Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
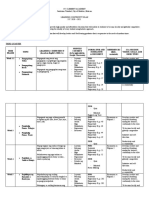
- Lesson Plan On Transport MechanismsDocumento5 pagineLesson Plan On Transport Mechanismsjecel taray100% (4)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Architecture As SpaceDocumento31 pagineArchitecture As Spaceazimkhtr50% (4)
- Remotivation Therapy (Sammm)Documento4 pagineRemotivation Therapy (Sammm)Sam Venezuelȧ100% (3)
- Case Study: Question 1)Documento2 pagineCase Study: Question 1)Hoai CoiNessuna valutazione finora
- Combat Patrol - GREY KNIGHTSDocumento6 pagineCombat Patrol - GREY KNIGHTSJan PolisiakNessuna valutazione finora
- Basic Rules For Steel ErectionDocumento71 pagineBasic Rules For Steel Erectionfoller2Nessuna valutazione finora
- FILIPINO 2 LEARNING PLAN 3rd QuarterDocumento4 pagineFILIPINO 2 LEARNING PLAN 3rd QuarterMary Kryss DG SangleNessuna valutazione finora
- Aim Efi Euro1 100 EngDocumento8 pagineAim Efi Euro1 100 EngManuel RodriguezNessuna valutazione finora
- AttentionDocumento26 pagineAttentionKarn KunteNessuna valutazione finora
- MaintGuideUSA PDFDocumento118 pagineMaintGuideUSA PDFfotopredicNessuna valutazione finora
- Youth Protection WaiverDocumento1 paginaYouth Protection WaiverKatie McCarthyNessuna valutazione finora
- Single and Multistage Steam Jet Ejectors: TorinoDocumento12 pagineSingle and Multistage Steam Jet Ejectors: TorinoSuman SenapatiNessuna valutazione finora
- Quantum Physics Exam Questions 69 QuestionsDocumento145 pagineQuantum Physics Exam Questions 69 QuestionsVedant BhardwajNessuna valutazione finora
- A Minor Project Report On ECOKART Student Racing Vehicle 2020 (ARPIT JAMES - 40215611116) (Mail2arpit2010@Gmail - Com)Documento59 pagineA Minor Project Report On ECOKART Student Racing Vehicle 2020 (ARPIT JAMES - 40215611116) (Mail2arpit2010@Gmail - Com)شاہد بشیرNessuna valutazione finora
- Holy QURAN - Unicode Font EditionDocumento462 pagineHoly QURAN - Unicode Font Editionalqudsulana8971% (7)
- Homework3 Yasser El Mehdi DIBDocumento1 paginaHomework3 Yasser El Mehdi DIBYasser DibNessuna valutazione finora
- 2000 - VAICTM-an Accounting Tool For IC Management - Ante PulicDocumento13 pagine2000 - VAICTM-an Accounting Tool For IC Management - Ante PulicIklima RahmaNessuna valutazione finora
- Methods of Determining Thermal Efficiency in Spray Drying ProcessDocumento3 pagineMethods of Determining Thermal Efficiency in Spray Drying ProcessDfunz WilphenNessuna valutazione finora
- DR Draw Users Guide 0384Documento224 pagineDR Draw Users Guide 0384gottes villainNessuna valutazione finora
- Commercial InvoiceDocumento4 pagineCommercial InvoiceHenry SilvaNessuna valutazione finora
- Mirpur University of Science and Technology (Must), Mirpur Deparment Computer Science Information TechnologyDocumento19 pagineMirpur University of Science and Technology (Must), Mirpur Deparment Computer Science Information TechnologySeharNessuna valutazione finora
- Lecture 06 - Types of Permanent Mold Casting ProcessesDocumento26 pagineLecture 06 - Types of Permanent Mold Casting ProcessesThe NoobNessuna valutazione finora
- Users of Accounting InformationDocumento4 pagineUsers of Accounting InformationfharnizaparasanNessuna valutazione finora
- F Series Flexible Elastic Resin InstructionDocumento5 pagineF Series Flexible Elastic Resin InstructionChristian EnglandNessuna valutazione finora
- 2012 Nike Football Clinic 4Documento2 pagine2012 Nike Football Clinic 4Bruno ChuNessuna valutazione finora
- Agesitab OP850: Electronic Operating TableDocumento4 pagineAgesitab OP850: Electronic Operating TableMuhammad NaomanNessuna valutazione finora
- Av1 OnDocumento7 pagineAv1 OnLê Hà Thanh TrúcNessuna valutazione finora
- Invariant and MonovariantDocumento3 pagineInvariant and MonovariantQuốc ĐạtNessuna valutazione finora
- 13-25-551 - 08 - 120121 Compresor Gardern DenverDocumento102 pagine13-25-551 - 08 - 120121 Compresor Gardern DenverArleyTrujillo1224Nessuna valutazione finora
- WJ 3 Inch Lift InstallDocumento3 pagineWJ 3 Inch Lift InstallGuilleNessuna valutazione finora