Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Vibraciones Mecanicas
Caricato da
Jesús Seiler VelasquezCopyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Vibraciones Mecanicas
Caricato da
Jesús Seiler VelasquezCopyright:
Formati disponibili
1
REPBLICA BOLIVARIANA DE VENEZUELA.
UNIVERSIDAD DEL ZULIA.
NUCLEO COSTA ORIENTAL DEL LAGO.
PROGRAMA DE INGENIERIA
CTEDRA: DINAMICA
VIBRACIONES MECANICAS Y DINAMICA DE SISTEMAS DEFORMABLES
Bachilleres:
Dicnorimar Cedeo CI: 21.211.003
Edmundo Estrada CI: 23.514.813
Herling Azuaje CI: 21.211.261
Andrea Sez CI: 20.706.799
Diego Gil CI: 21.187.749
Profesor:
Ing. Jos Perozo
Cabimas, Noviembre de 2012
INDICE DE CONTENIDO
INTRODUCCIN
1. VIBRACIONES MECANICAS
1.1 Vibraciones libres no amortiguadas
1.2 Vibraciones libres con amortiguamiento viscoso
1.3 Vibraciones forzadas no amortiguadas
1.4 Vibraciones forzadas con amortiguamiento viscoso
2. DINAMICA DE SISTEMAS DEFORMABLES
2.1 Corriente estacionaria de partculas
2.2 Aplicacin del principio del movimiento estacionario
2.3 Sistemas que ganan o pierden masa
CONCLUSIONES
NDICE DE REFERENCIAS
BIBLIOGRAFIA
INTRODUCCION
Las vibraciones mecnicas se refieren a la oscilacin de un cuerpo o un
sistema mecnico alrededor de su posicin de equilibrio. Algunas vibraciones son
deseables, como por ejemplo el movimiento pendular que controla el movimiento
de un reloj, o la vibracin de una cuerda de un instrumento musical. En cambio en
muchas aplicaciones mecnicas no se desea la presencia de las vibraciones. As
por ejemplo la vibracin excesiva de mquinas y estructuras puede ocasionar que
se aflojen las uniones y las conexiones llegando en algunos casos a producir el
colapso de la estructura.
El estudio de las vibraciones es muy amplio de tal manera que existe un
conjunto de publicaciones e investigaciones destinados al tema. Nuestra intencin
en este trabajo es presentar los principios bsicos de las vibraciones que deben
ser entendidos por los alumnos de ciencias e ingeniera y que sirven de base para
el estudio de otros cursos de su especialidad.
Vibraciones Mecnicas
1.1 Vibracin Libre No Amortiguada.
El movimiento vibratorio o vibracin es la variacin o cambio de
configuracin de un sistema en relacin al tiempo, en torno a una posicin de
equilibrio estable, su caracterstica fundamental es que es peridico, siendo
frecuente el movimiento armnico simple, por lo que este movimiento adquiere
una singular importancia en los estudios vibratorios.
El modelo ms simple y probablemente uno de los ms importantes en el
estudio de las vibraciones mecnicas es el de un sistema vibratorio de un grado
de libertad sujeto a vibracin libre no amortiguada.
El sistema est formado por una masa y un resorte, la masa permite
almacenar energa potencial y energa cintica mientras que el resorte permite
almacenar energa potencial debida a la deformacin del resorte, la vibracin libre
de este sistema vibratorio puede interpretarse como el resultado del intercambio
de la energa entre estos dos elementos.
Las suposiciones de este modelo son:
La masa del sistema es constante y totalmente rgida, se denomina M.
El resorte es lineal y de masa despreciable, por lo tanto es posible describir
el resorte mediante una nica constante, denominada la constante del
resorte, k. De manera que la relacin entre la fuerza y la deformacin del
resorte est dada por F = k , (1) donde F es la fuerza del resorte y es la
deformacin del resorte.
No hay amortiguamiento presente en el sistema.
El movimiento de la masa es translacin rectilnea.
Ecuacin del Movimiento Libre no Amortiguado
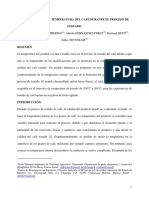
La fig. 1 Muestra este modelo un sistema de masa m y una constante elstica
k vamos a realizar un estudio esttico y cintico con el fin de determinar la
ecuacin diferencial que determinara el movimiento posteriormente veremos la
solucin de la ecuacin diferencial para ver la respuesta en el tiempo del sistema
as como la frmula que determina el clculo de la frecuencia natural.
Fig. 1 modelo tpico de un sistema libre no amortiguado.
Supongamos tres casos como se muestra en la figura 1.1
En la figura 1.1 (a) se tiene el resorte sin deformar, posteriormente se
coloca una masa m y el resorte sufre una deformacin Xs que llamaremos
deformacin esttica; de aqu la ecuacin
Fig. 1.2 diagrama de cuerpo libre, anlisis esttico.
El diagrama de cuerpo libre esttico nos rebela que
(ec.1)
Ahora imaginemos que estiramos la masa una distancia X y luego lo
soltamos y aqu comenzamos hacer el anlisis.
