Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Centrilif Electrosumergible
Caricato da
Rey Adam100%(1)Il 100% ha trovato utile questo documento (1 voto)
467 visualizzazioni131 paginetecnico
Titolo originale
CENTRILIF ELECTROSUMERGIBLE
Copyright
© © All Rights Reserved
Formati disponibili
PDF, TXT o leggi online da Scribd
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentotecnico
Copyright:
© All Rights Reserved
Formati disponibili
Scarica in formato PDF, TXT o leggi online su Scribd
100%(1)Il 100% ha trovato utile questo documento (1 voto)
467 visualizzazioni131 pagineCentrilif Electrosumergible
Caricato da
Rey Adamtecnico
Copyright:
© All Rights Reserved
Formati disponibili
Scarica in formato PDF, TXT o leggi online su Scribd
Sei sulla pagina 1di 131
Centrilift, Una divisin de Baker Hughes
Copyright 1998 - 2004
Versin 7.3
Edicin Febrero 2004
Traduccin #2, Julio 2004
Las pantallas de despliegue y los ejemplos contenidos en este manual requieren que el
sistema Electrospeed GCS contenga las versiones indicadas de firmware. Por favor
comunicarse con Centrilift si necesita actualizacin del firmware del sistema.
Revisiones requeridas de Firmware del Sistema:
Unidad de Pantalla de Grficos: 5.00 o superior
Unidad de Control del Sistema: 7.00 o superior
Mdulo Conversin de Potencia: 9.15 o superior
2
TABLA DE CONTENIDO
INTRODUCCIN ............................................................7
DESCRIPCIN GENERAL .........................................7
CARACTERSTICAS/FUNCIONESBENEFICIOS .........8
SEGURIDAD E INSTALACIN......................................9
RECOMENDACIN DE SEGURIDAD........................9
TRANSPORTE Y ALMACENAMIENTO......................9
VERIFICACIONES INICIALES....................................9
INSTALACIN DEL CONTROLADOR......................10
CABLEADO DE ENERGA........................................10
SISTEMAS DE 12 PULSOS / QUE CUMPLEN CON IEEE
...................................................................................11
CABLEADO DE INTERFAZ CON EL USUARIO ......11
ENTRADAS DIGITALES INCORPORADAS.............11
SALIDAS DIGITALES INCORPORADAS .................12
ENTRADAS ANALGICAS INCORPORADAS ........12
INFORMACIN BSICA SOBRE GCS.......................13
GENERALIDADES SOBRE PANTALLA DE GRFICOS
...................................................................................13
DESPLIEGUE DE MEN, LECTURA O VALOR DE
CONFIGURACIN....................................................15
CONVENCIONES DE LA PANTALLA DEL GCS......15
MODIFICACIN DE LECTURA O DE PARMETRO DE
CONFIGURACIN....................................................16
OPERACIN BSICA..................................................17
BOTONES ARRANQUE / PARADA DE LA PANTALLA
...................................................................................17
SELECCIN DE MODO MANUAL/AUTOMTICO ..17
INTERRUPTORES MANUAL/ DETENIDO/ AUTOMTICO Y
DE ARRANQUE MONTADOS EN PANEL................17
PARMETROS DE REARRANQUE AUXILIARES...18
LEDS DE PANTALLA VERDE, MBAR Y ROJO.....18
LUCES DE PANEL ROJA, MBAR Y VERDE..........19
CONEXIN DE LUCES DE PANEL EXTERNAS ROJA
MBAR Y VERDE .....................................................19
INDICACIN DE ALARMA Y PARADA ....................20
CONDICIN DE BLOQUEO.....................................20
SEGURIDAD DEL SISTEMA.....................................20
RELOJ DEL SISTEMA ..............................................21
DIAGNSTICOS DE CITIBUS / AJUSTE DE CONTRASTE
...................................................................................21
REVISIONES DE SOFTWARE .................................22
DIAGNSTICOS DEL SISTEMA / AJUSTE DE CONTRASTE
...................................................................................22
MEN DE UTILITARIOS (UTILITY MENU) ..............22
LOS MENS DE GCS..................................................25
DESCRIPCIN GENERAL DE LA ESTRUCTURA DEL MEN
DE ELECTROSPEED GCS.......................................25
3
PANTALLA DE ESTADO (STATUS) ...........................26
CONFIGURACIN DE ESPEED GCS (ESPEED GCS SETUP)
.......................................................................................27
CONFIGURACIN 1 DEL GCS (GCS SETUP 1).....27
CONFIGURACIN 2 DEL GCS (GCS SETUP 2).....30
CONFIGURACIN 3 DEL GCS (GCS SETUP 3).....34
ARRANQUES (STARTS) ..........................................36
REGISTRO E HISTORIA (DATALOG & HISTORY)....39
HISTORIA DE PARADAS (SHUTDOWN HISTORY)39
DETALLE DE PARADAS (SHUTDOWN DETAIL) ....39
REGISTROS DE EVENTOS (EVENT RECORDS)...40
HISTORIA DE FUNCIONAMIENTO (RUN HISTORY)40
REGISTRO DE DATOS EN TARJETA DE PC .........42
CONFIGURAR REGISTRO DE DATOS (DATALOG SETUP)
...................................................................................43
GUARDAR DATOS HISTRICOS (SAVE HISTORICAL DATA)
...................................................................................44
GUARDAR/CARGAR CONFIGURACIN DEL SISTEMA
(SAVE/LOAD SYSTEM SETUPS).............................44
GUARDAR CONFIGURACIN (SAVE SETUP).......45
CARGAR CONFIGURACIN DESDE TARJETA DE PC
(LOAD SETUP FROM PC CARD).............................46
CARGAR CONFIGURACIN DE TARJETA DE PC
SELECCIONAR ARCHIVO (LOAD SETUP FROM PC CARD
SELECT FILE) ...........................................................46
FUNCIONES DE DIRECTORIO / ARCHIVOS (DIRECTORY /
FILE FUNCTIONS) ....................................................47
INFORMACIN AVANZADA (ADVANCED INFORMATION)
...................................................................................48
INFORMACIN DEL SITIO (SITE INFORMATION).48
GRFICOS (GRAPHING) .........................................49
GRFICO DE AMPERAJE B ( B AMPCHART)..49
FALLAS Y ALARMAS (FAULTS & ALARMS)............51
SOBRECARGA (OVERLOAD)..................................51
BAJA CARGA (UNDERLOAD)..................................53
SOBREVOLTAJE DE ENTRADA (INPUT OVRVLT) 54
BAJO VOLTAJE DE ENTRADA (INPUT UNDVLT) ..55
DESBALANCE DE VOLTAJE DE ENTRADA (INPUT VUNBAL)
...................................................................................57
PARADA POR BAJA VELOCIDAD (LOW SPEED TRIP)
...................................................................................58
SENSORES DE TEMPERATURA (TEMP SENSORS)59
DISIPADOR DE CALOR 1 (HEATSINK 1) ................59
DISIPADOR DE CALOR 2 (HEATSINK 2) ................60
DISIPADOR DE CALOR 3 (HEATSINK 3) ................60
DISIPADOR DE CALOR 4 (HEATSINK 4) ................61
TEMPERATURA DE INDUCTOR (INDUCTOR TEMP)61
TEMPERATURA AMBIENTE (AMBIENT TEMP)......61
TEMPERATURA AUXILIAR (AUXILIARY TEMP).....62
FALLA DE TELEMETRA (TELEMETRY FAIL) ........62
CONFIGURACIN DE ALARMAS (ALARM SETUP)64
4
FUNCIONES DE LGICA PROGRAMABLE
(PROGRAMMABLE LOGIC FUNCTIONS)..................65
CONFIGURACIN DE FUNCIONES PROGRAMABLES
(PROG FUNCT SETUP)............................................65
CONTROL DE FRECUENCIA DE SALIDA (OUTPUT
FREQUENCY CONTROL) ........................................65
BLOQUE PLC DE USUARIO (USER PLC BLOCK) .70
MODIFICAR BLOQUE PLC (EDIT PLC BLOCK) .....70
MODIFICAR PUNTO DE USUARIO (EDIT USER POINT)
...................................................................................72
ALARMAS DEFINIDAS POR EL USUARIO (USER DEFINED
