Potrebbero piacerti anche
- Tomos4 Operating Manual PDFDocumento15 pagineTomos4 Operating Manual PDFEmir Jordamović100% (1)
- L190 #3624 VmeDocumento590 pagineL190 #3624 Vmethierrylindo100% (2)
- Barista XXDocumento49 pagineBarista XXStrugaru GheorgheNessuna valutazione finora
- HMT Training ReportDocumento43 pagineHMT Training ReportNajvan MuhammedNessuna valutazione finora
- UL - 508A Standard For Industrial Control Panels - Standards CatalogDocumento6 pagineUL - 508A Standard For Industrial Control Panels - Standards Catalogsanthosh67% (3)
- SK200-8 - Travel System (SHOP MANUAL) PDFDocumento64 pagineSK200-8 - Travel System (SHOP MANUAL) PDFGohan Jay100% (2)
- Final HMTDocumento45 pagineFinal HMTAnubhav SharmaNessuna valutazione finora
- Conveyor Rollers BrochureDocumento16 pagineConveyor Rollers BrochureIne Shintya DewiNessuna valutazione finora
- Three Axis Rotary PlatformDocumento6 pagineThree Axis Rotary PlatformSudhanwa KulkarniNessuna valutazione finora
- Fabric Conveyor Belts Installation and Maintenance Guide: Habasit - Solutions in MotionDocumento16 pagineFabric Conveyor Belts Installation and Maintenance Guide: Habasit - Solutions in MotionAbdul Kani Ahamed MNessuna valutazione finora
- Report of Industrial TrainingDocumento19 pagineReport of Industrial TrainingA. SNessuna valutazione finora
- Linea de Produccion SemiautomaticaDocumento9 pagineLinea de Produccion SemiautomaticaIvanhoe UrrNessuna valutazione finora
- OPTIS Engineering Corporate Profile PDFDocumento6 pagineOPTIS Engineering Corporate Profile PDFlavu6177Nessuna valutazione finora
- Hospital Equipments IndiaDocumento4 pagineHospital Equipments IndiaMk Scientific ProductsNessuna valutazione finora
- EG Roti MidtermDocumento10 pagineEG Roti MidtermNilutpal phukanNessuna valutazione finora
- PI (Kopteh)Documento1 paginaPI (Kopteh)pisgor elotoNessuna valutazione finora
- Krone Fortima Hay Baler Min PDFDocumento36 pagineKrone Fortima Hay Baler Min PDFJosimar Nascimento da CostaNessuna valutazione finora
- Sheet Metal Forming Simulation in IndustryDocumento8 pagineSheet Metal Forming Simulation in IndustrysscamdNessuna valutazione finora
- 11.machineries Required For A Bakery UnitDocumento8 pagine11.machineries Required For A Bakery UnitBharath JaganathanNessuna valutazione finora
- Thermoelectric RefrigerationDocumento30 pagineThermoelectric RefrigerationGideon Uchehara100% (2)
- Terumo Europe Cardiovascular Systems 2009 Terumo Europe Cardiovascular SystemsDocumento142 pagineTerumo Europe Cardiovascular Systems 2009 Terumo Europe Cardiovascular SystemsManigandan DhamodhiranNessuna valutazione finora
- Automatic Chapati Making Machine Rolling TypeDocumento5 pagineAutomatic Chapati Making Machine Rolling TypeSundara KrishnaNessuna valutazione finora
- 2nd UnitDocumento60 pagine2nd UnitPradeepvenugopalNessuna valutazione finora
- Cad Total Services - PresentationDocumento9 pagineCad Total Services - PresentationananthNessuna valutazione finora
- Itc Prospectus & Syllabus 2018Documento8 pagineItc Prospectus & Syllabus 2018Naresh LalwaniNessuna valutazione finora
- Tablet MachineDocumento3 pagineTablet MachineAnonymous yBhOAi5UH100% (1)
