Potrebbero piacerti anche
- Lagrange Interpolation To Compute The Numerical Solutions of Differential, Integral and Integro-Differential EquationsDocumento10 pagineLagrange Interpolation To Compute The Numerical Solutions of Differential, Integral and Integro-Differential EquationsRashed2010100% (1)
- Numerical Solution of A Special Type of Integro-Differential EquationsDocumento16 pagineNumerical Solution of A Special Type of Integro-Differential EquationsRashed2010Nessuna valutazione finora
- Numerical Solutions of The Integral Equations of The First KindDocumento8 pagineNumerical Solutions of The Integral Equations of The First KindRashed2010100% (1)
- Content Courtesy of Springer Nature, Terms of Use Apply. Rights ReservedDocumento1 paginaContent Courtesy of Springer Nature, Terms of Use Apply. Rights ReservedTamal PramanickNessuna valutazione finora
- Fundamental Theories and Analytical Methods For Vibrations of Simply-Supported Beams Under Moving LoadsDocumento64 pagineFundamental Theories and Analytical Methods For Vibrations of Simply-Supported Beams Under Moving Loadsajsndas aksndaNessuna valutazione finora
- Comment On The Paper On Cattaneo Christov Heat Flux Model For C - 2017 - ResultDocumento2 pagineComment On The Paper On Cattaneo Christov Heat Flux Model For C - 2017 - ResultEduardo CandelaNessuna valutazione finora
- ����Documento3 pagine����AHKF -Nessuna valutazione finora
- A Result For The Coulomb Electrostatic Energy of A Unifor - 2017 - Results in PHDocumento2 pagineA Result For The Coulomb Electrostatic Energy of A Unifor - 2017 - Results in PHEduardo CandelaNessuna valutazione finora
- Fulltext PDFDocumento20 pagineFulltext PDFMuhammad FarooqNessuna valutazione finora
- Fulltext PDFDocumento10 pagineFulltext PDFMuhammad FarooqNessuna valutazione finora
- Global Solutions To Fractional Programming Problem PDFDocumento8 pagineGlobal Solutions To Fractional Programming Problem PDFLý Hải NamNessuna valutazione finora
- The Second Kind Chebyshev Quadrature Rules of Semi-Open Type and Its Numerical ImprovementDocumento12 pagineThe Second Kind Chebyshev Quadrature Rules of Semi-Open Type and Its Numerical ImprovementAminul JemailNessuna valutazione finora
- Chu Divded Difference 2008Documento13 pagineChu Divded Difference 2008saidbanachNessuna valutazione finora
- An Extension of The Finite Hankel Transform PDFDocumento6 pagineAn Extension of The Finite Hankel Transform PDFPrathamesh KulkarniNessuna valutazione finora
- An Extension of The Finite Hankel Transform PDFDocumento6 pagineAn Extension of The Finite Hankel Transform PDFPrathamesh KulkarniNessuna valutazione finora
- Physics Short NotesDocumento72 paginePhysics Short Notesmonujay8827Nessuna valutazione finora
- Solution of Two Point Boundary Value Problems Using Orthogonal Collocation On Finite ElementsDocumento13 pagineSolution of Two Point Boundary Value Problems Using Orthogonal Collocation On Finite ElementsJadiier AriistiizabalNessuna valutazione finora
- Relation Between Taylor and Fourier SeriesDocumento2 pagineRelation Between Taylor and Fourier SeriesKarlos VergaraNessuna valutazione finora
- 6.4.3. Torsional and Flexural-Torsional Buckling Under Thrust and End MomentsDocumento5 pagine6.4.3. Torsional and Flexural-Torsional Buckling Under Thrust and End MomentspraveennagarajanNessuna valutazione finora
- Content Courtesy of Springer Nature, Terms of Use Apply. Rights ReservedDocumento1 paginaContent Courtesy of Springer Nature, Terms of Use Apply. Rights ReservedTamal PramanickNessuna valutazione finora