ALARMS) ...................................................................73
ALARMA DE USUARIO 1 (USER ALARM 1) ...........74
ALARMAS DE USUARIO 2 A 8.................................75
PANTALLA DEL USUARIO (CUSTOM USER SCREEN)
.......................................................................................75
MEN DEL USUARIO (CUSTOM USER MENU).....76
SCADA Y SEGURIDAD Y SISTEMA (SCADA & SECURITY &
SYSTEM).......................................................................76
SISTEMA (SYSTEM).................................................76
CONFIGURACIN DE RCB (RCB SETUP) .............77
REVISIN DE SOFTWARE (SOFTWARE REV NUM)78
CONFIGURACIN DE SCADA (SCADA SETUP)....79
ESTADSTICAS DE COMUNICACIONES SCI (SCI COM
STATS) ......................................................................81
ESTADSTICAS DE COMUNICACIONES CIM (CIM COM
STATS) ......................................................................81
SEGURIDAD (SECURITY)........................................82
HORA ACTUAL (CURRENT TIME) ..........................83
DEFINIR HORA (SET TIME) .....................................83
CONFIGURACIN Y DESPLIEGUE ANALGICOS (ANALOG
SETUP & DISPLAY) .....................................................84
CONFIGURACIN ANALGICA (ANALOG SETUP)84
MDULOS GCS (GCS MODULES).............................85
E/S INCORPORADA (ONBOARD I/O)......................85
ENTRADA ANALGICA INTERNA 1 (INTERNAL ANALOG
INPUT 1) ....................................................................85
CONFIGURACIN DE LMITE SUPERIOR (HIGH
THRESHOLD SETUP) ..............................................86
CONFIGURACIN DE LMITE INFERIOR (LOW THRESHOLD
SETUP)......................................................................87
ENTRADA ANALGICA INTERNA 2 (INTERNAL ANALOG
INPUT 2) ....................................................................88
ENTRADA DIGITAL INTERNA 1 (INTERNAL DIGITAL INPUT
1)................................................................................88
ENTRADA DIGITAL INTERNA 2 (INTERNAL DIGITAL INPUT
2)................................................................................90
ENTRADA DIGITAL INTERNA 3 (INTERNAL DIGITAL INPUT
3)................................................................................90
SALIDAS DIGITALES INTERNAS 1, 2 Y 3 (INTERNAL
DIGITAL OUTPUT 1, 2 AND 3) .................................90
5
MDULO DE EXPANSIN DE E/S 1 (EXPANSION I/O
MODULE 1) ...............................................................91
MDULO DE EXPANSIN DE E/S 2.......................91
MDULO DE EXPANSIN DE E/S 3.......................91
ESTADO DE MDULOS (MODULES STATUS) ......91
EXPANSIN Y OPCIONES..........................................92
CENTINEL.................................................................92
MDULO DE COMUNICACIN DE DATOS REMOTOS
(RDCM)......................................................................92
INTERFAZ DE COMUNICACIONES VORTEX MODELO VCI-
142.............................................................................93
PAQUETE SENSOR DE PRESIN EN FONDO DE POZO
CENTRILIFT..............................................................93
EQUIPO DE TERCEROS..........................................93
MANTENIMIENTO........................................................93
DIAGNSTICO DE FALLAS........................................95
APNDICE A: ESPECIFICACIONES Y CAPACIDADES
.......................................................................................96
APNDICE B: HOJA DE ARRANQUE INICIAL..........97
APNDICE C: REGISTRO DE INSTALACIN/ SERVICIO
.......................................................................................98
APNDICE E: CAPACIDADES DE VSC DE MOMENTO DE
TORSIN VARIABLE.................................................100
FUSIBLES DE ENTRADA.......................................100
APNDICE F: CONFIGURACIN BSICA ..............100
APNDICE F: CONFIGURACIN BSICA ..............101
FORMACIN DE CAPACITORES..........................103
APNDICE G: ARRANQUE.......................................104
CONFIGURACIN SIN CARGA.............................104
ARRANQUE ............................................................104
APNDICE H: PESOS Y DIMENSIONES..................106
MODELO NMERO: 1060 GCS / 1125 GCS .........106
MODELO NMERO: 2000 GCS (NEMA 1) ............107
MODELO NMERO: 2000 GCS (NEMA 4) ............108
MODELO NMERO: 2000 GCS PWM (NEMA 4) ..109
MODELO NMERO: 4000 GCS (NEMA 1) ............110
MODELO NMERO: 4000 GCS (NEMA 4) ............111
MODELO NMERO: 4000 GCS PWM (NEMA 4) ..112
MODELO NMERO: 8000 GCS (NEMA 1) ............113
MODELO NMERO: 8000 GCS (NEMA 4) ............114
MODELO NMERO: 8000 GCS PWM (NEMA 4) ..115
DIMENSIN DE PLACA DE CONEXIN / CONECTOR:
NEMA 1....................................................................116
6
DIMENSIN DE PLACA DE CONEXIN / CONECTOR:
NEMA 4....................................................................116
DIMENSIN DE PLACA DE CONEXIN / CONECTOR:
NEMA 4....................................................................117
APNDICE I: DIAGRAMAS ESQUEMTICOS.........118
ESQUEMTICO DE CONTROL DE BLOQUE SERIES 1000,
2000, 4000...............................................................118
ESQUEMTICO BSICO DE ENERGA SERIES 1000, 2000,
4000.........................................................................119
ESQUEMTICO BSICO DE ENERGA SERIES 1000, 2000,
4000.........................................................................120
ESQUEMTICO DE CONTROL DE BLOQUE SERIE 8000
.................................................................................120
ESQUEMTICO DE CONTROL DE BLOQUE SERIE 8000
.................................................................................121
ESQUEMTICO BSICO DE ENERGA SERIE 8000122
ESQUEMTICO BSICO DE ENERGA SERIE 8000123
APNDICE J: CONTROLADORES MULTIGABINETE126
CONEXIN, CONFIGURACIN Y OPERACIN DE
CONTROLADORES MULTIGABINETE..................126
NDICE ........................................................................130
7
INTRODUCCIN
Este manual contiene informacin general relativa al sistema
operativo GRAPHIC CONTROL SYSTEM (GCS, o Sistema de
Control Grfico), e instrucciones especficas para la instalacin,
configuracin y operacin del Controlador de Velocidad Variable
Electrospeed (GCS).
DESCRIPCIN GENERAL
El Electrospeed GCS est clasificado como un inversor de voltaje
variable (VVI en ingls). Usa un rectificador controlado por silicio
(SCR en ingls) de seis pulsos para convertir energa de CA en
energa de CC de voltaje variable. Se pueden configurar
controladores con conversores de mayor nmero de pulsos
(identificados como controladores de 12 o 18 pulsos) donde se
requiera reduccin armnica. Se usan un inductor y capacitores
en serie a travs del bus de CC para filtrar la fluctuacin de CA.
El inversor usa seis transistores bipolares de puerta aislada
(IGBT) de energa para sintetizar un voltaje de salida trifsico
cuasi sinusoidal usando el algoritmo de inversin SelectWave
TM
de Centrilift. Este moderno inversor de voltaje variable de CA
est diseado para satisfacer todos los requerimientos de
instalaciones que precisen una fuente de frecuencia variable.
Opera directamente a partir de energa trifsica de 50/60 Hertz
de 380 a 480 VCA.
