Potrebbero piacerti anche
- Secuencia DidácticaDocumento45 pagineSecuencia DidácticaJulieta Sánchez100% (1)
- Ejercicios de Simulink ModeladoDocumento33 pagineEjercicios de Simulink ModeladoAna Karen Gonzalez100% (1)
- Ejercicios Controladores PidDocumento71 pagineEjercicios Controladores PidJosue Tuz Poot100% (2)
- Informe de Controladores PIDDocumento20 pagineInforme de Controladores PIDfranco_3210_Nessuna valutazione finora
- Análisis y Diseño de Un Controlador Pid AnalógicoDocumento8 pagineAnálisis y Diseño de Un Controlador Pid AnalógicoWences LaoNessuna valutazione finora
- FUJIFILM Amulet - Innovality - Mamografo Digital Directo - GRIENSU S.A PDFDocumento27 pagineFUJIFILM Amulet - Innovality - Mamografo Digital Directo - GRIENSU S.A PDFMaría Nieves Avalos50% (2)
- Sugerencias Generales para El Diseño Del Controlador PIDDocumento35 pagineSugerencias Generales para El Diseño Del Controlador PIDgeoswaldNessuna valutazione finora
- Introduccion PIDDocumento8 pagineIntroduccion PIDjesusdruizvNessuna valutazione finora
- Tutorial PID EspanolDocumento8 pagineTutorial PID EspanolRamiro Cruz SimbaNessuna valutazione finora
- Efectos Del PidDocumento6 pagineEfectos Del PidRodrigo Zarate MartinezNessuna valutazione finora
- INFO - Control PIDDocumento19 pagineINFO - Control PIDMiguel Lara100% (1)
- CTM - PID TutorialDocumento8 pagineCTM - PID TutorialRaul GarciaNessuna valutazione finora
- Tutorial de Controladores PIDDocumento9 pagineTutorial de Controladores PIDmars1972Nessuna valutazione finora
- Análisis Dinámico de Un ControladorDocumento32 pagineAnálisis Dinámico de Un ControladorJuan Roldán Castillo100% (1)
- El Controlador PID BasicoDocumento9 pagineEl Controlador PID BasicoAlex Rodríguez VelardeNessuna valutazione finora
- Introduccion Al PIDDocumento7 pagineIntroduccion Al PIDGonzalo Roca VasquezNessuna valutazione finora
- El Controlador Pid BásicoDocumento12 pagineEl Controlador Pid Básicocesaryfaby22Nessuna valutazione finora
- Tarea 5 Speed MotorDocumento27 pagineTarea 5 Speed MotorSebastian GaviriaNessuna valutazione finora
- Control PidDocumento10 pagineControl Pidpiwy017Nessuna valutazione finora
- El Controlador PIDDocumento50 pagineEl Controlador PIDCristian F FigueroaNessuna valutazione finora
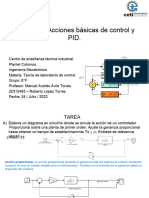
- TAREA 3.1 Acciones Básicas de Control y PIDDocumento20 pagineTAREA 3.1 Acciones Básicas de Control y PIDRoberto Lopez TorresNessuna valutazione finora
- Practica 3 Sistemas de Control 1Documento8 paginePractica 3 Sistemas de Control 1Rodolfo RamosNessuna valutazione finora
- CTM Ejemplo - Control PID Del Modelo Del Péndulo Invertido PDFDocumento8 pagineCTM Ejemplo - Control PID Del Modelo Del Péndulo Invertido PDFWilson Barco MNessuna valutazione finora
- Lab5 ControlDocumento31 pagineLab5 ControlNoéArguetaNessuna valutazione finora
- Me 5 PDFDocumento26 pagineMe 5 PDFedocampillayNessuna valutazione finora
- Ejercicios Controladores PidDocumento70 pagineEjercicios Controladores PidJulita Nelson GordonNessuna valutazione finora