La figura 1.3 nos muestra el diagrama de cuerpo libre como consideramos
X + 1 por lo tanto x y x sern positivos hacia abajo.
Utilizando la 2da ley de Newton
(ec.2)
Como
la ecuacin 2 se convierte en:
(ec.3)
Utilizando la ecuacin 1 como en la ecuacin 3 aparecen como constantes
se pueden eliminar, por lo tanto:
(ec.4)
A la ecuacin 4 se le conoce como la ecuacin diferencial del movimiento
de un sistema libre no amortiguado.
1.2 Vibraciones Libres con Amortiguamiento viscoso
En todos los movimientos oscilantes reales, se disipa energa mecnica
debido a algn tipo de friccin o rozamiento, de forma que dejado libremente a s
mismo, un muelle o pndulo finalmente deja de oscilar. Este movimiento se
denomina amortiguado y se caracteriza porque tanto la amplitud como la energa
mecnica disminuyen con el tiempo.
La ecuacin diferencial que describe el movimiento es:
La ecuacin caracterstica es
, cuyas races son:
(
Se presentan tres casos posibles:
.- Amortiguamiento supercrtico:
Las races r1 y r2 son reales y distintas. La solucin de esta ecuacin,
amortiguada pero no armnica, es de la forma:
Donde C1 y C2 son las constantes de integracin. El sistema no oscila,
simplemente
vuelve
la
posicin
de
equilibrio,
cuanto
mayor
es
el
amortiguamiento, ms tiempo tarda el sistema en alcanzar la posicin de
equilibrio.
Amortiguamiento crtico:
La raz de la ecuacin caracterstica es doble e igual a
La solucin, amortiguada pero no armnica, es de la forma:
El sistema vuelve a la posicin de equilibrio en el tiempo ms breve posible
sin oscilacin. El amortiguamiento crtico tiene una importancia especial porque
separa los movimientos aperidicos (no oscilatorios) de los oscilatorios
amortiguados. Es decir, el valor crtico es la menor cantidad de amortiguamiento
para que el sistema no oscile. En muchas aplicaciones prcticas se utiliza un
amortiguamiento crtico, o prximo al crtico, para evitar vibraciones y conseguir
que el sistema alcance el equilibrio rpidamente.
Amortiguamiento subcrtico:
La frecuencia de la vibracin amortiguada es:
La solucin es de la forma:
Ejemplo 1
Un carrito que pesa 50 N est unido a tres resortes y rueda sobre un plano
inclinado como se ve en la figura 21-10. Las constantes de los resortes k1=k2=83
N/m y k3=25 N/m. Si se desplaza el carrito hacia arriba del plano inclinado una
distancia de 75 mm a partir de una posicin de equilibrio y se suelta con una
velocidad inicial de 375 mm/s hacia la
parte superior del plano cuando t=0.
Determinar:
1. El perodo tn, la frecuencia fn y la
pulsacin wn de la vibracin resultante.
10
2. La posicin del carrito en funcin del tiempo.
3. La amplitud A de la vibracin resultante.
Solucin:
1. En la figura 21-10b puede verse el diagrama de slido libre del carrito, en el
cual la coordenada x mide la posicin del mismo a lo largo del plano inclinado,
siendo x=0 para la posicin del equilibrio. En esta posicin (antes de haber
perturbado al carrito), las fuerzas de los resortes son proporcionales a sus
deformaciones. F1=k1 eq1 , F2=k2 eq2 y F3=k3
eq3 con lo que el equilibrio
da:
k1 eq1 + k2 eq2 - k3 eq3 mg sen15 = 0
Como no se sabe cunto se han alargado o comprimido los resortes antes de
unirlos al carrito, no es posible determinar los valores de las deformaciones
estticas
eq1,
eq2, eq3. No obstante, la ecuacin a da una relacin entre las
deformaciones estticas y el peso del carrito.
Cuando el carrito se encuentre en una posicin x arbitraria (positiva) estar
reducido el alargamiento de los resortes 1 y 2
(F1=k1 [ eq1 - x ] y F2=k2 [ eq2 x ])
y se habr aumentado el alargamiento del resorte 3 (F3=k3 [ eq3 + x ]). Por
tanto, la segunda ley de Newton
da:
k1 ( eq1 x) + k2 ( eq2 x) + k3 ( eq3 + x) mg sen15 = mx
(k1 eq1 + k2 eq2 - k3 eq3 mg sen 15) (k1 + k2 - k3 ) x = mx
Ahora bien, la cantidad entre parntesis primera es nula en virtud de la
ecuacin a, por lo que la ecuacin diferencial del movimiento se reduce a:
mx + (k1 + k2 - k3 ) x = 0
11
x + 81.62x = 0
Luego, la pulsacin propia, la frecuencia propia y el perodo son:
Wn =
Fn =
tn =
= 9.034 rad/s
= 1.438 Hz
= 0.695 s
2. El desplazamiento y la velocidad del carrito se pueden escribir en la forma:
X(t) = B cos 9.034t + C sen 9.034t
X(t) = -9.034B sen 9.034t + 9.034C cos 9.034t
Pero en t=0, x=B=75mm y x=9.034=375mm/s. Por tanto B=75mm y C=41.5mm y
ser:
X(t) = 75 cos 9.034t + 41.5 sen 9.034t
En la figura 21.10c se ha representado esta solucin.
