora
- Residential BuildingDocumento5 pagineResidential Buildingkamaldeep singhNessuna valutazione finora
- Fr-E700 Instruction Manual (Basic)Documento155 pagineFr-E700 Instruction Manual (Basic)DeTiEnamoradoNessuna valutazione finora
- EE1000 DC Networks Problem SetDocumento7 pagineEE1000 DC Networks Problem SetAmit DipankarNessuna valutazione finora
- Rehabilitation and Retrofitting of Structurs Question PapersDocumento4 pagineRehabilitation and Retrofitting of Structurs Question PapersYaswanthGorantlaNessuna valutazione finora
- Introduction Into Post Go-Live SizingsDocumento26 pagineIntroduction Into Post Go-Live SizingsCiao BentosoNessuna valutazione finora
- NIELIT Scientist B' Recruitment 2016 - Computer Science - GeeksforGeeksDocumento15 pagineNIELIT Scientist B' Recruitment 2016 - Computer Science - GeeksforGeeksChristopher HerringNessuna valutazione finora
- Bea Form 7 - Natg6 PMDocumento2 pagineBea Form 7 - Natg6 PMgoeb72100% (1)
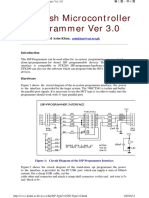
- ISP Flash Microcontroller Programmer Ver 3.0: M Asim KhanDocumento4 pagineISP Flash Microcontroller Programmer Ver 3.0: M Asim KhanSrđan PavićNessuna valutazione finora
- Product Guide TrioDocumento32 pagineProduct Guide Triomarcosandia1974Nessuna valutazione finora
- QG To AIS 2017 PDFDocumento135 pagineQG To AIS 2017 PDFMangoStarr Aibelle VegasNessuna valutazione finora
- Interest Rates and Bond Valuation: All Rights ReservedDocumento22 pagineInterest Rates and Bond Valuation: All Rights ReservedAnonymous f7wV1lQKRNessuna valutazione finora
- E Nose IoTDocumento8 pagineE Nose IoTarun rajaNessuna valutazione finora
- Dr. Li Li Prof. Feng Wu Beijing Institute of TechnologyDocumento20 pagineDr. Li Li Prof. Feng Wu Beijing Institute of TechnologyNarasimman NarayananNessuna valutazione finora
- Quantity DiscountDocumento22 pagineQuantity Discountkevin royNessuna valutazione finora