El uso de la ms moderna tecnologa de microprocesadores
permite una fcil configuracin, operacin y diagnstico. El micro
control reduce tambin el nmero de tarjetas de circuitos
requeridas mejorando por ende la confiabilidad y versatilidad del
controlador. La interfaz grfica del operador brinda un fcil uso y
programacin de aplicaciones especiales. El GCS se puede
programar para muchos tipos de cargas, tales como momento de
torsin (torque) variable , momento de torsin constante, y voltaje
constante con un rango de velocidades extendido. El sistema de
control del GCS brinda tambin una interfaz de telemetra de alta
velocidad (CITIBus
TM
) que simplifica la expansin y ajuste del
sistema de control.
El Sistema de Control Grfico Electrospeed est disponible en
dos tipos de gabinetes; impermeable (NEMA 4, IP56) y de uso
general (NEMA 1, IP21). Las unidades impermeables usan un
sistema de refrigeracin patentado que elimina los problemas de
ineficiencia y confiabilidad asociados con las bombas de calor.
Cada uno de los dos tipos se ofrece en cuatro tamaos de
cerramientos denominados series "1000", "2000", "4000" y
8000.
El controlador Electrospeed GCS se puede comunicar con
SCADA o sistemas de telemetra usando el protocolo Modbus
RTU y la interfaz de hardware RS-232 incorporados. Los
mdulos de expansin de Entrada/Salida pueden agregarse al
sistema para proveer un punto nico de control y monitoreo para
una amplia gama de tipos de detectores.
8
CARACTERSTICAS/FUNCIONESBENEFICIOS
Listo para Conectividad, Telemetra Permite redes u operacin remota
Configuracin que se puede bajar Fcil configuracin de controladores mltiples
Capacidad de expansin de sistema de control Flexibilidad en diseo y configuracin del
por medio de mdulos de E/S sistema
Interfaz con el operador GCS Personal de mantenimiento y operaciones
idntica para necesita aprender la interfaz solamente una
todos los productos GCS vez
Tecnologa de electrnica para Tarjetas de circuitos ms pequeas, con menos
montaje en superficies conexiones implican mejor confiabilidad
Software actualizable en el campo El controlador no debe ser movido de su lugar
para modificar o actualizar el software
El sistema de registro de datos crea archivos Permite el monitoreo y anlisis de los datos
compatibles con hojas de clculo registrados usando herramientas de software
familiares de PC.
Registrador Electrnico de Grficos incorporado Permite registro de corriente de motor sin
papeles
Resguardo redundante de datos y parmetros Reduce posibilidad de prdida de datos y de parmetros
de proteccin debido a falla.
Historia con fecha / hora de eventos y paradas Ayuda a identificar problemas o tendencias
Ventanas de diagnstico / alarma aparecen Despliegue automtico de problemas sin
automticamente aprobacin de seguridad de operador
E/S Programable Se puede programar que las E/S funcionen en
forma independiente de la operacin del controlador,
similar a un controlador de lgica programable (PLC en
ingls) independiente
Compatible con toda la lnea de productos GCS Se facilita la interfaz y la configuracin con
otros productos de Centrilift.
Los gabinetes cumplen con las normas Operacin confiable en cualquier entorno
industriales NEMA 4, IP56, NEMA 1, IP21
Operacin en seis pasos o con Modulacin Formas de onda de salida a opcin del
de Ancho de Pulso (PWM) sin operador ofrecen flexibilidad de aplicacin
cambios de hardware
9
SEGURIDAD E INSTALACIN
RECOMENDACIN DE SEGURIDAD
El controlador deber ser instalado, ajustado y mantenido por
personal capacitado de mantenimiento elctrico. La instalacin u
operacin inadecuada del controlador pueden ocasionar lesiones
al personal o daos a los equipos. El controlador debe ser
instalado y conectado a tierra de acuerdo con los cdigos
elctricos locales y nacionales. Hay voltajes dentro del gabinete
que pueden ser fatales. Se deben tomar precauciones extremas
para asegurar que todas las fuentes de energa estn
desconectadas antes de comenzar cualquier trabajo de
instalacin, mantenimiento o reparacin.
TRANSPORTE Y ALMACENAMIENTO
El controlador Electrospeed deber ser amarrado en forma
segura a todo vehculo usado para transportar la unidad. Use
sogas o correas para inmovilizar la unidad durante el transporte y
evitar daos durante el envo del mismo. Para evitar daos
durante el almacenamiento o transporte, la unidad no debe ser
almacenada ni transportada en atmsferas corrosivas. Los
gabinetes estn especialmente diseados para que puedan
manejarse en forma segura usando una barra travesao
colocada a travs de las agarraderas de izamiento en la parte
superior de la unidad. Deber verificarse la capacidad de
izamiento antes de mover la unidad a su posicin. Ver el
Apndice A para verificar la medida y el peso de la unidad
especfica que se est instalando.
VERIFICACIONES INICIALES
Antes de instalar el controlador, revise la unidad para verificar lo
siguiente:
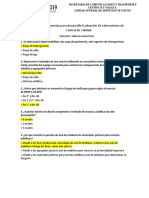
* Dao fsico al controlador. Dao visual al contenedor de transporte o al
gabinete.
FRONT VIEW
Lifting Lugs
4000 NEMA 3, GCS
RIGHT SIDE VIEW
10
* Quitar todos los materiales de empaque, incluyendo cinta, relleno, espuma o
materiales para restringir el movimiento durante el transporte.
* Aplicacin correcta. Los datos de placa del controlador, los transformadores y la
carga deben ser compatibles.
* Conexiones internas. Asegurar que todos los tableros de circuitos, cables,
componentes y conectores estn en su lugar en forma segura.
INSTALACIN DEL CONTROLADOR
El gabinete de uso general (NEMA 1, IP21) es adecuada para la
mayora de las instalaciones de salas de fbrica o de control, sin
embargo, se debe tener cuidado al seleccionar la ubicacin. El
rea debe estar bien ventilada para permitir un flujo de aire
irrestricto a travs de la entrada filtrada del controlador. La
entrada y salida de aire de refrigeracin est ubicada en el frente
del controlador, por lo tanto no se requiere espacio en los
costados, parte trasera o superior. Para servicio se recomienda
un espacio mnimo de 36 pulgadas (1 m.) frente al gabinete,
espacio tambin adecuado para el flujo de aire de refrigeracin.
Se debern evitar las reas que tengan vapor o roco de aceite,
humedad excesiva, o con emanaciones o vapores que sean
corrosivos o inflamables.
El gabinete Impermeable (NEMA 3, IP56) es adecuada para
instalaciones exteriores en lugares no peligrosos. Permitir un
espacio mnimo de 48 pulgadas (1.22 m) al frente y al fondo del
gabinete para servicio, y para satisfacer los requerimientos de
flujo de aire. Nunca instalar el controlador cerca de fuentes
generadoras de calor tales como transformadores u otros
controladores. Es necesario tener un suministro irrestricto de aire
de refrigeracin (mximo de 50 C) para el(los) ventilador(es) de
refrigeracin montados en la parte trasera del gabinete.
CABLEADO DE ENERGA
Se proveen placas de conexin para la entrada de cables en el
tope de los controladores NEMA 1 y en la parte inferior de la caja
de conexiones en los controladores NEMA 4. Ver tablas en el
Apndice D para detalles de Medidas de Conexiones,
Agarraderas y Cables y de las ubicaciones de las conexiones de
cables.
El controlador debe estar conectado a tierra por medio de la
barra de bus de tierra. Ver tablas en el Apndice D para la
medida de la conexin a tierra.