12
De otra manera, la posicin y la velocidad del carrito se pueden escribir en
la forma:
X(t) = A cos (9.034 -
X(t) = 9.034 A sen (9.034t -
Y aplicando las condiciones iniciales X(0)= A cos
9.034(-sen
) = 375mm/s se tiene A=87.5mm y
= 75mm y x(0) = -
=28.96= 0.505rad. Por tanto,
la ecuacin que describe la posicin del carrito ser:
X(t) = 87.5 cos(9.034t 0.505) mm
El desplazamiento y la velocidad del carrito tambin podran escribirse en la
forma:
X(t) = A sen (9.034 -
X(t) = 9.034 A cos (9.034t -
En tal caso, aplicando las condiciones iniciales X(0)= A (-sen
x(0) = -9.034 cos
= 375mm/s se tiene A=87.5mm y
) = 75mm y
=-61.03= -1.065rad. Por
tanto, la ecuacin que describe la posicin del carrito ser:
X(t) = 87.5 sen(9.034t 1.065) mm
(La solucin descrita por estas dos ecuaciones es exactamente la misma que
se representa en la figura 21-10c. Las fases iniciales
=0.505 rad y
=-1.065
rad tambin se indican en la figura 21-10c.)
3. Como el valor mximo de la funcin coseno es 1, la amplitud de la vibracin
es:
A = 87.5 mm
Ejemplo B
Un bloque de 4 kg. de masa se mueve entre guas verticales suspendido
por dos muelles iguales de constante recuperadora elstica K1 = K2 = 50 N/m,
como se indica en la figura.
13
Calcular:
a) Ecuacin de las pequeas oscilaciones del sistema.
b) Periodo y frecuencia del movimiento resultante.
c) Velocidad y aceleracin mxima del bloque si la amplitud del movimiento
es a=60 mm.
Solucin:
a) Los muelles estn asociados en paralelo y oscilan con vibracin libre sin
amortiguamiento de acuerdo a la ecuacin:
a) La frecuencia natural y el periodo son:
b) La velocidad mxima del bloque para una amplitud de a=60 mm es:
14
Y la aceleracin mxima es:
1.3 Vibraciones Forzadas sin Amortiguamiento.
Para mantener un sistema oscilando es necesario suministrar energa al
sistema, cuando esto se lleva a cabo se dice que la vibracin es forzada. Si se
introduce energa en el sistema a un ritmo mayor del que se disipa, la energa
aumenta con el tiempo, lo que se manifiesta por un aumento de la amplitud del
movimiento. Si la energa se proporciona al mismo ritmo que se disipa, la amplitud
permanece constante con el tiempo.
La ecuacin diferencial del movimiento, teniendo en cuenta que la fuerza es
de tipo peridico, es:
Donde F0 es la amplitud y w la frecuencia de la fuerza excitadora.
La solucin general de la ecuacin diferencial se obtiene aadiendo a la
solucin general de la homognea una solucin particular de la completa:
(
15
La ecuacin caracterstica es mr 2 + k = 0, las races de esta ecuacin son
imaginarias
Conjugadas:
La solucin general de la homognea es:
(
As, la solucin general tiene por expresin:
1.4 Vibraciones Forzadas con amortiguamiento viscoso.
La ecuacin diferencial del movimiento, teniendo en cuenta que la fuerza es
de tipo peridico, F F t 0 senw, es de la forma:
mx''+cx'+kx+ =F
La ecuacin caracterstica correspondiente a la ecuacin diferencial
homognea es mr2 + cr + k = 0. Se supone amortiguamiento inferior al crtico para
que resulte una vibracin, la solucin general se obtiene aadiendo a la solucin
de la ecuacin diferencial de la homognea una solucin particular de la
completa (x = xh +xp)
Resultando:
16
Esta solucin consta de dos partes, una solucin transitoria, en la que el
primer trmino (xh), al cabo de un tiempo generalmente breve, se reduce a un
valor despreciable, y la solucin estacionaria ( xp), en la que el sistema oscila con
frecuencia w , amplitud A constante y desfase Q cuyas expresiones son:
Resolucin de la Ecuacin del Movimiento
En este caso consideramos que sobre la masa m acta una fuerza externa
(t), adems de las fuerzas internas antes descritas correspondientes al muelle y
al amortiguador.
17
Oscilador simple con amortiguamiento sometido a fuerza externa.
La ecuacin es ahora:
( )
Al incluir el termino independiente f(t) la ecuacin diferencial deja de ser
homognea. Esto da lugar a una estructura de la solucin distinta, como se ve a
continuacin
Integracin de la Ecuacin.