- Content Courtesy of Springer Nature, Terms of Use Apply. Rights ReservedDocumento1 paginaContent Courtesy of Springer Nature, Terms of Use Apply. Rights ReservedTamal PramanickNessuna valutazione finora
- Global Errors For Approximate Approximations With Gaussian Kernels On Compact IntervalsDocumento10 pagineGlobal Errors For Approximate Approximations With Gaussian Kernels On Compact IntervalsYuanfei HuangNessuna valutazione finora
- Applied Mathematical Modelling, Volume 31, Issue 3, March 2007, Pages 490-498Documento9 pagineApplied Mathematical Modelling, Volume 31, Issue 3, March 2007, Pages 490-498Iwan M SyariefuddinNessuna valutazione finora
- Fulltext PDFDocumento10 pagineFulltext PDFMuhammad FarooqNessuna valutazione finora
- Commun Nonlinear Sci Numer Simulat: Erik Sweet, K. Vajravelu, Robert A. Van Gorder, I. PopDocumento8 pagineCommun Nonlinear Sci Numer Simulat: Erik Sweet, K. Vajravelu, Robert A. Van Gorder, I. PopSrinivas JangiliNessuna valutazione finora
- Ghosh-Samanta2021 Article RepreseNtatioNOfUNiformBouNdedDocumento23 pagineGhosh-Samanta2021 Article RepreseNtatioNOfUNiformBouNdedMuhammad ZeshanNessuna valutazione finora
- Use of Transformed Auxiliary Variable in Estimating The Finite Population MeanDocumento10 pagineUse of Transformed Auxiliary Variable in Estimating The Finite Population MeanGilang Al GhozaliNessuna valutazione finora
- Novo - VariationalDocumento12 pagineNovo - VariationalAdriano Sueke TakataNessuna valutazione finora
- Final Exam: ECH 5261 Advanced Transport Phenomena Fall 2020Documento4 pagineFinal Exam: ECH 5261 Advanced Transport Phenomena Fall 2020Darnell HouckNessuna valutazione finora
- Hessari's JournalDocumento8 pagineHessari's JournalPutriNessuna valutazione finora
- A Note On Variational Representation For Singular Values of MatrixDocumento5 pagineA Note On Variational Representation For Singular Values of MatrixNuno ValentinoNessuna valutazione finora
- The Calculation of Integrals Involving B-Splines by Means of Recursion RelationsDocumento10 pagineThe Calculation of Integrals Involving B-Splines by Means of Recursion RelationsHabib RahmanNessuna valutazione finora
- Sensitivity Evaluation in Seismic Reliability Analysis of StructuresDocumento10 pagineSensitivity Evaluation in Seismic Reliability Analysis of StructuresKamalesh BhowmikNessuna valutazione finora
- Naderi Matula 2018Documento6 pagineNaderi Matula 2018rapidNessuna valutazione finora
- Fluid Statics: Figure 2.1 Pressure Acting On An Infinitesimal ElementDocumento8 pagineFluid Statics: Figure 2.1 Pressure Acting On An Infinitesimal ElementJeiradNessuna valutazione finora
- Applied Mathematics and Computation: Guihua Zhao, Minghui Song, Zhanwen YangDocumento12 pagineApplied Mathematics and Computation: Guihua Zhao, Minghui Song, Zhanwen YangJese MadridNessuna valutazione finora
- Allegretto 2002Documento12 pagineAllegretto 2002Graphix GurujiNessuna valutazione finora
- Journal of Computational Physics: Sumesh P. Thampi, Santosh Ansumali, R. Adhikari, Sauro SucciDocumento7 pagineJournal of Computational Physics: Sumesh P. Thampi, Santosh Ansumali, R. Adhikari, Sauro SucciLi RexNessuna valutazione finora
- LithiumDocumento10 pagineLithiumHildayanti MustikasariNessuna valutazione finora
- Hopf Bifurcation in A Partial Dependent Predator-Prey System With Delay Q Huitao Zhao 2009Documento5 pagineHopf Bifurcation in A Partial Dependent Predator-Prey System With Delay Q Huitao Zhao 2009MeMu MeMuNessuna valutazione finora
