Potrebbero piacerti anche
- Discrete Mathematics and Its Application - Chapter 2Documento62 pagineDiscrete Mathematics and Its Application - Chapter 2Funkey dunkeyNessuna valutazione finora
- 5 - Design of Short Braced Columns To BS8110Documento13 pagine5 - Design of Short Braced Columns To BS8110Ahmed Al-Amri100% (1)
- 12Documento68 pagine12Prayush RajbhandariNessuna valutazione finora
- Lateral Load Example PDFDocumento19 pagineLateral Load Example PDFSA023100% (1)
- Saint Anthony Montessori Educational Network, Inc.: "Quality Education Is The Foundation of Your Child's Bright Future."Documento2 pagineSaint Anthony Montessori Educational Network, Inc.: "Quality Education Is The Foundation of Your Child's Bright Future."Lea Grace Guleng100% (1)
- STR AnalysisDocumento136 pagineSTR AnalysisWeha Yu100% (1)
- Slope ND DeflectionDocumento19 pagineSlope ND DeflectionprashantbaraskarNessuna valutazione finora
- BC1 01SingleBoxDocumento41 pagineBC1 01SingleBoxDwi NugrohoNessuna valutazione finora
- 4.perhitungan BalokDocumento14 pagine4.perhitungan BalokSabrangNessuna valutazione finora
- Sadt HT 225a Manual Book For UserDocumento20 pagineSadt HT 225a Manual Book For UserWansa Pearl FoundationsNessuna valutazione finora
- Analisa DataDocumento39 pagineAnalisa DataUtomo YohanesNessuna valutazione finora
- Perencanaan Kuda-Kuda KayuDocumento23 paginePerencanaan Kuda-Kuda KayuArchi TksNessuna valutazione finora
- 6 Problemsgroup 2Documento8 pagine6 Problemsgroup 2Alhji AhmedNessuna valutazione finora
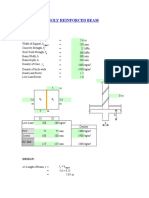
- Design of Singly Reinforced Beam: Input DataDocumento9 pagineDesign of Singly Reinforced Beam: Input DataMian M KhurramNessuna valutazione finora
- Concrete Lectures Slab.2 Direct Design Method - PPT ExamplesDocumento58 pagineConcrete Lectures Slab.2 Direct Design Method - PPT ExamplesUmer WaheedNessuna valutazione finora
- Section5 2Documento7 pagineSection5 2Ravi ShankarNessuna valutazione finora
- Stranalysis SD METHODDocumento78 pagineStranalysis SD METHODNaveen RevannaNessuna valutazione finora
- Slope Deflection MethodDocumento17 pagineSlope Deflection Methodmshahryar50% (2)
- Perhitungan TanggaDocumento6 paginePerhitungan TanggaMaz donoNessuna valutazione finora
- Diketahui:: Arah MemanjangDocumento14 pagineDiketahui:: Arah Memanjangskipy_nutNessuna valutazione finora
- Volume 3 Design 11115Documento57 pagineVolume 3 Design 11115abhijeet sahuNessuna valutazione finora
- Sway Concrete Column ExampleDocumento15 pagineSway Concrete Column ExampleIgor GjorgjievNessuna valutazione finora
- DEA Report of Bldg-1 - Final - 14!08!2018Documento111 pagineDEA Report of Bldg-1 - Final - 14!08!2018CEG BangladeshNessuna valutazione finora
- Camber GuidelineDocumento1 paginaCamber GuidelineShamsul IslamNessuna valutazione finora
- Sight Distance and Road AlignmentDocumento45 pagineSight Distance and Road AlignmentSyed Ali Raza ShahNessuna valutazione finora
- 6beam DesignDocumento41 pagine6beam DesignMohd Nurkhalis WainiNessuna valutazione finora
- Lap Perhit Struktur Jembatan Bentang 9M Lebar 8MDocumento23 pagineLap Perhit Struktur Jembatan Bentang 9M Lebar 8MDaron DaronoNessuna valutazione finora
- TorsionDocumento36 pagineTorsiondixn__Nessuna valutazione finora
- An Gording Trekstang Dan Ikatan Angin Triana JoossDocumento12 pagineAn Gording Trekstang Dan Ikatan Angin Triana JoossYudianus SamuelNessuna valutazione finora
- Bore Log Bor Mesin Underpass Bh-6Documento1 paginaBore Log Bor Mesin Underpass Bh-6Josua SigalinggingNessuna valutazione finora
- MekktekDocumento47 pagineMekktekreza batmanNessuna valutazione finora
- TR 334 Tutorial-1Documento5 pagineTR 334 Tutorial-1Adaminovic MrishoNessuna valutazione finora
- Case 1: Middle Span Carry Minimum LoadDocumento10 pagineCase 1: Middle Span Carry Minimum Loadsam_cm100% (1)