( )
( )
Restando trmino a trmino se obtiene:
(
18
Por tanto su diferencia, xh(t) = x2(t) - x1(t), es solucin de la ecuacin
homognea. Esto nos sirve para poder expresar la solucin general de la completa
como una solucin particular de la misma, que hallaremos por cualquier
procedimiento, ms la solucin general de la homognea que ya sabemos
calcular:
( )
( )
( )
Para el estudio de estos sistemas ser tomado como modelo el sistema
masa resorte con amortiguamiento mostrado en la siguiente figura al que se le
aplicar una fuerza externa excitadora. De esta forma la ecuacin que caracteriza
el comportamiento dinmico del sistema estar dada por una ecuacin diferencial
de segundo grado no homognea como sigue:
De donde se tiene que:
Donde,
Es el coeficiente de amortiguamiento del sistema con vibraciones forzadas.
El efecto del amortiguamiento provoca que la oscilacin propia del sistema
se anule despus de cierto perodo de tiempo quedando slo la accin de la
fuerza excitadora estable.
El trmino transitorio tendr un comportamiento caracterizado por la
relacin entre las fuerzas elsticas y las fuerzas amortiguadoras del sistema, como
ya es conocido.
La ecuacin anterior ser resuelta considerando las dos partes que la
integran. La parte homognea quedar igual a la ecuacin caracterstica de los
19
sistemas con oscilaciones libres amortiguadas y la solucin particular de la nohomognea establecer el trmino peridico.
La solucin de la ecuacin no homognea puede obtenerse suponiendo
que la respuesta del sistema y la fuerza excitadora tienen las siguientes
expresiones.
Sustituyendo las igualdades anteriores en la ecuacin inicial se obtiene el
siguiente resultado:
Despejando la amplitud de la ecuacin principal se tendr que:
Donde representa el ngulo de fase entre la respuesta del sistema y la
fuerza excitadora, e igual a:
As la solucin de la parte no homognea de la ecuacin diferencial
quedar expresada mediante la siguiente ecuacin:
20
Representacin en forma compleja del movimiento armnico forzado
Si se divide la respuesta del sistema respecto al trmino que representa a la
fuerza excitadora, la expresin que se obtiene corresponder a la de la funcin
respuesta del sistema en donde la fuerza excitadora es considerada unitaria. En
este caso la amplitud toma caractersticas de factor de ganancia o de
magnificacin.
Luego la solucin de la ecuacin del movimiento para los sistemas
amortiguados con vibracin forzada, dada por la ecuacin diferencial de segundo
orden no homogneo, ser igual a:
21
22
23
2. DINAMICA DE SISTEMAS DEFORMABLES
2.1 Corriente estacionaria de partculas
El conocimiento de las fuerzas que una corriente estacionaria de fluido ejerce
sobre las paletas de una turbina o de un ventilador es importante en el anlisis de
muchas maquinas. El anlisis completo de tal problema corresponde a un curso
de Mecnica de fluidos.
Consideremos el problema de hallar la fuerza que se ejerce sobre un codo
reductor de una tubera cuando lo atraviesa una corriente estacionaria de
partculas, como se indica en la figura 19-26. El fluido penetra en el codo con
cierta velocidad V1, cierta presin p1 y una densidad (masa por unidad de
volumen) p1 que se suponen constantes en toda en toda la seccin de admisin
de rea---. El fluido abandona luego el codo a una velocidad---. Presin--- y
densidad--- tambin constantes en toda la seccin de admisin de rea A1. Las
partculas abandonan luego el codo con una velocidad v2, presin p2 y densidad p2
tambin constantes en toda la seccin de salida del rea A 2. El flujo se supone
estacionario; es decir, en el interior del codo no se produce ningn aumento ni
disminucin del fluido. Por lo tanto, la masa de fluido que abandona el codo por
unidad de tiempo es igual a la que penetra en el por unidad de tiempo.
24
Se ha dibujado un volumen de control
que encierra una regin de fluido
limitada por la superficie sobre la cual se ejerce la fuerza que buscamos y
superficies sobre las cuales se ejercen fuerzas conocidas o que se pueden
determinar. Adems, las superficies que limitan el volumen de control se eligen de
manera que el flujo de fluido que las atraviese por unidad de tiempo sea o bien
nulo o bien conocido o fcil de determinar. El sistema de partculas encerradas en
el volumen de control constituye un sistema de masa variable, ya que
continuamente ganan partculas que penetran en el mientras pierde un nmero
igual de partculas que de l salen.
Para tener un sistema fijo de puntos materiales al cual sean aplicables los
teoremas mencionados, consideremos el sistema de partculas ampliado
representado en la figura 19-27a. Este sistema consta de partculas existentes en
el instante t en el volumen de control (cuya masa total es m1) ms las partculas
que penetraran en el volumen de control en un intervalo de tiempo
es
(cuya total
). Como todas las partculas que se hallen a una distancia de la seccin de
admisin no superior a
penetraran en el codo en el tiempo
de la regin adicional es
, el volumen
. Entonces, la masa total de este grupo de
partculas ampliado ser:
(19-24)
En el instante
, este mismo grupo de partculas ocupara la regin que se
indica en la figura 19-27b. Esta regin consta de las partculas existentes en el
volumen de control original en el instante
(cuya masa total es
que han salido del volumen de control durante el tiempo
) ms las
(cuya masa total es
). La masa del sistema fijo de partculas vendr ahora dada por
(19-25)
25
Ahora bien, por hiptesis de flujo estacionario la masa de las partculas en el
interior del volumen de control es siempre la misma; es decir,
. Por tanto,
combinando las ecuaciones 19-24 y 19-25 tendremos, en el lmite, cuando
(19-26)
que confirma lo antes dicho de que la masa de fluido que sale por unidad de
tiempo del codo es exactamente igual a la que penetra en el por unidad de tiempo.
