Potrebbero piacerti anche
- Desarrollo Formato 7.1 Registro de Activo Fijo-Detalle Del Inventario InicialDocumento9 pagineDesarrollo Formato 7.1 Registro de Activo Fijo-Detalle Del Inventario Inicialruth olivera urquizoNessuna valutazione finora
- Proyecto de Circuitos Digitales II Semaforo - PracticaDocumento6 pagineProyecto de Circuitos Digitales II Semaforo - PracticaFritz ACNessuna valutazione finora
- Puertos de Entrada y SalidaDocumento55 paginePuertos de Entrada y SalidaJuanfer PCNessuna valutazione finora
- Baron 58Documento33 pagineBaron 58joserufoperezarias100% (1)
- TALLER Configuracion Electronica 8Documento1 paginaTALLER Configuracion Electronica 8Julieth Santos67% (3)
- Flip Flop D AsincronoDocumento6 pagineFlip Flop D AsincronoAlexDiaz360 KILLNessuna valutazione finora
- 019-IT-VpVc-001 Informe Med Voltaje de Paso y Contacto PFV Luders Rev 0Documento7 pagine019-IT-VpVc-001 Informe Med Voltaje de Paso y Contacto PFV Luders Rev 0Angelo ZapataNessuna valutazione finora
- Fpga y PLD, VHDL y VerilogDocumento6 pagineFpga y PLD, VHDL y VerilogLuis PintadoNessuna valutazione finora
- Trabajo de Investigación PIC 16F886Documento11 pagineTrabajo de Investigación PIC 16F886Isaias RiveraNessuna valutazione finora
- 9S 75 Mercedes - 1308050189 - EsDocumento39 pagine9S 75 Mercedes - 1308050189 - Escampollano14100% (3)
- Set de Instrucciones Microcontrolador PICDocumento16 pagineSet de Instrucciones Microcontrolador PICCristian GasconNessuna valutazione finora
- Práctica 9Documento13 paginePráctica 9Rodrigo Varona GarciaNessuna valutazione finora
- Ventajas y Desventajas de Los Autos EléctricosDocumento4 pagineVentajas y Desventajas de Los Autos Eléctricosjalexito1Nessuna valutazione finora
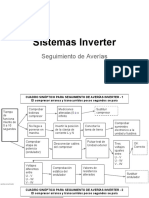
- Sistemas InverterDocumento9 pagineSistemas Inverterigor100% (2)
- Comunicación RS232Documento29 pagineComunicación RS232Carlos Niño Mendoza100% (1)
- Catalogo HoneywellDocumento145 pagineCatalogo HoneywellMarcelo AngelottiNessuna valutazione finora
- Distribución de Corriente en Barras de Cobre - Norma Din 43 671Documento4 pagineDistribución de Corriente en Barras de Cobre - Norma Din 43 671juan yenque100% (1)
- Unistrut: Configuraciones de Rieles AcanaladosDocumento3 pagineUnistrut: Configuraciones de Rieles AcanaladosOscar AlcasNessuna valutazione finora
- Tacómetro Con PIC16f84ADocumento16 pagineTacómetro Con PIC16f84ALuis ChicañaNessuna valutazione finora
- Ejemplos 16f84Documento23 pagineEjemplos 16f84Fidel Contreras SotoNessuna valutazione finora
- Reporte - Asdsadass Práctica 6Documento3 pagineReporte - Asdsadass Práctica 6Esteban Ramirez GuatsozonNessuna valutazione finora
- Manipulacion de Puertos en Lenguaje CDocumento12 pagineManipulacion de Puertos en Lenguaje CSalvador Soria SalgadoNessuna valutazione finora
- Contador Con PICDocumento18 pagineContador Con PICJulio RamírezNessuna valutazione finora
- Receptor de Señal IR Con PCDocumento10 pagineReceptor de Señal IR Con PCCarlos A. Galeano A.100% (1)
- NRC2097 - Chicaiza Salazar Palacios - Unidad - 3 - Informe Cronometro - VHDLDocumento16 pagineNRC2097 - Chicaiza Salazar Palacios - Unidad - 3 - Informe Cronometro - VHDLwilliamNessuna valutazione finora
- Pic Basic DisplayDocumento10 paginePic Basic DisplayManuel Eduardo Estrella PolancoNessuna valutazione finora
- Termómetro Con 16F877ADocumento9 pagineTermómetro Con 16F877ANelson S100% (1)
- Proyecto de Programables Control de TemperaturaDocumento49 pagineProyecto de Programables Control de TemperaturaCarlos ArriazaNessuna valutazione finora