- Structural Analysis Chapter 12Documento47 pagineStructural Analysis Chapter 12Ronaldo Hertez100% (2)
- Moment DistributionDocumento153 pagineMoment DistributionHerbert P. BacosaNessuna valutazione finora
- Deep Beams FinalDocumento13 pagineDeep Beams FinalNilesh Balkrishna Sunita ApteNessuna valutazione finora
- Beam BucklingDocumento45 pagineBeam BucklingSaleha QuadsiaNessuna valutazione finora
- A. Shear and Moment Diagram: Draw The Shear and Moment Diagrams For The Beam Shown. Segments AC and CE Are Connected by Pin CDocumento4 pagineA. Shear and Moment Diagram: Draw The Shear and Moment Diagrams For The Beam Shown. Segments AC and CE Are Connected by Pin CStefanGraczykNessuna valutazione finora
- Struktur Baja II Part 03-Lentur 02Documento31 pagineStruktur Baja II Part 03-Lentur 02RatihNessuna valutazione finora
- Strengthening of Steep Slope by Nails, Anchors and Piles Using Geo-Studio SoftwareDocumento16 pagineStrengthening of Steep Slope by Nails, Anchors and Piles Using Geo-Studio SoftwareNTK RavalNessuna valutazione finora
- EARTHQUAKE LATERAL FORCE ANALYSIS (STATIC VS DYNAMIC) PDFDocumento41 pagineEARTHQUAKE LATERAL FORCE ANALYSIS (STATIC VS DYNAMIC) PDFJoshua Magat100% (1)
- Buckling Lengths of Irregular Frame ColumnsDocumento9 pagineBuckling Lengths of Irregular Frame ColumnsYi ZhuangNessuna valutazione finora
- Ketentuan Detail Tulangan Pada Struktur Beton Bertulang Sesuai SNI 2847-201X. HAKI Medan 20.07.2019 PDFDocumento223 pagineKetentuan Detail Tulangan Pada Struktur Beton Bertulang Sesuai SNI 2847-201X. HAKI Medan 20.07.2019 PDFRio FandiNessuna valutazione finora
- Lec1 Introduction 160214191607Documento14 pagineLec1 Introduction 160214191607Syazaa SalimNessuna valutazione finora
- 7 Design of Deep Flexural MemberDocumento56 pagine7 Design of Deep Flexural MemberSarah SpearsNessuna valutazione finora
- Desain Abutment OkDocumento41 pagineDesain Abutment OkDoni domara arziNessuna valutazione finora
- Handout 4: Design of Slabs A. ONE-WAY SLABS - Supported On Two Edges and Bends in Only One Direction. Please ReadDocumento7 pagineHandout 4: Design of Slabs A. ONE-WAY SLABS - Supported On Two Edges and Bends in Only One Direction. Please ReadKevin MedinaNessuna valutazione finora
- Slope Deflection MethodDocumento25 pagineSlope Deflection Methodmaylaleiborday50% (2)
- Slope Deflection ExamplesDocumento20 pagineSlope Deflection ExamplesSammish83Nessuna valutazione finora
- Analisis Struktur C4Documento47 pagineAnalisis Struktur C4Hazyema HarunNessuna valutazione finora
- 4 - Design of A Two Way Solid Slabs To BS8110Documento29 pagine4 - Design of A Two Way Solid Slabs To BS8110Ahmed Al-AmriNessuna valutazione finora
- Cantilever Retaining Wall DesignDocumento58 pagineCantilever Retaining Wall DesignNawanjana MaheepalaNessuna valutazione finora
- Analisis Penamp-Tul-RangkapDocumento52 pagineAnalisis Penamp-Tul-RangkapFerdinan RyanNessuna valutazione finora
- Comparison Between R.C.C and Steel Structures by Seismic AnalysisDocumento10 pagineComparison Between R.C.C and Steel Structures by Seismic AnalysisVikramNessuna valutazione finora
- Flexural Analysis of Beams: Concrete Structures DesignDocumento24 pagineFlexural Analysis of Beams: Concrete Structures DesignAdam VinsonNessuna valutazione finora
- Atap RevDocumento33 pagineAtap RevdhantyNessuna valutazione finora
- 701 - Akassimali Structural Analysis 4th US&SI TXTBKDocumento20 pagine701 - Akassimali Structural Analysis 4th US&SI TXTBKEugenio DerbesNessuna valutazione finora
- Displacement Method of AnalysisDocumento52 pagineDisplacement Method of Analysisahmad nabilNessuna valutazione finora
- m3l17 Lesson 17 The Slope-Deflection Method: Frames With SideswayDocumento21 paginem3l17 Lesson 17 The Slope-Deflection Method: Frames With SideswayVitor ValeNessuna valutazione finora