Lo que verifica nuestra anterior aseveracin de que tanto fluido como sale del
codo penetra en el en el mismo tiempo.
La ecuacin 19-26 expresa el principio de conservacin de la masa. Los
trminos de la ecuacin representan la masa que circula por unidad de tiempo
, tanto penetrando como saliendo del volumen de control. En el sistema de
unidades SI se mide en kg/s. El el U.S. Customary system se expresa en
slug/s=lb.s/ft. En el caso de flujo de fluidos incomprensibles (fluidos en que la
densidad es constante) as como en otros flujos de densidad constante, en vez de
la masa que circula por unidad de tiempo se utiliza el caudal o volumen que circula
por unidad de tiempo
(19-26)
26
El caudal se mide en m3 en el sistema SI y en ft3 el U.S. Customary system. En
el instante t, el sistema fijo de partculas antes identificado tiene una cantidad de
movimiento
Donde (
), es la cantidad de movimiento de todas las partculas del volumen de
control en el instante t y
, el mismo sistema de partculas tendr una cantidad
de movimiento
Pero como el flujo es estacionario,
y la cantidad de movimiento
(ec. 19-26)
da en el lmite cuando
O sea:
(19-27)
Donde
es la suma de todas las fuerzas exteriores que se ejercen sobre el
sistema de partculas interiores al volumen de control.
27
En la ecuacin 19-27 es importante incluir todas las fuerzas exteriores que se
ejercen sobre el sistema de partculas interiores al volumen de control. Por tanto,
el trazar un diagrama de solido libre correcto es tan importante en estos problemas
de flujo de fluidos como en cualquier otro problema referente a un punto material o
a un cuerpo rigido. Por lo que respecta al diagrama de solido libre del volumen de
control (fig. 19-28).
Donde F, es la fuerza que ejerce el codo de la tubera sobre el fluido del
volumen de control (el fluido ejercer sobre el codo una fuerza igual o opuesta); W
es el peso del fluido del volumen de control;
son los vectores unitarios
normales hacia afuera de las secciones de reas
, respectivamente y
son las fuerzas que, sobre el fluido del volumen de control, ejercen
las porciones de fluidos contiguas.
Se puede obtener un resultado anlogo utilizando el teorema del momento
cintico. Tomando los momentos cinticos y los momentos de todas las fuerzas
exteriores respecto a un punto fijo O (o respecto al centro de masa G), tenemos
(19-28)
28
Donde
es la suma de los momentos de todas las fuerzas
exteriores que se ejercen sobre el fluido interior al volumen de control y
los vectores de posicin de los centros de las secciones
son
, respectivamente.
Los momentos cinticos y los momentos de todas las fuerzas deben calcularse
respecto a un mismo punto fijo O (respecto al centro de masa G)
Ejercicios.
1.- Medida del coeficiente de viscosidad. Una placa metlica cuya rea es igual a
0.15 m2 se conecta a una masa de 8.0 g por medio de una cuerda que pasa sobre
una polea ideal (cero masa y sin friccin), como en la figura. Un lubricante que
tiene un espesor de pelcula de 0.30 mm es colocado entre la placa y la superficie.
Cuando se suelta, la placa se mueve hacia la derecha con una velocidad
constante de 0.085 m/s. Encuentre el coeficiente de viscosidad del lubricante.
29
Solucin:
Debido a que la placa se mueve con velocidad constante, su aceleracin es
cero. Se mueve hacia la derecha bajo la accin de la fuerza T ejercida por la
cuerda y por la fuerza de friccin f asociada al flujo viscoso. En este caso, la
tensin es igual en magnitud al peso suspendido; por lo tanto, f = T = mg = (8.0 X
10-3 kg) (9.80m/s2 ) = 7.8 X 10-2N
El lubricante en contacto con la superficie horizontal est en reposo, en tanto que
la capa en contacto con la placa se mueve a la velocidad de la placa. Suponiendo
que el gradiente de velocidad es uniforme, tenemos
2.- Un tinaco a una altura h = 32 m y de dimetro D = 3.0 m suministra agua a una
casa. Un tubo horizontal en su base tiene un dimetro d = 2.54 cm (1 pulgada).
Para atender las necesidades de la casa, el tubo ha de suministrar agua con una
rapidez R = 0.0025 m3/s (cerca de 2/3 de galn por segundo). a) Si el agua fluye
con la rapidez mxima, qu presin tendra el tubo horizontal? b) Un tubo ms
pequeo, de dimetro d' = 1.27 cm (0.5 in), abastece el tercer piso de la casa,
situado a 7.2 m sobre el nivel del suelo. Cules son la rapidez de flujo y la
30
presin del agua en este tubo? No tenga en cuenta la viscosidad del agua.