- Coffee Vending MachineDocumento3 pagineCoffee Vending MachineEduardo D. TanNessuna valutazione finora
- Mechanical Project TilesDocumento33 pagineMechanical Project TilesElakkiya Karthic0% (1)
- Turbine BladeDocumento27 pagineTurbine BladesrtanandNessuna valutazione finora
- EM RailgunDocumento2 pagineEM RailgunDivyanshu SinghNessuna valutazione finora
- Eng Services Presentation TemplateDocumento31 pagineEng Services Presentation TemplateSachin JadhavNessuna valutazione finora
- Chain ConveyorsDocumento4 pagineChain ConveyorsrakicNessuna valutazione finora
- Saint Gobain Furon Microe High Purity Fluid Handling Solutions CatalogDocumento32 pagineSaint Gobain Furon Microe High Purity Fluid Handling Solutions CatalogXavierNessuna valutazione finora
- Mechatronic DesignDocumento10 pagineMechatronic DesignMarlonNessuna valutazione finora
- VTPL ProfileDocumento15 pagineVTPL Profilesharad_kabra_1Nessuna valutazione finora
- Simatic st70 Complete English 2011 PDFDocumento1.340 pagineSimatic st70 Complete English 2011 PDFMichał GórnyNessuna valutazione finora
- Design and ManufacturingBhakriMaking Machine With Modified Mixing of Dough &modified Heating SystemDocumento5 pagineDesign and ManufacturingBhakriMaking Machine With Modified Mixing of Dough &modified Heating Systemsreedhara g pNessuna valutazione finora
- Design and Development of Telescopic Con PDFDocumento3 pagineDesign and Development of Telescopic Con PDFregi friyadaNessuna valutazione finora
- Copertina: Caffè EuropaDocumento57 pagineCopertina: Caffè EuropaesNessuna valutazione finora
- Avg. Market Capitalization of Listed Companies During Jul-Dec 2018Documento294 pagineAvg. Market Capitalization of Listed Companies During Jul-Dec 2018Krishna PrajapatNessuna valutazione finora
- Application of Chain Drive and It's Selection MethodDocumento21 pagineApplication of Chain Drive and It's Selection MethodYogesh BNessuna valutazione finora
- Presentation ON: Solar Panel Cleaning MachineDocumento6 paginePresentation ON: Solar Panel Cleaning MachinerassNessuna valutazione finora
- Machine Tool TechnologyDocumento4 pagineMachine Tool TechnologyAnonymous Gm9VGRmVoNessuna valutazione finora
- Fabrication LayoutDocumento21 pagineFabrication LayoutretechNessuna valutazione finora
- Y-Puratek Telescoping Belt ConveyorDocumento4 pagineY-Puratek Telescoping Belt ConveyorYousef AlipourNessuna valutazione finora
- Design Guide - Stepper Motor Linear Actuators 101Documento16 pagineDesign Guide - Stepper Motor Linear Actuators 101DerekNessuna valutazione finora
- Chapati Making MachineDocumento4 pagineChapati Making MachinejadigeetaNessuna valutazione finora
- Mechanical Measurements and Metrology: (Course Code:BME18ET2)Documento72 pagineMechanical Measurements and Metrology: (Course Code:BME18ET2)O20 0023 Chandrasekaran. S. [PT]100% (1)
- Peepl Automation Brochure PDFDocumento7 paginePeepl Automation Brochure PDFSbstyles Single sherNessuna valutazione finora
- Bakery ProductsDocumento7 pagineBakery ProductsBharath JaganathanNessuna valutazione finora
- 1 Crisp Projects: Erode Salem Madurai Trichy Kochi Bengaluru CoimbatoreDocumento20 pagine1 Crisp Projects: Erode Salem Madurai Trichy Kochi Bengaluru CoimbatoreKathir VelNessuna valutazione finora