El cableado de energa debe estar dimensionado para satisfacer
los cdigos elctricos locales y nacionales, en base a la
temperatura ambiente mxima. Conecte el cable de energa de
entrada a las terminales del interruptor de desconexin de
entrada (serie 1000 y todos los controladores NEMA 1) o de la
caja de conexiones (NEMA 4, controladores de las series 2000,
4000 y 8000). Este controlador no necesita secuencia de fase
para la entrada de energa. El cable de salida de energa se
conecta desde las terminales de salida a las terminales de
entrada del transformador elevador cuando se lo utilice o a las
terminales de entrada del motor elctrico.
Top View - Actual dimensions vary with model number
11
SISTEMAS DE 12 PULSOS / QUE CUMPLEN CON IEEE
Cuando se necesita minimizar la distorsin armnica en la lnea
de suministro de energa, se puede configurar el Electrospeed
GCS para usar una configuracin de conversin de 12 pulsos. En
esta configuracin, se usa un transformador desfasador adicional
para crear un desfase de 30 grados en la energa de entrada. La
salida de este transformador desfasador se conecta a la segunda
seccin de conversin del controlador. Si se requiere una
distorsin armnica an menor, se puede configurar un sistema
que cumpla con las normas IEEE. Comunquese con
Tecnologas de Control de Centrilift (Centrilift Control
Technologies) para ms informacin.
CABLEADO DE INTERFAZ CON EL USUARIO
Las entradas y salidas de control instaladas en fbrica estn
conectadas directamente a los cabezales MOLEX montados en
la Placa de Control del Sistema. El cableado de control de CA
debera ser como mnimo 14 AWG, y correr en un conducto
separado del cableado de control de CC. Las entradas
analgicas (Anlogo 1 y 2) deberan estar conectadas con un
cable encapsulado, conectado a tierra, de par enroscado, de al
menos 20 AWG. Cuando se instalan cables no especificados
para 600V, tales como cables de comunicacin, dichos cables
deben ser instalados con los cables de bajo voltaje (no en
contacto con el cableado especificado para 600V).
ENTRADAS DIGITALES INCORPORADAS
La placa de control del sistema (SCB en ingls) suministra tres
estados o entradas digitales definidas como interruptores de
cierre a tierra. Las entradas tienen terminales en la SCB J28,
conectores 1 al 4. Las definiciones de los conectores son las
siguientes:
Conector 4 = Digital Comn
Conector 3 = Entrada Digital No. 3 (o interruptor de Modo
Manual)
Conector 2 = Entrada Digital No. 2 (o interruptor de Modo
Arranque Automtico)
Conector 1 = Entrada Digital No. 1 (o interruptor de arranque por
botn ARRANQUE (START))
Estas entradas estn diseadas slo para seales originadas
dentro de los gabinetes del GCS, por ejemplo: PHD o MTM
J28
1
2
3
4
12
SALIDAS DIGITALES INCORPORADAS
La placa de control del sistema provee tres salidas digitales
usadas generalmente para conectar las luces exteriores del
panel VERDE, MBAR y ROJA. Las terminaciones estn
localizadas en los conectores de la placa de control del sistema
(SCB) etiquetados J24. Las tres salidas son de contacto seco,
contactos de rel normalmente abierto (N.A.) diseados para 10
Amperios a @ 250 Voltios.
Las conexiones para el J24 son:
Digital 1: Conectores 1 y 3 (Luz verde RUN)
Digital 2: Conectores 5 y 7 (Luz mbar)
Digital 3: Conectores 9 y 11 (Luz roja)
Los conectores numerados 2, 4, 6, 8, 10 y 12 no tienen
conexiones.
ENTRADAS ANALGICAS INCORPORADAS
La placa de control del sistema provee dos entradas analgicas
diseadas para 0 a 10 VCC terminadas en la SCB J26. La
interfaz de seales de 4-20ma requiere la conexin de un resistor
de 500 ohm a travs de las terminales Entrada analgica y
Tierra analgica y la calibracin de los parmetros
desplazamiento y rango (offset y span en ingls) en los mens
de configuracin de entrada analgica. Las definiciones de los
conectores son las siguientes:
Conector 1 = Entrada analgica 1
Conector 2 = Entrada analgica 2
Conector 3 = Tierra analgica comn
1
2
3
4
5
6
7
8
9
10
11
12
J24
J26
1
2
3
13
INFORMACIN BSICA SOBRE
GCS
GENERALIDADES SOBRE PANTALLA DE GRFICOS
Esta seccin del manual del operador de GCS describe los
principios bsicos del Sistema Operativo de Control Grfico
(Graphic Control System, o GCS, en ingls). Tambin describe la
operacin del teclado, la pantalla de LCD (diodos de cristal
lquido) y todos los parmetros disponibles. Para ubicar la
informacin relativa a cualquier parmetro especfico, usar el
ndice al final de este manual para localizar una palabra clave,
luego leer la informacin en la(s) pgina(s) indicada(s). El
Controlador Electrospeed GCS utiliza una pantalla de cristal
lquido (LCD en ingls) como interfaz primaria con el operador.
Usando este despliegue, el operador puede ver y/ o modificar
todos los valores de configuracin contenidos en el controlador.
En el momento en que el Electrospeed GCS sea arrancado por
primera vez, la pantalla LCD mostrar la pantalla de MEN
PRINCIPAL (MAIN MENU en ingls), similar a la ilustracin de la
izquierda.
La interfaz tiene varios interruptores por teclado cuyas funciones
se definen a continuacin:
La tecla verde ARRANCAR (START) se oprime para arrancar el
motor en forma manual.
La tecla roja PARAR (STOP) detiene el motor manualmente y se
usa tambin para eliminar o restaurar una condicin de
bloqueo.
Las teclas con flechas se usan para mover el cursor en la
pantalla o para aumentar o disminuir nmeros cuando se calibra
o modifica un valor de configuracin.
La tecla INGRESAR (ENTER) se usa para seleccionar renglones
resaltados del men o para programar o finalizar un valor de
configuracin o ingreso de valor.
La tecla MEN (MENU) se usa como tecla de resguardo o
cancelacin para abortar cualquier ajuste que se est realizando.
Oprima MEN en forma repetida para acceder a la pantalla de
MEN PRINCIPAL (MAIN MENU).
START
STOP
ENTER
MENU
14
Los LEDs (diodos emisores de luz) verde, mbar y rojo del panel
indican el estatus actual del motor. El verde indica que el sistema
est funcionando. El verde con mbar intermitente indica que el
controlador tiene una alarma activa de tiempo para detener el
sistema. El mbar solo indica que el sistema est detenido pero
que todas las alarmas estn desactivadas y que el sistema est
controlando el tiempo para volver a arrancar automticamente. El
ROJO indica que el sistema est detenido y que el arranque
automtico est inhibido, y/ o que hay alarmas activas de forma
tal que el controlador no volver a arrancar por s mismo.
15
DESPLIEGUE DE MEN, LECTURA O VALOR DE
CONFIGURACIN
El operador interacta con el Electrospeed GCS oprimiendo los
botones ubicados debajo de la pantalla de LCD. Use las teclas
con flecha para mover el puntero de resalte al rengln deseado
en el men y luego oprima el botn ENTER para seleccionar
dicho rengln. (Aunque el puntero de resalte cambia de
apariencia dependiendo de la informacin desplegada en la
pantalla, siempre est implementado con un color inverso
comparando con el resto del texto en la pantalla). Por ejemplo,
para desplegar el estatus de operacin actual del motor, use las
teclas con flecha para mover el resalte a la posicin central
STATUS como se muestra en la pgina anterior y oprima la
tecla ENTER. El GCS desplegar la pantalla de estatus y
mostrar la informacin de estatus de operacin similar a la
pantalla que se ve a la izquierda. Para volver al men anterior,
oprima la tecla MENU y el despliegue volver a la pantalla
MEN PRINCIPAL.