Solucin.
(a) Aplicamos la ecuacin de Bernoulli a lo largo de la lnea de corriente ABC
que se ve en la figura. En los puntos A y B, se tiene que
En A la presin pA = p0, la presin atmosfrica. Para la presin en B se obtiene
Por otro lado, considerando que el flujo es constante, se tiene que vAAA = vBAB =
Flujo. Considerando el valor del flujo ( = 0.0025 m3/s) y las reas en cada punto,
las velocidades en cada punto son
31
Ntese que el trmino 2A1v2 en la expresin de pB es muy pequeo comparado
con el trmino 2B1v2 ;. En otras palabras, la rapidez del flujo en la parte superior
del tanque es muy pequea, debido a su enorme superficie transversal. Ahora se
obtiene para la presin en el punto B
Si el agua en el tubo horizontal no fluyera (es decir, si la vlvula estuviera
cerrada), la presin esttica en B incluira slo los dos primeros trminos, lo cual
es igual a 4.15 x 105 Pa. La presin cuando el agua fluye se reduce de este valor
esttico en la cantidad correspondiente a la presin dinmica. (b) Si se quiere que
el tubo ms estrecho que conduce al tercer piso tenga la misma rapidez de flujo, la
velocidad en C deber ser
es decir, cuatro veces el valor en B. Por otro lado, aplicando la ecuacin de
Bernoulli entre los puntos A y C se obtiene
32
Dada la mayor velocidad de flujo a travs del tubo ms pequeo, la contribucin
dinmica a la presin es mucho ms grande en C que en B. Los efectos estticos
y dinmicos tienden a aminorar la presin en este lugar en relacin con B.
2.2 Aplicacin del principio del movimiento estacionario
Teorema de Bernouilli: Sea un fluido ideal (estacionario, incompresible y no
viscoso). Vamos a obtener una relacin, consecuencia del principio del
conservacin de la energa. Sea el tubo de corriente de la figura. Consideremos el
movimiento de la porcin sombreada de fluido desde la situacin (1), hasta la
situacin (2).
El principio de conservacin de la energa cintica dice que:
33
Las fuerzas que estn actuando sobre el sistema son:
Las fuerzas de presin F1=p1S1, y F2=p2S2. F1 es ejercida por el fluido
que est a la izquierda del elemento en S1, y F2 es ejercida por el fluido a la
derecha en S2.
Tambin actan las fuerzas de la gravedad.
A medida que el fluido se mueve la regin sombreada se eleva, sin variar su
volumen. El trabajo realizado por la fuerza de la gravedad es:
Siendo m la masa de la zona sombreada.
El trabajo realizado por las fuerzas de presin es:
El trabajo de F2 es negativo, por ser contraria al desplazamiento. El trabajo
neto vale:
34
Ecuacin de Bernouilli
Donde todo los trminos son energa por unidad de volumen.
Presin hidrosttica.
Presin debida a la altura o potencial
Presin dinmica o cintica
No se considera el trabajo de las fuerzas interiores debido a que es nulo, ya
que el fluido es incompresible, y las distancias intermoleculares no varan.
En conclusin: si todas las fuerzas que actan sobre un fluido
incompresible, estacionario y no viscoso, son conservativas, y seguimos el
movimiento de un pequeo elemento de volumen la energa total por unidad de
volumen no vara.
Fluidos reales (En rgimen laminar): Los fluidos reales presentan
viscosidad que es equivalente a decir que existen efectos cortantes entre las
distintas capas del fluido. como consecuencia aparecen fuerzas que se oponen al
movimiento relativo entre capas contiguas(fuerzas de viscosidad), con lo que se
disipa energa, y el fluido se calienta.
35
Debido a esas fuerzas viscosas las velocidades del fluido en una seccin
perpendicular a la corriente no son iguales, pues existe un rozamiento interno.
Como tratamos el problema? Sean dos capas de fluidos separadas un dl.
La capa de arriba, que se mueve con mayor velocidad, ejerce una fuerza
tangencial sobre la capa de abajo, que tiende a acelerarla. A su vez, la capa de
abajo ejerce una fuerza del mismo valor sobre la de arriba, que la frena.
Se demuestra experimentalmente que:
Como consecuencia de la existencia de fueras viscosas se produce una
perdida de energa mecnica, y por tanto de presin, cuando el fluido se mueve a
lo largo de una conduccin. Se puede ver fsicamente de la siguiente forma:
36
Supongamos que l depsito es tan grande que no le afecta el abrir la llave
K. Si la llave K est cerrada el lquido en 1, 2, 3 est a la misma altura. Al abrirla el
lquido empieza a fluir. La velocidad en A, B y C es la misma, por ser la seccin
constante, pero existe una perdida lineal de presin debido a la perdida de energa
sufrida en la conduccin, que aumenta linealmente con la distancia al depsito.
Vamos a determinar la perdida de carga (diferencia de presin) entre dos
puntos de una conduccin debido a la viscosidad.