- Automation and Robotics 2020Documento58 pagineAutomation and Robotics 2020Nitin rajputNessuna valutazione finora
- THK Lead Screw NutDocumento32 pagineTHK Lead Screw NutGanesh JadhavNessuna valutazione finora
- M Tech Industrial AutomationDocumento50 pagineM Tech Industrial AutomationSandra GilbertNessuna valutazione finora
- Mbeya University of Science and TechnologyDocumento37 pagineMbeya University of Science and TechnologySadikiel100% (1)
- 1FlywheelPowerMultiplicationGeneration-Rev2 1Documento13 pagine1FlywheelPowerMultiplicationGeneration-Rev2 1ashagrieNessuna valutazione finora
- Packaging Processing and Equipments - IPDocumento12 paginePackaging Processing and Equipments - IPAdrian SelgasNessuna valutazione finora
- SDT, Capsules, Liquid Filling, ACGDocumento18 pagineSDT, Capsules, Liquid Filling, ACGCH NarimaneNessuna valutazione finora
- Engineering Services FlyerDocumento1 paginaEngineering Services FlyerKiran SrinivasanNessuna valutazione finora
- Stepper Motor ApplicationDocumento25 pagineStepper Motor ApplicationShanmuga SundarNessuna valutazione finora
- Element of CNC MachinesDocumento63 pagineElement of CNC MachinesmahavircNessuna valutazione finora
- Sunsai Pharma Equipments Pvt. ltd-2Documento8 pagineSunsai Pharma Equipments Pvt. ltd-2Sunsai VasaiNessuna valutazione finora
- Titanium Impeller Welding MKTG RevBDocumento6 pagineTitanium Impeller Welding MKTG RevBKatie RamirezNessuna valutazione finora
- H2W Technologies BrochureDocumento32 pagineH2W Technologies BrochurenemzinhoNessuna valutazione finora
- NTN Shaft & Housing DesignDocumento3 pagineNTN Shaft & Housing DesignArun KiranNessuna valutazione finora
- AC Motor CatalogueDocumento24 pagineAC Motor CatalogueArun KiranNessuna valutazione finora
- Boston Gear - Gear SelectionDocumento2 pagineBoston Gear - Gear SelectionArun KiranNessuna valutazione finora
- Gear Module Formulae PDFDocumento1 paginaGear Module Formulae PDFArun Kiran100% (1)
- Piezoresistive Sensors - Principles, Materials, Fabrication and ApplicationsDocumento43 paginePiezoresistive Sensors - Principles, Materials, Fabrication and ApplicationsArun KiranNessuna valutazione finora
- Science of Sacred 2010Documento163 pagineScience of Sacred 2010rasgoulNessuna valutazione finora
- Characterization of Powder Flowability Using Measurement of Angle of ReposeDocumento4 pagineCharacterization of Powder Flowability Using Measurement of Angle of ReposeArun KiranNessuna valutazione finora
- Books: Bulk Solids Handling: Equipment Selection and OperationDocumento1 paginaBooks: Bulk Solids Handling: Equipment Selection and OperationArun KiranNessuna valutazione finora
- Bearing Knowledge For SALESDocumento34 pagineBearing Knowledge For SALESArun KiranNessuna valutazione finora
- High Pressure Ball Valves 150119Documento5 pagineHigh Pressure Ball Valves 150119Nilesh MistryNessuna valutazione finora
- Union Special 61400ABDocumento16 pagineUnion Special 61400ABJared TylerNessuna valutazione finora
- Wheel Bearings Cups and Cones: Faa-Pma Approved!Documento2 pagineWheel Bearings Cups and Cones: Faa-Pma Approved!Fernando CentenoNessuna valutazione finora