- Multiplexor Con PIC16F877ADocumento7 pagineMultiplexor Con PIC16F877AJoel Caballero Zabaleta100% (1)
- Pic DimmerDocumento8 paginePic Dimmeranon-119611100% (4)
- Tutorial Asm Pic16f84 y Pic16f877aDocumento42 pagineTutorial Asm Pic16f84 y Pic16f877aAns Shel Cardenas YllanesNessuna valutazione finora
- Practica 3 Display LCD MicroprocesadoresDocumento10 paginePractica 3 Display LCD MicroprocesadoresEdward MedinaNessuna valutazione finora
- RECOPILACION DE TRABAJOS Semiconductores Diodos TransistoresDocumento38 pagineRECOPILACION DE TRABAJOS Semiconductores Diodos Transistoresnenelon100% (11)
- Temporizador 22 Pic 16f877aDocumento2 pagineTemporizador 22 Pic 16f877ajimmylomanoNessuna valutazione finora
- 3 Progra Del Microcontrolador en Ensamblador (3) (2792)Documento32 pagine3 Progra Del Microcontrolador en Ensamblador (3) (2792)Alfredo Pacheco ZapataNessuna valutazione finora
- Marcador de Baloncesto Con PicDocumento16 pagineMarcador de Baloncesto Con Piccorpses88Nessuna valutazione finora
- Curso de Programación de PIC en PICBasic ProDocumento21 pagineCurso de Programación de PIC en PICBasic ProCarlos ArangurenNessuna valutazione finora
- Labo 3Documento11 pagineLabo 3nicole vargas ponceNessuna valutazione finora
- PWM PIC 18f4550Documento3 paginePWM PIC 18f4550Camilo Rodriguez0% (1)
- Ejemplos de Pic 16f887Documento8 pagineEjemplos de Pic 16f887Carlos Harley CardosoNessuna valutazione finora
- Lectura de Teclado Con Pic 18f4550 AssemblerDocumento6 pagineLectura de Teclado Con Pic 18f4550 AssemblerDigby CastilloNessuna valutazione finora
- PIC16F877 Con MikroCDocumento161 paginePIC16F877 Con MikroCAre Granda100% (1)
- Lenguaje C Orientado A Microcontroladores Rev 1Documento42 pagineLenguaje C Orientado A Microcontroladores Rev 1David Shure XivNessuna valutazione finora
- Primera: ParteDocumento3 paginePrimera: ParteJuan Luis100% (1)
- Arquitectura de Computadoras Multiciclo 2015Documento56 pagineArquitectura de Computadoras Multiciclo 2015Bman100% (2)
- Laboratorio #3 Circuitos ElectrónicosDocumento6 pagineLaboratorio #3 Circuitos ElectrónicosMARIANessuna valutazione finora
- Sintaxis en VHDL - EjemplosDocumento22 pagineSintaxis en VHDL - EjemplosHenry Romero100% (1)
- Decodificador BCD A 7 Segmentos VHDLDocumento11 pagineDecodificador BCD A 7 Segmentos VHDLpaco_tun100% (1)
- Informe Final 4 - Ci 74ls194Documento8 pagineInforme Final 4 - Ci 74ls194edsonygisellaNessuna valutazione finora
- Generador de Ondas Cuadradas para ArduinoDocumento2 pagineGenerador de Ondas Cuadradas para ArduinoPierDonneeNessuna valutazione finora
- Atmega 32Documento261 pagineAtmega 32Marcelo QuispeNessuna valutazione finora
- Diseño de Circuitos Combinacionales en VHDLDocumento6 pagineDiseño de Circuitos Combinacionales en VHDLPablo PulacheNessuna valutazione finora
- Ejemplo Contador Del 0 Al 99Documento16 pagineEjemplo Contador Del 0 Al 99George MoreloNessuna valutazione finora
- Ejercicios Básicos para MicroconladoresDocumento8 pagineEjercicios Básicos para MicroconladoresestanizniloNessuna valutazione finora
- Generando Una Funcion de Onda DeseadaDocumento6 pagineGenerando Una Funcion de Onda DeseadaSteven Alexander Buritica MartinezNessuna valutazione finora
- Capacimetro Con Pic16f877aDocumento17 pagineCapacimetro Con Pic16f877aAns Shel Cardenas YllanesNessuna valutazione finora
- Codigo en VHDLDocumento6 pagineCodigo en VHDLGabriel Ch MendezNessuna valutazione finora