Sea un elemento de fluido cilndrico de radio r y longitud l. Las fuerzas que actan
sobre el elemento en la direccin del movimiento son F1, debida a la presin en 1,
F2, debida a la presin en 2, y Fr, debida a la viscosidad.
Si existe un movimiento estacionario la fuerza neta es nula.
37
El signo negativo de la fuerza viscosa es debido a que la velocidad disminuye
cuando aumenta el radio.
El factor 2 rl es la superficie sobre la que acta la fuerza viscosa.
El dr es debido a que no son capas separadas un dl, sino cilindros concntricos
separados un dr.
Dicha frmula nos da la velocidad para una distancia cualquiera(r) respecto del eje
de una partcula del fluido en funcin del Radio del conducto, del coeficiente de
viscosidad, de la distancia entre los puntos y de la diferencia de presin entre
ambos. Si lo representramos no dara un perfil de velocidades parablico.
Sistemas que ganan o pierden masa
En muchos problemas de dinmica, en un volumen de control penetran (o salen)
partculas a razn constante durante cierto intervalo de tiempo. A continuacin se
analiza un tipo diferente de sistema variable de partculas, a saber un sistema que
gana masa al absorber continuamente partculas o que pierde masa al expulsar
partculas de manera continua.
38
Considere el sistema el sistema S que se muestra en la figura. Su masa,
igual a m en el instante t aumenta en m en el intervalo de tiempo t. Para aplicar
el principio de impulso y la cantidad de movimiento al anlisis de este sistema, se
debe considerar en el tiempo t al sistema S ms las partculas de masa m que
absorbe S durante el intervalo de tiempo t. La velocidad de S en el tiempo t se
denota mediante v, la velocidad de S en el tiempo t + t se denota mediante v +
v, y la velocidad absoluta de las partculas absorbidas se denota por medio de va.
Al aplicar el principio de impulso y la cantidad de movimiento, se escribe:
mv + (m)va + F = (m + m)(v + v)
Al resolver para la suma F t de los impulsos de las fuerzas externas que
actan sobre S (excluyendo las fuerzas ejercidas por las partculas que se
absorben), se tiene:
F t = mv + m(v - va) + (m)( v)
Al introducir la velocidad relativa u con respecto a S de las partculas que
absorben, se escribe u = va v y se anota, puesto que va v, que la velocidad
relativa u est dirigida hacia la izquierda. Si se ignora el ltimo trmino en la
ecuacin que es de segundo orden, se escribe,
F t = m v (m)u
Al dividir entre t y dejar que t tienda a cero, se tiene en el lmite,
F = m
Al reagrupar los trminos y recordar que
u
= a, donde a es la aceleracin del
sistema S, se escribe,
F +
u = ma
Que muestra que la accin sobre S de las partculas que se estn absorbiendo es
equivalente a un empuje
39
P=
que tiende a frenar el movimiento S, ya que la velocidad relativa u de las
partculas est dirigida hacia la izquierda. Si se usan unidades del SI,
se
expresa en kg/s, la velocidad relativa u en m/s y el empuje correspondiente en
newton.
Las ecuaciones que se obtienen se usan tambin para determinar el
movimiento de un sistema S que pierde masa. En este caso la tasa de cambio de
masa es negativa y la accin sobre S de las partculas que se estn expulsando
es equivalente a un empuje en la direccin de u, esto es, en la direccin opuesta
a aquellas en que las partculas se estn expulsando. Un cohete representa un
caso caracterstico de un sistema que pierde masa de manera continua.
40
CONCLUSIONES
Las dos componentes bsicas en toda vibracin son la masa y la fuerza
recuperadora. Esta ltima que con frecuencia es proporcionada por un mecanismo
elstico, tiende a regresar a la masa a su posicin de equilibrio cuando ella es
separada de dicha posicin y liberada. En forma general las vibraciones se
clasifican en vibraciones libres y vibraciones forzadas. Las primeras son
originadas y mantenidas por fuerzas elsticas o las gravitatorias y las segundas
son producidas por fuerzas peridicas aplicadas exteriormente.
Las vibraciones libres y forzadas se dividen a su vez en amortiguadas y sin
amortiguamiento. Cuando las fuerzas que se oponen a la fuerza recuperadora son
despreciables se dice que la vibracin es sin amortiguamiento. Cuando las fuerzas
como el rozamiento del tipo viscoso no es despreciable se denominan vibracin
con amortiguamiento
Es sabido que en todo sistema real est presente las fuerzas disipativas
como el rozamiento que tiende a extinguir la vibracin. Sin embargo, en muchos
sistemas la prdida de energa debido al rozamiento es tan pequea que a
menudo pueden ser despreciables resultando entonces una vibracin libre.