- Universidad Miguel Hernández Automatización Industrial: Práctica 6: Programación Avanzada: Controlador PidDocumento15 pagineUniversidad Miguel Hernández Automatización Industrial: Práctica 6: Programación Avanzada: Controlador PidpedroNessuna valutazione finora
- Laboratorio Cuatro Control 2eeeeDocumento9 pagineLaboratorio Cuatro Control 2eeeeEmilio LovatonNessuna valutazione finora
- Control Proporcional Con MatlabDocumento10 pagineControl Proporcional Con MatlabmgrenteriaNessuna valutazione finora
- Taller Modelado Matlab PDFDocumento16 pagineTaller Modelado Matlab PDFJose BaqueroNessuna valutazione finora
- Practica 2 UIII Introduccion PI 2023Documento5 paginePractica 2 UIII Introduccion PI 2023Christian Jesús Hernández PérezNessuna valutazione finora
- CTM Ejemplo - Control PID de La Barra y BolaDocumento6 pagineCTM Ejemplo - Control PID de La Barra y BolaWilson Barco MNessuna valutazione finora
- Lab 6Documento6 pagineLab 6Oliver Gálvez ZavaletaNessuna valutazione finora
- CTM Ejemplo - Respuesta en Frecuencia - Control Del Péndulo Invertido PDFDocumento11 pagineCTM Ejemplo - Respuesta en Frecuencia - Control Del Péndulo Invertido PDFWilson Barco MNessuna valutazione finora
- Practica 5 Sintonía de Los ControladoresDocumento29 paginePractica 5 Sintonía de Los ControladoresJaneth ReyesNessuna valutazione finora
- Control Ejercicios de PidDocumento66 pagineControl Ejercicios de PidMundoPic MundoPicNessuna valutazione finora
- Proyecto PROTEUS LabVIEW MATLAB Programacion y Simulacion PDFDocumento15 pagineProyecto PROTEUS LabVIEW MATLAB Programacion y Simulacion PDFchimolo VanegasNessuna valutazione finora
- Pid 8Documento10 paginePid 8Marco DominguezNessuna valutazione finora
- Laboratorio de Control PidDocumento12 pagineLaboratorio de Control PidCarlos RamosNessuna valutazione finora
- Laboratorio 5Documento7 pagineLaboratorio 5hederNessuna valutazione finora
- Lab 7 Estrategias de Control Tieno MillerDocumento12 pagineLab 7 Estrategias de Control Tieno MillerMiller Tineo PerezNessuna valutazione finora
- Práctica 3 - Control PIDDocumento4 paginePráctica 3 - Control PIDsexolav979Nessuna valutazione finora
- Proyecto SCA-115Documento24 pagineProyecto SCA-115Miguel OlivaNessuna valutazione finora
- Reporte Proyectopdf20200205 25342 Apx0ty With Cover Page v2Documento22 pagineReporte Proyectopdf20200205 25342 Apx0ty With Cover Page v2Franco StieblerNessuna valutazione finora
- Practica 2 AB 2022-1Documento10 paginePractica 2 AB 2022-1Adrian Aaron Medrano VargasNessuna valutazione finora
- CeduvirtSimulink PDFDocumento33 pagineCeduvirtSimulink PDFArturo RawrNessuna valutazione finora
- PID SimulaciónDocumento14 paginePID Simulaciónjrse103001Nessuna valutazione finora
- Uso de SISOTOOL para Diseño de ControlesDocumento35 pagineUso de SISOTOOL para Diseño de ControlesFernando Uzategui GutierrezNessuna valutazione finora
- Acción DerivativaDocumento9 pagineAcción Derivativaaaron linkinNessuna valutazione finora
- FINAL 2 Sitema de Control 2 2.2Documento19 pagineFINAL 2 Sitema de Control 2 2.2David LiviasNessuna valutazione finora
- Controlador PIDDocumento5 pagineControlador PIDAlfredo TepanNessuna valutazione finora