CONVENCIONES DE LA PANTALLA DEL GCS
Todos los mens y pantallas del GCS usan smbolos comunes
para transmitir informacin. Por ejemplo, cuando una pantalla de
men contiene ms informacin que la que cabe en una pgina
de despliegue, aparecer el grfico al final de la
pantalla. Este grfico indica que se pueden usar las teclas con
flecha para mover el cursor al fondo de la pgina, haciendo que
el texto en la pantalla se desplace hacia arriba hasta que se
despliegue la ltima lnea del men. Varias pantallas de men
pueden enlazarse tambin por medio de las teclas de flecha a
izquierda y derecha. Esto se indica con los grficos y
que aparecen en el extremo izquierdo y derecho de la
barra al tope de la pantalla. Cuando se puede modificar un
parmetro, aparece la pequea punta de flecha en el borde
derecho de la lnea del parmetro. Note que slo algunos
parmetros en la pantalla de ejemplo que se muestra a la
izquierda pueden ser modificados.
Este puntero al final de la lnea indica que el parmetro puede
modificarse.
Indica que se puede acceder a mens adicionales oprimiendo la
tecla de flecha izquierda.
Se puede acceder a mens adicionales oprimiendo la techa de
flecha derecha.
Se puede acceder a ms informacin o renglones adicionales del
men oprimiendo la tecla de flecha hacia arriba o abajo y
moviendo el cursor al fondo o al tope de la pantalla.
16
MODIFICACIN DE LECTURA O DE PARMETRO DE
CONFIGURACIN
Todo parmetro del Electrospeed GCS que pueda ser modificado
desplegar una pequea punta de flecha en el extremo derecho
de la barra del cursor. Para modificar cualquiera de estos
parmetros, use las teclas con flecha y la tecla ENTER para
hacer que el valor deseado sea resaltado por el cursor. Cuando
est all, oprima la tecla ENTER para activar el modo edicin
para dicho valor. El valor actual de ese parmetro aparecer en
color inverso como se ve en la ilustracin de la izquierda.
Ahora, oprimiendo las teclas con flecha hacia arriba/abajo se
ocasionar que el valor aumente o disminuya. Cuando la lectura
llegue al valor deseado, suelte la tecla de flecha, luego oprima y
libere la tecla ENTER para guardar el nuevo valor modificado. Si
el usuario desea abortar la modificacin, simplemente oprima la
tecla MENU en lugar de la tecla ENTER para cancelar los
cambios.
Si se requiere realizar un cambio de gran valor, el usuario puede
usar las teclas con flecha IZQUIERDA/DERECHA para mover el
cursor a la posicin del dgito apropiado y luego usar las teclas
con flecha ARRIBA/ABAJO para cambiar ese dgito. Por ejemplo,
las ilustraciones de la izquierda muestran los pasos realizados
para cambiar el valor del Rango Mximo de la Entrada Analgica
No. 1 de 300 a 3300.
Note, si el controlador no permite que el usuario modifique
ningn valor aunque la punta de flecha de modificacin est
desplegada, es posible que la seguridad del sistema haya sido
activada y que el usuario deba ingresar primeramente una
contrasea vlida. Lea la seccin SEGURIDAD DEL SISTEMA
para aprender cmo trabajar con los niveles de seguridad. Los
parmetros o renglones de men slo para lectura no
despliegan el pequeo smbolo grfico triangular en el lado
derecho de la lnea de despliegue.
La pantalla de la izquierda muestra Valor Actual (Present Value)
slo para lectura, tres parmetros modificables y dos renglones
de men.
17
OPERACIN BSICA
BOTONES ARRANQUE / PARADA DE LA PANTALLA
El teclado de la pantalla del Electrospeed GCS ofrece botones
discretos por presin para arrancar y parar. Para arrancar el
motor manualmente, oprima el botn START. Para parar el motor
en funcionamiento, o para liberar una condicin de bloqueo,
oprima el botn STOP de la unidad de despliegue.
SELECCIN DE MODO MANUAL/AUTOMTICO
El modo operativo manual o automtico (HAND o AUTO en
ingls) est determinado por el estatus del parmetro AUTO
ARRANQUES INTERNOS (Int Auto Rstrt) que se encuentra en la
pantalla STARTS de los mens de Configuracin Bsica del
Controlador (BASIC DRIVE SETUP). Cuando este parmetro
est en S (YES), el modo de ARRANQUE AUTOMTICO est
seleccionado. El controlador arrancar el motor automticamente
luego de que el tiempo de demora de arranque haya expirado, si
no hay alarmas activas. El motor puede ser arrancado en
cualquier momento oprimiendo el botn START a menos que se
haya activado el valor de configuracin de ESPERAR TIEMPO
DE ARRANQUE (Wait Fr Rstrt T). En este caso, el motor no
arrancar hasta que la demora de tiempo de arranque haya
expirado. No se permitir arrancar el motor en ningn caso en
que haya alguna alarma activa que no tenga una demora de
salto de arranque asociada. Si ha ocurrido una parada que
origina una condicin de bloqueo, la condicin debe ser
eliminada antes de que el controlador permita volver a arrancar.
Se puede eliminar una condicin de bloqueo oprimiendo el
interruptor por botn STOP en el teclado del despliegue. Cuando
el parmetro AUTO ARRANQUES INTERNOS (Int Auto Rstrt)
est en NO, el modo manual de operacin est seleccionado.
Cuando el modo manual est seleccionado, el motor puede
arrancarse slo en forma manual oprimiendo el botn de
arranque.
INTERRUPTORES MANUAL/ DETENIDO/ AUTOMTICO Y DE
ARRANQUE MONTADOS EN PANEL
El modo de operacin del controlador puede determinarse
tambin por el estado de interruptores de modo Hand/Off/Auto
(HOA en ingls) y ARRANQUE, opcionales, montados en el
exterior. Se puede detener un motor en movimiento o se puede
eliminar una condicin de bloqueo en forma manual cambiando
la posicin del interruptor HOA a la posicin OFF y luego de
vuelta al modo de operacin deseado, Manual (Hand) o
Automtico (Auto). Si se usan los interruptores externos
montados en el panel, asegrese de habilitarlos cambiando el
parmetro HOA EXTERNO (EXTERNAL HOA) a S (YES).
Este parmetro se encuentra en un submen de la seleccin de
men SCADA Y SEGURIDAD Y SISTEMA.
START
STOP
OFF
AUTO HAND
18
PARMETROS DE REARRANQUE AUXILIARES
Cuando se ha configurado al controlador GCS para que arranque
automticamente, ste usa normalmente dos parmetros
globales, Mximo de Arranques Autorizados (Maximum Allowed
Restarts) y Demora para Arranque (Restart Time Delay), para
determinar cuntos arranques se permiten y cunto tiempo
esperar antes de intentar el arranque. Sin embargo, en ciertas
ocasiones puede desearse configurar esos parmetros de
arranque en forma distinta dependiendo de cul fue la causa de
la parada. La mayora de las alarmas de parada del controlador
GCS tienen un juego de parmetros de arranque asociados a
ellas. Cuando stos estn habilitados, y el controlador para
debido a esa condicin especfica, ste usar esos parmetros
para controlar el intento de arranque. Si esos parmetros no
estn habilitados, pero se permiten arranques automticos, el
controlador usar los valores globales de demora de arranque e
intentos de arranque.
LEDS DE PANTALLA VERDE, MBAR Y ROJO
La unidad de despliegue del Electrospeed GCS tiene LEDs
(Diodos Emisores de Luz, o Light Emitting Diodes en ingls)
incorporados. Estas luces funcionan de manera un poco distinta
a cualquier otra luz en panel externa, opcional y no son
afectados por la seleccin del modo de luces de panel. Estas
luces pueden usarse en combinacin de manera que los estados
combinados indican lo siguiente.
Luz verde encendida fija: El motor est funcionando sin
paradas o alarmas pendientes.
Luz verde encendida con mbar intermitente: El motor est
funcionando, pero hay una alarma activa y su demora asociada
est siendo controlada hasta expirar. Si la alarma persiste hasta
que haya expirado la demora asociada, el motor se detendr.