- RLM 2010 021 004 03Documento8 pagineRLM 2010 021 004 03Luis FuentesNessuna valutazione finora
- 2021 Spring Nonlinear Techniques For Nonlinear Dispersive PDEs 1Documento11 pagine2021 Spring Nonlinear Techniques For Nonlinear Dispersive PDEs 1chejianglongNessuna valutazione finora
- Comment PDFDocumento2 pagineComment PDFSantiago Echeverri ArteagaNessuna valutazione finora
- Convergence of Gauss-Newtons Method and Uniqueness of The SolutionDocumento20 pagineConvergence of Gauss-Newtons Method and Uniqueness of The SolutionMárcioBarbozaNessuna valutazione finora
- Variograms and Structural AnalysisDocumento19 pagineVariograms and Structural AnalysisCristian MendozaNessuna valutazione finora
- Pertama SEQUENCES AND THEIR LIMITS BARTLEDocumento8 paginePertama SEQUENCES AND THEIR LIMITS BARTLEPutri SuryaniNessuna valutazione finora
- 1 s2.0 S037843710600358X MainDocumento6 pagine1 s2.0 S037843710600358X MainpovNessuna valutazione finora
- Complex Polynomials For The Computation of 2D Gravity AnomaliesDocumento10 pagineComplex Polynomials For The Computation of 2D Gravity AnomaliesAhmad ImamNessuna valutazione finora
- 4-2004-Some Observations in The Dynamics of Beams With Intermediate SupportsDocumento6 pagine4-2004-Some Observations in The Dynamics of Beams With Intermediate Supportsmortazavi.technicalNessuna valutazione finora
- Content Courtesy of Springer Nature, Terms of Use Apply. Rights ReservedDocumento1 paginaContent Courtesy of Springer Nature, Terms of Use Apply. Rights ReservedTamal PramanickNessuna valutazione finora
- Content Courtesy of Springer Nature, Terms of Use Apply. Rights ReservedDocumento1 paginaContent Courtesy of Springer Nature, Terms of Use Apply. Rights ReservedTamal PramanickNessuna valutazione finora
- Appendix A: Some Results in Quantum MechanicsDocumento8 pagineAppendix A: Some Results in Quantum MechanicsMalu LoNessuna valutazione finora
- 21 A-Classical-Perturbation-Technique-Which-Is-Valid-For-Large-Parameters PDFDocumento4 pagine21 A-Classical-Perturbation-Technique-Which-Is-Valid-For-Large-Parameters PDFAnonymous zXVPi2PlyNessuna valutazione finora
- Neet 2017 Paper SolutionsDocumento55 pagineNeet 2017 Paper Solutionsbibhas_samantaNessuna valutazione finora
- Problem40 53Documento1 paginaProblem40 53IENCSNessuna valutazione finora
- Lepik 2008 9Documento11 pagineLepik 2008 9Majeed AliNessuna valutazione finora
- 6.1 Antiderivatives and Slope Fields: N N + 1 KX KXDocumento4 pagine6.1 Antiderivatives and Slope Fields: N N + 1 KX KXeperlaNessuna valutazione finora
- Chapter-1, DFT and FFT, Z-TransformDocumento64 pagineChapter-1, DFT and FFT, Z-Transformwendye13Nessuna valutazione finora
- Numerical Analysis of High Speed Concrete Fragmentation Using A Meshfree Lagrangian MethodDocumento10 pagineNumerical Analysis of High Speed Concrete Fragmentation Using A Meshfree Lagrangian MethodBikash ThakurNessuna valutazione finora
- Catalog Produk Arduino Rajacell Ver10.4 - End - UserDocumento192 pagineCatalog Produk Arduino Rajacell Ver10.4 - End - UserSanto SetiawanNessuna valutazione finora
- Ranjit Kumar-Research Methodology A Step-by-Step G-15-16Documento2 pagineRanjit Kumar-Research Methodology A Step-by-Step G-15-16Trendy NewsNessuna valutazione finora
- REvision Test - 1Documento2 pagineREvision Test - 1JagendraNessuna valutazione finora
- Características Clínicas y Resultados de Los Pacientes Con COVID-19 Con Ventilación Invasiva en ArgentinaDocumento10 pagineCaracterísticas Clínicas y Resultados de Los Pacientes Con COVID-19 Con Ventilación Invasiva en ArgentinaSMIBA MedicinaNessuna valutazione finora