- Controladores PIDDocumento10 pagineControladores PIDAlvaroA.DavilaNessuna valutazione finora
- Control PlantaDocumento10 pagineControl Plantaanyelo_08Nessuna valutazione finora
- Guía de Uso PID para Arduino 1 7Documento7 pagineGuía de Uso PID para Arduino 1 7JESSICA DANIELA BERNAL GOMEZNessuna valutazione finora
- Fase 4 JulianRsDocumento14 pagineFase 4 JulianRsJhon Edison Vargas CardonaNessuna valutazione finora
- PIDDocumento40 paginePIDAlexisVizueteNessuna valutazione finora
- 1 - Controlador Clasico de Tres Modos PIDDocumento40 pagine1 - Controlador Clasico de Tres Modos PIDfedegb2010Nessuna valutazione finora
- Practica No 4 Diseño ControladoresDocumento9 paginePractica No 4 Diseño ControladoresFaustoVinicioAcuñaCoelloNessuna valutazione finora
- Variante en El Algoritmo PidDocumento5 pagineVariante en El Algoritmo PidCarlos OliveiraNessuna valutazione finora
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDa EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaNessuna valutazione finora
- Compilador C CCS y Simulador Proteus para Microcontroladores PICDa EverandCompilador C CCS y Simulador Proteus para Microcontroladores PICValutazione: 2.5 su 5 stelle2.5/5 (5)
- Sistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208Da EverandSistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208Nessuna valutazione finora
- Capacitacion Cisco Ccna7Documento11 pagineCapacitacion Cisco Ccna7Jhon Jairo AnayaNessuna valutazione finora
- Ia2017 Clase1 Presentacion2Documento30 pagineIa2017 Clase1 Presentacion2Jhon Jairo AnayaNessuna valutazione finora
- Ruta de Formación Inteligencia Artificial Aplicada A La Robótica Móvil para Soluciones en El Agro (Ciclo Básico)Documento17 pagineRuta de Formación Inteligencia Artificial Aplicada A La Robótica Móvil para Soluciones en El Agro (Ciclo Básico)Jhon Jairo AnayaNessuna valutazione finora
- Automatización AvanzadaDocumento30 pagineAutomatización AvanzadaJhon Jairo AnayaNessuna valutazione finora
- Mantenimiento de Equipos Electrónicos de Consumo Masivo de Audio Y VideoDocumento24 pagineMantenimiento de Equipos Electrónicos de Consumo Masivo de Audio Y VideoJhon Jairo Anaya100% (2)
- Guia AP7Documento20 pagineGuia AP7Jhon Jairo AnayaNessuna valutazione finora
- P005-GFPI IngresoDocumento7 pagineP005-GFPI IngresoJhon Jairo AnayaNessuna valutazione finora
- P009-GFPI Alistamiento - Articulacion - SENA - Educacion - Media PDFDocumento2 pagineP009-GFPI Alistamiento - Articulacion - SENA - Educacion - Media PDFJhon Jairo AnayaNessuna valutazione finora
- P005-GFPI Ingreso PDFDocumento8 pagineP005-GFPI Ingreso PDFJhon Jairo AnayaNessuna valutazione finora
- Acuerdo TGE No. 008 Del 12 de Mayo de 2016 - Jurados de VotacionDocumento18 pagineAcuerdo TGE No. 008 Del 12 de Mayo de 2016 - Jurados de VotacionJhon Jairo AnayaNessuna valutazione finora
- Notificacion Resolucion 3128 de 2015Documento1 paginaNotificacion Resolucion 3128 de 2015Jhon Jairo AnayaNessuna valutazione finora
- Inclinometro Final Cap12Documento11 pagineInclinometro Final Cap12Anonymous jogLmb8Nessuna valutazione finora