- MTX Tc400 PC en v2 0315 ReadersDocumento24 pagineMTX Tc400 PC en v2 0315 ReadersMARIO100% (1)
- BBC - Steam Turbine - 100 MWDocumento42 pagineBBC - Steam Turbine - 100 MWvenkata madhavNessuna valutazione finora
- Lawnboy 10313 Service ManualDocumento144 pagineLawnboy 10313 Service Manualianfer0% (1)
- Driving Simba S7 DDocumento2 pagineDriving Simba S7 DLuis Gustavo Espinoza QuilcaNessuna valutazione finora
- Design & Analysis of Camshaft: S.G.Thorat, Nitesh Dubey, Arvind Shinde, Pushkar Fulpagare, Manish SuryavanshiDocumento5 pagineDesign & Analysis of Camshaft: S.G.Thorat, Nitesh Dubey, Arvind Shinde, Pushkar Fulpagare, Manish SuryavanshibebiNessuna valutazione finora
- D-155 - 3 Cylinder Diesel Engine (01/75 - 12/85) 00 - Complete Machine 06-16 - Crankcase Side CoverDocumento5 pagineD-155 - 3 Cylinder Diesel Engine (01/75 - 12/85) 00 - Complete Machine 06-16 - Crankcase Side CoverMANUALESNessuna valutazione finora
- XQ80 and XQ100 Generator Set Electrical System With EMCP3: Back Panel of Emcp3 BoxDocumento2 pagineXQ80 and XQ100 Generator Set Electrical System With EMCP3: Back Panel of Emcp3 Boxtommy lanyonNessuna valutazione finora
- Project Report OngcDocumento59 pagineProject Report OngcDev JhaNessuna valutazione finora
- TransmisioDocumento34 pagineTransmisioWilliams ArayaNessuna valutazione finora
- BOP and XMasTreeDocumento1 paginaBOP and XMasTreeo_tostaNessuna valutazione finora
- Toyota Fortuner Relay LocationsDocumento20 pagineToyota Fortuner Relay LocationsmojbarNessuna valutazione finora
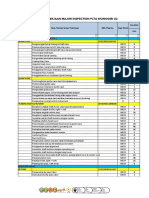
- RFQ JASA MAJOR INSPECTION PLTA WONOGIRI UNIT 2 - Untuk Penawaran Ke Vendor GeneratorDocumento6 pagineRFQ JASA MAJOR INSPECTION PLTA WONOGIRI UNIT 2 - Untuk Penawaran Ke Vendor GeneratorEliyanto E BudiartoNessuna valutazione finora
- Modutrol IV Motors Series 90Documento12 pagineModutrol IV Motors Series 90Antonio MancusoNessuna valutazione finora
- Esquema Conexion Ceza Blue (PH2)Documento2 pagineEsquema Conexion Ceza Blue (PH2)Wassim D-mNessuna valutazione finora
- DR200SEK5Documento114 pagineDR200SEK5fernandoNessuna valutazione finora
- TASK 71-00-00-811-821-A Low EPR - TGT Limited - TGT Goes To Maximum Limit Before Set EPR PDFDocumento2 pagineTASK 71-00-00-811-821-A Low EPR - TGT Limited - TGT Goes To Maximum Limit Before Set EPR PDFWidya DamayantiNessuna valutazione finora
- DB 01.02.02.19 Booster DLE 30 2Documento2 pagineDB 01.02.02.19 Booster DLE 30 2Pramod KumarNessuna valutazione finora
- DG型高压锅炉给水泵说明书 tài liệu kỹ thuật bơm cấpDocumento26 pagineDG型高压锅炉给水泵说明书 tài liệu kỹ thuật bơm cấpMạnh CườngNessuna valutazione finora
- Machinery and Machine Guarding ProgramDocumento35 pagineMachinery and Machine Guarding ProgramBenson Harison MajabeNessuna valutazione finora
- Manual Servicio WN 3503 PDFDocumento196 pagineManual Servicio WN 3503 PDFFranklin Marcelo Alcantara TrinidadNessuna valutazione finora
- Kosmek ToolDocumento16 pagineKosmek ToolKrishna Mohan T.RNessuna valutazione finora
- Know Your Cooling SystemDocumento103 pagineKnow Your Cooling SystemgustavoNessuna valutazione finora
- What Is Servo MotorDocumento2 pagineWhat Is Servo MotorMitul DhokaiNessuna valutazione finora