- CBSE NCERT Solutions For Class 9 Science Chapter 10: Back of Chapter QuestionsDocumento9 pagineCBSE NCERT Solutions For Class 9 Science Chapter 10: Back of Chapter QuestionsRTNessuna valutazione finora
- Kohler - Part Leveling MachinesDocumento12 pagineKohler - Part Leveling MachinesAli BÜLBÜLNessuna valutazione finora
- Air-Pollution-Meteorology UNIT IIDocumento91 pagineAir-Pollution-Meteorology UNIT IIDR. Ramesh ChandragiriNessuna valutazione finora
- 2020 Specimen Paper 1Documento16 pagine2020 Specimen Paper 1YuanWei SiowNessuna valutazione finora
- Math Ed 04: TrigonometryDocumento5 pagineMath Ed 04: TrigonometryCharles SilerioNessuna valutazione finora
- 01 - 6.2 Global Bike in SACDocumento34 pagine01 - 6.2 Global Bike in SACjroldan0313Nessuna valutazione finora
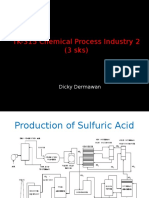
- TK-315 CPI2 - 1 - NonReacting SystemsDocumento34 pagineTK-315 CPI2 - 1 - NonReacting SystemsMuhammad IkbalNessuna valutazione finora
- 1) Semester II /1 / IV Exam 2020 (Even) (Old / New Syllabus) BacklogDocumento5 pagine1) Semester II /1 / IV Exam 2020 (Even) (Old / New Syllabus) BacklogHarsh VardhanNessuna valutazione finora
- Chapter 2 P2 Section ADocumento27 pagineChapter 2 P2 Section ANurul 'AinNessuna valutazione finora
- DSA Lab1Documento22 pagineDSA Lab1dukeyasser107967Nessuna valutazione finora
- Formulation and Evaluation of Probiotic Breadfriut (Artocarpus) BeverageDocumento16 pagineFormulation and Evaluation of Probiotic Breadfriut (Artocarpus) BeverageCBSUANessuna valutazione finora
- Comparative Analysis of Public and Private Educational Institutions: A Case Study of District Vehari-PakistanDocumento10 pagineComparative Analysis of Public and Private Educational Institutions: A Case Study of District Vehari-PakistannithyaNessuna valutazione finora
- Design Calculation of PavementDocumento4 pagineDesign Calculation of Pavementorode franklyn100% (1)
- FF7AN - Credit ManagementDocumento6 pagineFF7AN - Credit ManagementRoberta FernandesNessuna valutazione finora
- Ecs448 Chapter 5a ArchDocumento28 pagineEcs448 Chapter 5a Archdixn__Nessuna valutazione finora
- Tracking Field OperationsDocumento9 pagineTracking Field OperationsWilberZangaNessuna valutazione finora
- Circuit Diagrams P160110 Rev.0Documento24 pagineCircuit Diagrams P160110 Rev.0tuyetden613Nessuna valutazione finora
- Partial Derivative MCQs AssignementDocumento14 paginePartial Derivative MCQs AssignementMian ArhamNessuna valutazione finora
- Magnetic Resonant Coupling Based Wireless PowerDocumento7 pagineMagnetic Resonant Coupling Based Wireless PowerHartantoNessuna valutazione finora
- 42re TechDocumento7 pagine42re Techmontrosepatriot100% (2)
- Pfaff Hobbymatic 917 Sewing Machine Instruction ManualDocumento88 paginePfaff Hobbymatic 917 Sewing Machine Instruction ManualiliiexpugnansNessuna valutazione finora
- Mach 3 MillDocumento157 pagineMach 3 Millafricano333100% (1)
- SIMULATION of EMERGENCY ROOMS USING FLEXSIMDocumento10 pagineSIMULATION of EMERGENCY ROOMS USING FLEXSIMBrandon VarnadoreNessuna valutazione finora
- FFT Analysis of Poorly Organized NanoporesDocumento5 pagineFFT Analysis of Poorly Organized NanoporesJuly Gonzalez BonagasNessuna valutazione finora
- Rough Surfaces in ANSYSDocumento17 pagineRough Surfaces in ANSYSIgor BlanariNessuna valutazione finora
- Solar and Wind Hybrid Power GenerationDocumento35 pagineSolar and Wind Hybrid Power Generationlatest advance guruji 2018Nessuna valutazione finora