41
INDICE DE REFERENCIAS
E. Russel Johnston, Jr., William E. Clausen. Mecnica Vectorial para
Ingenieros Dinmica, 8va edicin.
http://books.google.co.ve/books?id=Vq3HdDHRsz8C&pg=PA382&dq=sistem
a+que+ganan+o+pierden+masa&hl=es&sa=X&ei=cCJ3UqjcC_LLsQTO9IDI
CQ&ved=0CC4Q6AEwAA#v=onepage&q=sistema%20que%20ganan%20o
%20pierden%20masa&f=false
William F. Riley Ingeniera mecnica: Dinmica. 5ta edicin
http://fisica2ficunasam.zonalibre.org/CAPITULO%20II%20VIBRACIONES%
20%20%20MECANICAS%2029%20de%20mayo%202008.pdf
Potrebbero piacerti anche
- Guia de Tiro Parabolico Eder Aileth Luis JeinerDocumento8 pagineGuia de Tiro Parabolico Eder Aileth Luis JeinerHarold CadenaNessuna valutazione finora
- Principios Básicos de La Resistencia de MaterialesDocumento36 paginePrincipios Básicos de La Resistencia de MaterialesWilmerRenz100% (2)
- Laboratorio #4, Comprensible - KW, LG, JC, SN, KCDocumento7 pagineLaboratorio #4, Comprensible - KW, LG, JC, SN, KCleydis gonzalezNessuna valutazione finora
- Mecanica CuanticaDocumento23 pagineMecanica CuanticaQaniitOow Rzk QkariitaaNessuna valutazione finora
- Ejercicios Resultos Unidad IIIDocumento70 pagineEjercicios Resultos Unidad IIICarlos Valdez VillaNessuna valutazione finora
- Primero BguDocumento12 paginePrimero BguaidaNessuna valutazione finora
- Tema 02 (Cinemática - Mru - Mruv)Documento2 pagineTema 02 (Cinemática - Mru - Mruv)CC LuisNessuna valutazione finora
- Practica 3 Electricidad AplicadaDocumento12 paginePractica 3 Electricidad AplicadaLuis Gerardo Arandia UribeNessuna valutazione finora
- Deformaciones en Elementos Estructurales A FlexiónDocumento12 pagineDeformaciones en Elementos Estructurales A Flexióngediaze100% (1)
- Guia 1 Fisica Decimo 2do TrimestreDocumento12 pagineGuia 1 Fisica Decimo 2do TrimestreOscarin SandovalNessuna valutazione finora
- 3-Magnetismo. ElectromagnetismoDocumento31 pagine3-Magnetismo. Electromagnetismomeempecinado100% (2)
- Aplicación de La Ecuación Diferencial de Bernoulli.Documento7 pagineAplicación de La Ecuación Diferencial de Bernoulli.Fallen KrakenNessuna valutazione finora
- El Ciclo de Carnot y El Teorema de ClausiusDocumento6 pagineEl Ciclo de Carnot y El Teorema de ClausiusAndrésAlfaroCerazoNessuna valutazione finora
- Proceso de Tostado de GranosDocumento8 pagineProceso de Tostado de GranosYefer Salazar ValdiviaNessuna valutazione finora
- Guia 2 ResueltaDocumento30 pagineGuia 2 ResueltaHazelNessuna valutazione finora
- Ejercicios Resueltos de Transferencia de CalorDocumento9 pagineEjercicios Resueltos de Transferencia de CalorLuis Miguel0% (1)
- Fuerza Sobre Un Elemento de CorrienteDocumento5 pagineFuerza Sobre Un Elemento de CorrienteNeco Jaque RodriguezNessuna valutazione finora
- Movimiento Circular Uniformemente Acelerado PDFDocumento4 pagineMovimiento Circular Uniformemente Acelerado PDFGuadalupe PérezNessuna valutazione finora
- Planeación Practica 10Documento8 paginePlaneación Practica 10Diego Fernando CuellarNessuna valutazione finora
- Apuntes FP2 Fuerzas y MovimientosDocumento8 pagineApuntes FP2 Fuerzas y MovimientosyopyopNessuna valutazione finora
- Diseño de Pavimentos AdoquinadoDocumento12 pagineDiseño de Pavimentos AdoquinadoGerard Regalado83% (6)
- Energia de Deformacion PDFDocumento33 pagineEnergia de Deformacion PDFdavid mendoza villanuevaNessuna valutazione finora
- Actividad de Temperaturas Extremas Formulación FinalDocumento11 pagineActividad de Temperaturas Extremas Formulación Finalcristina fortichNessuna valutazione finora
- Análisis de Vibración ManualDocumento50 pagineAnálisis de Vibración ManualAlfredo GodinezNessuna valutazione finora
- M R U CDocumento3 pagineM R U CLeonardo BonillaNessuna valutazione finora
- Fisica MecanicaDocumento382 pagineFisica MecanicaJuana VillamilNessuna valutazione finora
- Infografia 1 Principios GeneralesDocumento1 paginaInfografia 1 Principios GeneralesDelima ValenciaNessuna valutazione finora
- Taller 30Documento8 pagineTaller 30FAUSTO ESTALIN ULCO CORONessuna valutazione finora
- Fisica y Parque de DiversionesDocumento28 pagineFisica y Parque de DiversionesGerardo AlvaradoNessuna valutazione finora
- Ejercicios MaxwellDocumento5 pagineEjercicios MaxwellMAUTINO CHAVEZ ALBERTO ENZONessuna valutazione finora