- Unit2-HPS Structural Analysis IIDocumento89 pagineUnit2-HPS Structural Analysis IISmr OnlyNessuna valutazione finora
- Harmonizing Effective Length K-Factors Between European and American Codes of PracticeDocumento21 pagineHarmonizing Effective Length K-Factors Between European and American Codes of PracticeKtk ZadNessuna valutazione finora
- Higher Tier - A To Astar (1A)Documento20 pagineHigher Tier - A To Astar (1A)Ahmed JihadiNessuna valutazione finora
- (13969) Sheet 17 Quadratic Equation BDocumento45 pagine(13969) Sheet 17 Quadratic Equation BAkshat RoyNessuna valutazione finora
- Grades 9 Daily Lesson Log School Grade Level 9 Teacher Learning Area MATHEMATICS Teaching Dates and Time Quarter FIRSTDocumento13 pagineGrades 9 Daily Lesson Log School Grade Level 9 Teacher Learning Area MATHEMATICS Teaching Dates and Time Quarter FIRSTIsabel0% (1)
- HMW 1 TextDocumento5 pagineHMW 1 TextCaseyJ.Li0% (1)
- University of Ghana (All Rights Reserved)Documento3 pagineUniversity of Ghana (All Rights Reserved)Mynel Kojo DenkyiNessuna valutazione finora
- Problem Set 10 Partition of Land1Documento13 pagineProblem Set 10 Partition of Land1Mhorien MacatangayNessuna valutazione finora
- Trigonometric Ratio (Maths)Documento60 pagineTrigonometric Ratio (Maths)adityaNessuna valutazione finora
- 2nd Session - Dr. S. P. AsokDocumento80 pagine2nd Session - Dr. S. P. AsoksivakgpulNessuna valutazione finora
- 54 WodzickiDocumento5 pagine54 WodzickigotunicornsNessuna valutazione finora
- CE 6109 Chapter-5Documento34 pagineCE 6109 Chapter-5Mahbub AlamNessuna valutazione finora
- Limits Quiz REVIEWDocumento9 pagineLimits Quiz REVIEWDiana HernandezNessuna valutazione finora
- Differential EquationDocumento117 pagineDifferential EquationGuruKPO100% (2)
- Final Exam in TrigoDocumento6 pagineFinal Exam in TrigomvmbappleNessuna valutazione finora
- Model Maths Eng QnsDocumento8 pagineModel Maths Eng Qnsdevika sajanNessuna valutazione finora
- Lecture 20 - 21 PDFDocumento66 pagineLecture 20 - 21 PDFJojie NabongNessuna valutazione finora
- Math Answers 1Documento4 pagineMath Answers 1Sumathi SrinivasNessuna valutazione finora
- Maths in Focus Worked Solutions Yr 11 Adv Ch3Documento130 pagineMaths in Focus Worked Solutions Yr 11 Adv Ch3LuoNessuna valutazione finora
- Drill and Practice 4 5 6Documento2 pagineDrill and Practice 4 5 6Marilyn CitadelNessuna valutazione finora
- Heat EquationDocumento124 pagineHeat Equationmario.sergionjr4394Nessuna valutazione finora
- (Advances in Applied Mathematics) Harendra Singh, H. M. Srivastava), Juan J. Nieto - Handbook of Fractional Calculus For Engineering and Science-CRC Press (2022)Documento318 pagine(Advances in Applied Mathematics) Harendra Singh, H. M. Srivastava), Juan J. Nieto - Handbook of Fractional Calculus For Engineering and Science-CRC Press (2022)Antonio Torres PeñaNessuna valutazione finora
- Structural Analysis of DomesDocumento10 pagineStructural Analysis of DomesThotho Kennedy100% (3)
- R. K. Jain - S. R. K. Iyengar - Advanced Engineering MathematicsDocumento1.481 pagineR. K. Jain - S. R. K. Iyengar - Advanced Engineering Mathematicsprashant.rathore73594100% (1)
- 2Documento2 pagine2sikkaNessuna valutazione finora
- Revised Syllabus PG2019-20 PDFDocumento10 pagineRevised Syllabus PG2019-20 PDFManoj BishtNessuna valutazione finora
- 0563 Bgcse MathematicsDocumento33 pagine0563 Bgcse MathematicsKennedy Absalom ModiseNessuna valutazione finora
- 18 Green's Function For The Poisson EquationDocumento5 pagine18 Green's Function For The Poisson EquationNestor Rodrigo Ahumada AhumadaNessuna valutazione finora
- A2 Level Trigonometry Revision: Three Further Trig RatiosDocumento7 pagineA2 Level Trigonometry Revision: Three Further Trig RatiosLauren ChikwehwaNessuna valutazione finora
- MATH Concepts PDFDocumento2 pagineMATH Concepts PDFs bNessuna valutazione finora