Luz mbar encendida sola: El motor est detenido, pero no hay
alarmas activas y el motor arrancar automticamente cuando
haya expirado la demora de arranque. Si el parmetro Tiempo
de Espera para Arranque est inhabilitado, el motor puede ser
arrancado en cualquier momento oprimiendo el botn de
arranque.
Luz roja encendida fija: El motor est detenido debido a parada
manual o del operador o un comando de parada del computador
central.
Luz roja encendida intermitente: El motor est detenido debido
a una de las alarmas habilitadas. El motor no arrancar sin
intervencin del operador.
19
Luz roja encendida intermitente con mbar: El motor est
detenido debido a una de las alarmas habilitadas. El motor
arrancar cuando haya expirado la demora de arranque.
LUCES DE PANEL ROJA, MBAR Y VERDE
Si las luces Roja, mbar y Verde estn instaladas en el gabinete
y conectadas a las terminales de salida digital correspondientes,
el Electrospeed GCS operar las luces de acuerdo a los modos a
continuacin. El operador puede seleccionar estos modos de
operacin en el Men Ext. Light Md de la pantalla del men
SISTEMA. En todos los modos, la luz VERDE indica que el motor
est funcionando.
MODO DE LUZ EXTERNA: VORTEX
La luz roja indica que el motor est detenido y que no habr un
arranque automtico. Esto puede deberse a:
1: Hay an una alarma activa, o
2: La ltima parada origin una condicin de bloqueo, o
3: El interruptor Hand/Off/Auto est en la posicin Parada (OFF)
o Manual (Hand), o
4: El controlador ha recibido un comando de parada vlido desde
un computador central.
La luz mbar indica que el motor est detenido, pero que todas
las alarmas han sido eliminadas y que el controlador est
contando la Demora de Arranque. Cuando esta demora haya
expirado el Electrospeed GCS arrancar automticamente.
La luz verde del panel indica que el motor est funcionando.
MODO DE LUZ EXTERNA: KRATOS
En este modo, las luces roja y mbar operan de manera similar
al Controlador Kratos o Centrigard
TM
. La luz roja indica que ha
habido una parada por Sobrecarga y la luz mbar indica todas
las otras condiciones de parada.
MODO DE LUZ EXTERNA: ICS Em
En este modo, las lmparas del panel operan de manera similar
a un controlador de velocidad variable ICS. La luz ROJA indica
una parada por SOBRECARGA, la luz MBAR indica una parada
por BAJA CARGA. Si la parada es originada por cualquier otra
razn, no se encender ninguna luz del panel.
CONEXIN DE LUCES DE PANEL EXTERNAS ROJA MBAR
Y VERDE
Se pueden conectar luces de panel externas y opcionales a las
tres salidas digitales suministradas en la placa. Las tres salidas
digitales correspondientes a las luces ROJA, MBAR y VERDE
estn ubicadas en el conector de la placa de control del sistema
20
(SCB) etiquetado J24. La salida digital 1 corresponde a la luz
VERDE, la salida digital 2 a la luz MBAR y la salida digital 3 a la
luz ROJA. Las tres salidas son contactos por rel de contacto
seco, normalmente abierto (N.A.) especificados para 10
Amperios a 250 Voltios.
LUCES EXTERNAS
Las tres salidas digitales (rels) del Electrospeed GCS pueden
ser reasignadas como salidas de propsito general si la funcin
de lmpara de panel no se requiere. En este caso, el parmetro
Luces Externas puede ser configurado para controlar la cantidad
de luces que se usan en el Modo de Luz Externa explicado
anteriormente. Los valores posibles son 3, 1 o ninguno. Si se
establece en 3, todos los rels se usan en el Modo de Luz
Externa. Si se establece en 1, slo el rel de la luz VERDE se
usa y los otros dos rels estn disponibles para salidas de
propsito general. Si se establece en ninguno, los tres rels
estn disponibles para salidas de propsito general. Estas
salidas de propsito general pueden utilizarse por medio de las
Funciones de Lgica Programable del Usuario que se discuten
en ese manual.
INDICACIN DE ALARMA Y PARADA
El Electrospeed GCS siempre anuncia la informacin de alarmas
y paradas activas en la pantalla de ESTATUS ("STATUS") de la
unidad de despliegue. El controlador desplegar tambin una
pantalla de alerta de alarma luego de que ocurra cualquier
parada. Esta pantalla de alerta que aparece se despliega
encima de todas las otras pantallas y muestra la hora y causa de
la parada del motor. Oprima el botn MENU o ENTER para
acusar recibo y borrar esta pantalla y volver a la pantalla
desplegada anteriormente.
CONDICIN DE BLOQUEO
Cualquiera de las alarmas de parada protectora puede ser
configurada para originar una condicin de bloqueo y esta
situacin se indica por el texto LK o LKout que acompaa a la
causa de la parada. Si tal condicin de bloqueo ha ocurrido, no
se permitir arranque de ningn tipo, manual o automtico, hasta
que la condicin de bloqueo haya sido eliminada. Una condicin
de bloqueo puede eliminarse oprimiendo el interruptor de la tecla
STOP en la unidad de Despliegue o cambiando la posicin del
interruptor de Modo HAND/OFF/AUTO, si est instalado, a
Detenido (OFF) y luego a Manual (HAND) o Automtico (AUTO).
SEGURIDAD DEL SISTEMA
El Electrospeed GCS tiene la capacidad de administrar
proteccin de seguridad para evitar la modificacin no autorizada
de valores. La seguridad es iniciada ingresando un nmero
21
cdigo o contrasea en el valor configurable Nivel 1 (Level 1) y/o
2. Si se ingresa una contrasea en cualquiera de los valores
configurables de niveles de seguridad, entonces el operador
debe ingresar la misma contrasea en la variable Contrasea de
Usuario (User Password) para que se permita cualquier cambio a
valores configurables o lecturas. Si no se logra ningn nivel de
seguridad, el operador puede leer la mayora de las pantallas de
despliegue pero no podr cambiarlas. El nivel uno de seguridad
otorgar acceso a los valores usados o cambiados ms
comnmente, tales como modificar los umbrales de alarma de
los valores de proteccin. El nivel 2 de seguridad otorga acceso
a la mayora de los otros valores configurables. El controlador se
entrega de fbrica con toda la proteccin de seguridad
desactivada, de manera que si el operador no puede cambiar
valores configurables en el campo, el personal local del campo
habr ingresado un cdigo de seguridad. Este personal local
deber entonces ser contactado para obtener el cdigo de
seguridad requerido. La pantalla de ingreso SEGURIDAD
(SECURITY) puede hallarse bajo la seccin SCADA Y SISTEMA
Y SEGURIDAD de la pantalla de grficos principal. La
contrasea de usuario se encuentra bajo la pantalla 2 de
configuracin de GCS.
RELOJ DEL SISTEMA
El Electrospeed GCS usa un circuito de reloj de tiempo real
respaldado por batera para las funciones de control de tiempo.
Todos los eventos y paradas registrados llevan la fecha y hora
de ocurrencia. Se suministra una batera con el sistema que
mantendr al reloj actualizado en el caso de una falla en el
suministro de energa o parada. El reloj del sistema puede
colocarse a la fecha y hora actuales ingresando los datos
deseados en la pantalla de men ESTABLECER TIEMPO (SET
TIME) que se encuentra como submen del men SCADA Y
SISTEMA Y SEGURIDAD. Este dispositivo de control de tiempo
cumple con los requisitos del ao 2000.