- Diseño Con Pic Cerradura ElectronicaDocumento10 pagineDiseño Con Pic Cerradura ElectronicaJuan David Barrera Granados100% (1)
- 5 - Comunicaciones Serial y Arduino - ArduinoDocumento26 pagine5 - Comunicaciones Serial y Arduino - ArduinoPaul ChiliquingaNessuna valutazione finora
- Procedimiento para La Transfrencia de MensajesDocumento16 pagineProcedimiento para La Transfrencia de MensajesMarisolNessuna valutazione finora
- Circuitos Digitales SecuencialesDocumento7 pagineCircuitos Digitales SecuencialesJose Martinez EstradaNessuna valutazione finora
- Inversores PWM IDocumento27 pagineInversores PWM IAlexander Castillo MaytaNessuna valutazione finora
- Reset Por Hardware en Un PicDocumento1 paginaReset Por Hardware en Un PicUfoLeds CncNessuna valutazione finora
- ADC - LCD (PIC18f4550)Documento3 pagineADC - LCD (PIC18f4550)Israel Mendoza VelázquezNessuna valutazione finora
- Tutorial Proton Ide TUTORIAL 07Documento8 pagineTutorial Proton Ide TUTORIAL 07Ernesto Diaz Ronceros100% (1)
- Reloj Digital Con PicDocumento9 pagineReloj Digital Con PicIvanmcxNessuna valutazione finora
- Solucionario de Controles ElectricosDocumento2 pagineSolucionario de Controles ElectricosauthorNessuna valutazione finora
- PWM Con Pic 16f628aDocumento9 paginePWM Con Pic 16f628aSalvador Ramirez PachecoNessuna valutazione finora
- Tutorial de ProteusDocumento3 pagineTutorial de ProteusbernardoNessuna valutazione finora
- Eduardo Daniel Columna MuñizDocumento14 pagineEduardo Daniel Columna Muñizjaneth grNessuna valutazione finora
- Flujo de PotenciaDocumento2 pagineFlujo de PotenciaLuisOrdayaNessuna valutazione finora
- EndoscopioDocumento1 paginaEndoscopiojalexito1Nessuna valutazione finora
- Catalogo BandejasDocumento21 pagineCatalogo BandejaspablodaniloNessuna valutazione finora
- Portacablese PDFDocumento28 paginePortacablese PDFAnibal RengifoNessuna valutazione finora
- Curvas MagnetotermicosDocumento40 pagineCurvas MagnetotermicosDaniel AvecillaNessuna valutazione finora
- FlujoDocumento7 pagineFlujojalexito1Nessuna valutazione finora
- Portacablese PDFDocumento28 paginePortacablese PDFAnibal RengifoNessuna valutazione finora
- Portacablese PDFDocumento28 paginePortacablese PDFAnibal RengifoNessuna valutazione finora
- BluetoohDocumento1 paginaBluetoohjalexito1Nessuna valutazione finora
- Codigos ANSIDocumento8 pagineCodigos ANSIjalexito1Nessuna valutazione finora
- Aisladores PDFDocumento17 pagineAisladores PDFJhon RicaldiNessuna valutazione finora
- TrifasicaDocumento28 pagineTrifasicaJose Victor Chircca GonzalesNessuna valutazione finora
- 2.1.3.8 Lab - Create A Simple Game With Python IDLEDocumento5 pagine2.1.3.8 Lab - Create A Simple Game With Python IDLEronaldportoNessuna valutazione finora
- Qué Es El Internet de Las CosasDocumento2 pagineQué Es El Internet de Las Cosasjalexito1Nessuna valutazione finora
- Generador de FuncionesDocumento2 pagineGenerador de Funcionesjalexito1100% (1)
- Redes IndustrialesDocumento2 pagineRedes Industrialesjalexito1Nessuna valutazione finora
- Tecnologia 5GDocumento3 pagineTecnologia 5Gjalexito1Nessuna valutazione finora
- LunaDocumento4 pagineLunajalexito1Nessuna valutazione finora
- Medicion de CaudalDocumento5 pagineMedicion de Caudaljalexito1Nessuna valutazione finora
- Agujero de GusanoDocumento2 pagineAgujero de Gusanojalexito1Nessuna valutazione finora
- Física NuclearDocumento1 paginaFísica Nuclearjalexito1Nessuna valutazione finora
- FMV Led - Reflectores EatonDocumento8 pagineFMV Led - Reflectores Eatonjalexito1Nessuna valutazione finora