- Primera Clase Curso de Introduccion CDocumento10 paginePrimera Clase Curso de Introduccion CtestarudodevNessuna valutazione finora
- Control de Impresión Desde Una RedDocumento10 pagineControl de Impresión Desde Una RedAriyair ZamarripaNessuna valutazione finora
- Ubicación de Instalaciones LogísticasDocumento10 pagineUbicación de Instalaciones LogísticasJOSE LUIS BANDERAS HERRERANessuna valutazione finora
- Tema 1 - Programación MultiprocesoDocumento30 pagineTema 1 - Programación MultiprocesodavttNessuna valutazione finora
- CHARLA 003-2019 Los Colores HablanDocumento2 pagineCHARLA 003-2019 Los Colores HablanCarlos López Acosta100% (1)
- TESIS Rev.5 1Documento21 pagineTESIS Rev.5 1jvsv11100% (1)
- Matriz Análisis de RiesgosDocumento62 pagineMatriz Análisis de RiesgosSlayer KingNessuna valutazione finora
- DEFINICIONnDEnUNnSISTEMAnDEnCONTROL1 88618c4f5db899fDocumento25 pagineDEFINICIONnDEnUNnSISTEMAnDEnCONTROL1 88618c4f5db899fJonathann M MarttinezNessuna valutazione finora
- RedesDocumento8 pagineRedesadtianNessuna valutazione finora
- Ipub U2 Ea MasrDocumento6 pagineIpub U2 Ea MasrMaiit SalazarNessuna valutazione finora
- Lider de BloqueoDocumento3 pagineLider de BloqueoDyalma PerezNessuna valutazione finora
- Traspaso TecnologicoDocumento5 pagineTraspaso TecnologicoiluminameNessuna valutazione finora
- Relación de Registros de La Administración General Del EstadoDocumento51 pagineRelación de Registros de La Administración General Del EstadohaldfordNessuna valutazione finora
- Topologia EstrellaDocumento3 pagineTopologia Estrella11-MH-HU-ELIZABETH LILY CALDERON CUADRADONessuna valutazione finora
- CriosDocumento23 pagineCriosFelix MontemayorNessuna valutazione finora
- Relacion 4Documento15 pagineRelacion 4Tomás Fernández CoronadoNessuna valutazione finora
- INFORME 2 Franklin M.Documento9 pagineINFORME 2 Franklin M.FranklinNessuna valutazione finora
- Escalon Unitario RetardadoDocumento3 pagineEscalon Unitario Retardadosteeven armasNessuna valutazione finora
- Universidad Nacional de San Antonio Abad Del Cusco: Trabajo Iv de Control 1Documento6 pagineUniversidad Nacional de San Antonio Abad Del Cusco: Trabajo Iv de Control 1Gabriela MoralesNessuna valutazione finora
- Integración de Equipos Active DirectoryDocumento3 pagineIntegración de Equipos Active DirectoryCorrales44Nessuna valutazione finora
- Clases Laterales-Algebra ModernaDocumento4 pagineClases Laterales-Algebra ModernaDaniel E. Taveras100% (1)
- Ejemplo 2 Taller de Integracion 1Documento21 pagineEjemplo 2 Taller de Integracion 1jcomartinezNessuna valutazione finora
- Autentificacion DHCP Con Radius Tamaño MinimoDocumento29 pagineAutentificacion DHCP Con Radius Tamaño MinimoPaul Fernando Pulla MerchanNessuna valutazione finora
- Free MindDocumento20 pagineFree MindMar LópezNessuna valutazione finora
- Enchiridion o Manual de EpictetoDocumento129 pagineEnchiridion o Manual de EpictetoRamiro RosónNessuna valutazione finora
- Nuevas Tics 03Documento216 pagineNuevas Tics 03joto6693828100% (2)
- Projects Technical English 3 SS2021.en - EsDocumento17 pagineProjects Technical English 3 SS2021.en - EsRúbbens SisNessuna valutazione finora