DIAGNSTICOS DE CITIBUS / AJUSTE DE CONTRASTE
La informacin de diagnsticos de CITIBus se despliega como la
mitad superior de esta pantalla. CITIBus es la marca registrada
de la conexin y comunicacin de hardware/software entre
mdulos interconectados en un sistema GCS. Esta informacin
puede usarse para diagnosticar problemas si ellos surgen. La
unidad de despliegue GCS usa un circuito de deteccin de
temperatura para ajustar automticamente el contraste de la
pantalla de grficos LCD. Si se necesita ajustar el nivel de
contraste en forma manual, use esta pantalla. Para activar esta
pantalla de ajuste, oprima las teclas con flecha IZQUIERDA y
DERECHA simultneamente, sostngalas por medio segundo,
luego suelte ambas teclas. Se desplegar una pantalla similar a
la de la izquierda. En este momento, use las teclas con flecha
ARRIBA y ABAJO para aumentar o disminuir el contraste segn
se requiera.
22
REVISIONES DE SOFTWARE
Esta pantalla despliega tambin los niveles de revisin de
software cargados en los mdulos conectados a esta unidad.
Comunquese con el personal de Centrilift si se requieren
actualizaciones de software.
DIAGNSTICOS DEL SISTEMA / AJUSTE DE CONTRASTE
Cuando se oprimen las teclas con flecha IZQUIERDA o
DERECHA mientras se est en la primera pantalla de ajuste de
contraste, se desplegar una segunda pantalla de informacin.
Esta pantalla despliega los Diagnsticos del Sistema que
muestran el nmero y tipo de inicializaciones (resets) registradas
por el microprocesador que controla las unidades as como la
temperatura de la unidad de despliegue medida en el momento.
La columna HST representa el computador principal (host)
controlador del sistema (en este caso, Hst es un Electrospeed
GCS), mientras que la columna Dsp representa la unidad de
despliegue de grficos. Se pueden realizar ajustes de contraste
tambin en esta pantalla. Una vez que los ajustes estn
completos, oprima la tecla ENTER o MENU para volver al
sistema del men GCS.
MEN DE UTILITARIOS (UTILITY MENU)
El Men de Utilitarios se activa presionando las teclas con flecha
ARRIBA y ABAJO al mismo tiempo. Aparecer una pantalla de
men similar a la de la izquierda.
Agregar Parmetro a estatus (Add Parm to status) Esta
funcin permite que el usuario reemplace uno o ambos
parmetros analgicos de la pantalla de STATUS. El valor inicial
de fbrica hace que la pantalla de STATUS despliegue el valor
actual de las entradas Analgicas Incorporadas 1 y 2. Para
reemplazar estos parmetros, primero use las teclas con flecha
para mover el cursor para resaltar el parmetro que ser movido.
Luego, active el men de Utilitarios oprimiendo las teclas con
flecha ARRIBA y ABAJO al mismo tiempo. Luego, mueva el
cursor para resaltar Agregar Parmetro a estatus y oprima
ENTER. El cursor resaltar el nmero uno en el costado derecho
de la pantalla. Oprima la tecla con flecha ARRIBA o ABAJO para
seleccionar entre las lneas de estatus 1 2. Oprima ENTER
otra vez para reemplazar la lnea del estatus seleccionado con la
nueva seleccin.
Agregar a Pantalla del Usuario (Add to Custom User) Esta
funcin permite al usuario colocar hasta 11 parmetros en la
Pantalla Personalizada del Usuario (Custom User Screen).
Primero, use las teclas con cursores para resaltar el parmetro
deseado. Luego, active el Men de Utilitario oprimiendo las
flechas ARRIBA y ABAJO al mismo tiempo. Mueva la barra
cursor para resaltar la lnea Agregar a Pantalla del Usuario, y
oprima ENTER. Use las teclas con flecha ARRIBA o ABAJO para
seleccionar la lnea (1 a 11) de la Pantalla del Usuario en la cual
este parmetro ser ubicado. Finalmente, oprima la tecla ENTER
23
otra vez para ejecutar la funcin. En la ilustracin, el valor
presente de Entrada Analgica 1 ser colocada en la lnea uno
de la Pantalla del Usuario. Note que el parmetro puede ser
tambin renombrado con una etiqueta ms descriptiva.
Captura de Pantalla (Screen Capture) La Funcin Captura de
Pantalla se usa para guardar una copia de la pantalla
actualmente desplegada en la tarjeta de memoria PCMCIA. Se
debe instalar una tarjeta de memoria vlida para usar esta
funcin. Use las teclas de cursor para desplegar la pantalla
deseada y active el Men de Utilitario. Mueva el cursor a la lnea
de men Captura de Pantalla y oprima ENTER. El nmero 0
cambiar para reflejar el nombre de archivo creado. Todos los
archivos son un mapa de bits de dos colores con nombres
asignados automticamente desde scrcap01.bmp hasta
scrcap99.bmp. La funcin de captura incrementar
automticamente el nmero en el nombre de archivo cuando
encuentre un archivo existente.
Renombrar este Parmetro (Rename this Parameter) Esta
funcin permite que el usuario renombre cualquier elemento de
dato vlido. Por ejemplo, la entrada Analgica No. 1 podra ser
renombrada a Nivel de Tanque. Se pueden usar hasta 15
caracteres en el descriptor. El primer paso es usar las teclas de
cursor para resaltar el parmetro a ser renombrado. Luego,
active el Men de Utilitario, resalte la lnea Renombrar este
Parmetro y oprima ENTER. La pantalla cambiar a una
parecida a la que se despliega a la izquierda, abajo. Use las
teclas con flecha para mover el cursor a la letra deseada y
oprima ENTER. Repita este procedimiento hasta que todas las
letras deseadas estn seleccionadas, luego mueva el cursor al
rea de GUARDAR (SAVE) en la pantalla. Oprima ENTER y el
nuevo nombre ser preservado mientras que la pantalla vuelve al
men original. Si el nombre debe ser revertido al valor original,
borre todos los caracteres personalizados en el nombre y slvelo
como un nombre vaco. El nombre del parmetro volver al
valor original.
Como se muestra en la ilustracin de la izquierda, el cursor est
actualmente sobre el carcter L minscula y el nuevo nombre
creado ser Tank Level (Nivel de Tanque). El carcter barra
inversa, \, luego de la l indica el lugar donde se colocar la
prxima letra o carcter.
24
Registrar Este Parmetro (Log This Parameter) Esta funcin
puede usarse para agregar cualquier valor de la base de datos a
la lista de valores que se registran o graban en la tarjeta de
Memoria de la PC en la unidad de despliegue. Para usar esta
funcin, primero mueva el cursor para resaltar el parmetro
deseado, luego oprima las teclas con flecha ARRIBA y ABAJO
para activar este Men de Utilitario. Luego seleccione este
rengln de men y oprima ENTER. El cursor en esta lnea
cambiar para desplegar el nmero 1. Este nmero indica en
cul de las doce posiciones posibles del registro de datos se
configurar este parmetro. Si la posicin nmero 1 ya est
asignada, seleccione otra posicin. Una vez que est
seleccionada, oprima ENTER y la pantalla volver a la ubicacin
original. El valor de dato resaltado ser agregado a la lista de
valores registrados con un tiempo de intervalo de muestra de 1
segundo y un valor de banda inactiva de 1. Si esos parmetros
no son aceptables, cmbielos usando el men de Configuracin
de REGISTRO DE DATOS (DATALOG Setup) que se describe
ms adelante en este manual.
25
LOS MENS DE GCS
La seccin a continuacin enumerar y proveer explicaciones
de todos los mens y parmetros que estn a disposicin del
usuario. El orden en que los parmetros se enumeran se basa en
comenzar con la pantalla de Men Principal (MAIN MENU) del
despliegue, como se muestra ms abajo, y luego se procede en
el sentido de las agujas del reloj a partir de Configuracin de
Electrospeed GCS (ESPEED GCS SETUP) , a lo largo del
permetro. Algunas de las pantallas de despliegue son ms
largas que lo que cabe en las 11 lneas de texto disponibles en
una pantalla. Para claridad en este manual, algunas de esas
pantallas pueden ser ilustradas ms largas que lo normal para
mostrar todos los parmetros disponibles. Para localizar la
informacin correspondiente a cualquier parmetro especfico,
use el ndice al final de este manual para localizar una palabra
clave, y luego lea la informacin en la(s) pgina(s) indicada(s).