- WEG - Motores de Induccion Alimentados Por VFD PWMDocumento36 pagineWEG - Motores de Induccion Alimentados Por VFD PWMvicbtoNessuna valutazione finora
- 56Documento3 pagine56umyangNessuna valutazione finora
- Fuente de PCDocumento4 pagineFuente de PCjalexito1Nessuna valutazione finora
- Agujero NegroDocumento4 pagineAgujero Negrojalexito1Nessuna valutazione finora
- Glosario de Cables ElectricosDocumento4 pagineGlosario de Cables Electricosjalexito1Nessuna valutazione finora
- Solucionario Principios de Análisis Instrumental - SkoogDocumento235 pagineSolucionario Principios de Análisis Instrumental - Skoogtaniamunoz1911Nessuna valutazione finora
- Tablero SEL-E-804 ITM ADocumento7 pagineTablero SEL-E-804 ITM AwintermacNessuna valutazione finora
- Arduino + Bluetooth - DIYMakersDocumento35 pagineArduino + Bluetooth - DIYMakersPAULO VILCHESNessuna valutazione finora
- Paper Curva de Rendimiento de Un TransformadorDocumento5 paginePaper Curva de Rendimiento de Un TransformadorSilverNessuna valutazione finora
- Plano-Planta de PiscinaDocumento1 paginaPlano-Planta de Piscinaarq steven RuizNessuna valutazione finora
- Historia de Las ComputadorasDocumento2 pagineHistoria de Las ComputadorasErandyNessuna valutazione finora
- Guia No 1 Electroquimica DesarrolladaDocumento6 pagineGuia No 1 Electroquimica DesarrolladaLuis MoralesNessuna valutazione finora
- Taller3 IE 2018 NuevoDocumento8 pagineTaller3 IE 2018 NuevoEddy Yohanna Martinez RoaNessuna valutazione finora
- Guia de Autoaprendizaje Visual FoxproDocumento113 pagineGuia de Autoaprendizaje Visual FoxproJonathan MarquezNessuna valutazione finora
- Agentes NucleantesDocumento4 pagineAgentes NucleantesR Daniela TorrealbaNessuna valutazione finora
- Proyecto Final SecuencialesDocumento9 pagineProyecto Final Secuencialespruebapruebaprueba03Nessuna valutazione finora
- El Entrenamiento en CircuitoDocumento12 pagineEl Entrenamiento en CircuitoAldo Flores LopezNessuna valutazione finora
- Monofásicos Padmounted Clase 6kV 15kV y 25kV TAP 2 PDFDocumento2 pagineMonofásicos Padmounted Clase 6kV 15kV y 25kV TAP 2 PDFRobert CeaNessuna valutazione finora
- Radioenlaces DigitalesDocumento3 pagineRadioenlaces DigitalesLA Flaka ZerpaNessuna valutazione finora
- Semana 3 - Átomo de Bohr-Números Cuánticos Configuración ElectrónicaDocumento24 pagineSemana 3 - Átomo de Bohr-Números Cuánticos Configuración ElectrónicaKenny SantaanaNessuna valutazione finora
- ARDU-5351 Manual SpanishDocumento12 pagineARDU-5351 Manual SpanishEmilio LozanoNessuna valutazione finora
- Specsheet Pararrayos PDFDocumento2 pagineSpecsheet Pararrayos PDFingguedezandresNessuna valutazione finora
- Simbologia en Equipos de MedicionDocumento13 pagineSimbologia en Equipos de Medicionjsyy2013Nessuna valutazione finora
- Ejercicios 7 I 2019 503Documento2 pagineEjercicios 7 I 2019 503Miguel Angel Lara Nisttahuz100% (1)
- Informe Final Lab 4 Potencia 2Documento2 pagineInforme Final Lab 4 Potencia 2Marco VelardeNessuna valutazione finora
- 2-2) Diseño de Un Robot Autonomo PDFDocumento68 pagine2-2) Diseño de Un Robot Autonomo PDFJorge Luis Vargas FloresNessuna valutazione finora
- Arrancador Suave PDFDocumento234 pagineArrancador Suave PDFDiego CordovaNessuna valutazione finora
- Plan de Estudios C-64: Programa de Ingeniería Electrónica - Universidad Del QuindíoDocumento1 paginaPlan de Estudios C-64: Programa de Ingeniería Electrónica - Universidad Del QuindíoJuan AguirreNessuna valutazione finora