DESCRIPCIN GENERAL DE LA ESTRUCTURA DEL MEN
DE ELECTROSPEED GCS
26
PANTALLA DE ESTADO (STATUS)
La pantalla de estado es el despliegue primario del operador.
Desde aqu, el operador puede leer la mayora de los parmetros
necesarios para determinar el estado de funcionamiento del
controlador. Como se ilustra a continuacin, la pantalla contiene
la siguiente informacin.
The motor is running at 60.9 Hz. This
will also indicate Stop or Stopping. If
acceleration is being limited by
Current or Torque demand, it will
display ILIM or TLIM
Output phase rotation = Forward
Speed Control = Frequency Setpoint
The Amp Chart graph can be
reached by pressing the ENTER key
If unit is locked out, the padlock icon,
' , is also displayed here
The output currents are 53, 53 & 54
amps, output voltage is 503 VAC
Analog input #1 measures bottom
hole pressure
Analog input #2, barrels per day of
fluid produced
The most recent shutdown was
caused by an Overload Lockout
condition on November 25, 2003 at
1:42:06 PM local time
The controller is detecting an
Underload alarm condition and is
waiting for the time delay to expire
before it shuts down the motor.
Use the arrow keys to move the
cursor, then press ENTER to edit
the parameters Set Hz., Rotation
and Mode or view the AmpChart.
Use the Utility Menu to assign two
different parameters to this area of
the screen and/or to rename them
When the motor is running, this bar graph
illustrates the amount of current relative to the
overload setpoint, the right end of the bar.
The tick represents the underload setpoint.
27
CONFIGURACIN DE ESPEED
GCS (ESPEED GCS SETUP)
Cuando se mueve el cursor a la posicin superior central de la
pantalla de Men Principal, y se oprime la tecla ENTER, aparece
la primera de las cuatro pantallas de CONFIGURACIN DEL
CONTROLADOR GCS (GCS DRIVE SETUP). Estas pantallas
renen a la mayora de los parmetros necesarios para arrancar
y hacer funcionar el controlador Electrospeed GCS. Para
desplegar otra pantalla, oprima la tecla con flecha izquierda o
derecha. Para modificar un parmetro, use las teclas con flecha
para mover la barra de cursor sobre cualquier rengln de men
como se muestra abajo a la izquierda y oprima la tecla ENTER.
El GCS entrar en modo modificar y permitir cambios al valor
de ese parmetro. Las cuatro pantallas disponibles dentro de
este grupo son CONFIGURACIN DE GCS 1 (GCS SETUP 1) ,
CONFIGURACIN DE GCS 2, CONFIGURACIN DE GCS 3 y
ARRANQUES (STARTS). Se rev cada una a continuacin.
CONFIGURACIN 1 DEL GCS (GCS SETUP 1)
Frecuencia Establecida (Set Frequency) Controla la
frecuencia de salida del controlador de velocidad variable
mientras opera en modo Control de Valor de Frecuencia. La
frecuencia de salida se puede ajustar en incrementos de 0.1 Hz.
entre los valores de Bloqueo de Baja Velocidad (Low Speed
Clamp) y Bloqueo de Alta Velocidad (High Speed Clamp). La
velocidad de operacin est limitada tambin por el valor lmite
actual, Lmite de Corriente de Operacin (Run ILimit) .
Bloqueo de Alta Velocidad (High Speed Clamp) Establece la
frecuencia mxima a la cual se permite operar al Electrospeed
GCS y se la puede programar entre 10 y 120 Hz. No se debera
permitir que la frecuencia de operacin mxima exceda la
velocidad de operacin mxima para el equipo operado, de
acuerdo a la recomendacin del fabricante. La operacin de
equipos rotativos por encima de las velocidades mximas
especificadas puede resultar en daos a los equipos y lesiones al
personal.
Bloqueo de Baja Velocidad (Low Speed Clamp) El Bloqueo
de Baja velocidad establece la frecuencia de operacin mnima y
se la puede programar entre 10 y 110 Hertz. Para motores
sumergibles, el valor de Bloqueo de Baja Velocidad no deber
ser programado por debajo de la velocidad que suministra caudal
adecuado de fluido a travs del motor para refrigeracin
apropiada. El flujo de aire de refrigeracin en motores
convencionales decrece tambin con la velocidad creando
problemas potenciales de refrigeracin, especialmente en
aplicaciones de momento de torsin (torque) constante donde se
necesitan altas corrientes de entrada a bajas velocidades. La
velocidad de operacin mnima debera basarse en las
recomendaciones del fabricante del motor.
28
Lmite de Corriente de Operacin (Run ILimit) El Lmite de
Corriente de Operacin controla la corriente de salida mxima
que el controlador enviar al motor o carga durante la operacin
normal. Este lmite se puede ajustar entre 0 y 150% de la
corriente de salida especificada del controlador. El Lmite de
Corriente de Operacin no tiene efecto durante la Demora de
Sincronizacin (Sync Delay). Si el controlador est operando en
el Lmite de Corriente de Operacin, la frecuencia de salida
cambiar dentro del rango de Bloqueo de Alta Velocidad y la
velocidad mnima para mantener la corriente de salida en el valor
del Lmite de Corriente de Operacin.
Con frecuencia se usa el Lmite de Corriente de Operacin en
aplicaciones de bombas sumergibles para limitar la corriente de
entrada del motor a su valor de placa. Cuando la bomba ingiere
gas, la carga decrecer, permitiendo una operacin a mayor
frecuencia con corriente en el valor de Lmite de Corriente. Las
mayores velocidades ayudarn a forzar el gas a travs de la
bomba; en ese momento la carga aumentar, y la frecuencia
disminuir.
Lmite de Corriente de Sincronizacin (Sync ILimit) El Lmite
de Corriente de Demora de Sincronizacin establece la corriente
mxima de salida que se produce durante una Demora de
Sincronizacin, y se la puede ajustar desde 0 a 150% de la
corriente de salida especificada del controlador. Un buen valor
inicial para este Lmite de Sincronizacin sera el 150% de la
corriente de placa del motor. Si se usa un transformador de
salida, al igual que con las bombas sumergibles, configure este
parmetro al 150% de la corriente del motor multiplicada por la
proporcin del transformador (voltaje de salida dividido por el
voltaje de entrada).
Voltios a 60 Hz (Volts at 60 Hz) El parmetro Voltios a 60 Hz
establece la proporcin de voltaje a frecuencia. Este valor
determina el voltaje producido por el controlador cuando la
frecuencia de salida llega a 60 Hz. El valor tpico para motores
de superficie sera el voltaje de placa para 60 Hz. Si el voltaje de
placa del motor es para 50 Hz. multiplquelo por 1,2 para llegar al
voltaje apropiado para operacin a 60 Hz. Cuando se usa un
transformador de salida, como con un motor sumergible, divida el
voltaje de placa por la proporcin del transformador (voltaje de
entrada / voltaje de salida). Si la especificacin es para 50 Hz.,
multiplique por 1,2 como anteriormente. En algunos casos, el
parmetro "Voltios a 60 Hz" exceder la especificacin de 480
voltios del controlador, sin embargo, ste slo establece la
proporcin voltaje a frecuencia, y la salida del controlador no
exceder sus especificaciones. Los motores exhiben la
caracterstica de tener un punto de corriente mnima, establecido
por el voltaje y la carga. El parmetro de Voltios a 60 Hz puede
ajustarse mientras el sistema est operando para determinar el
punto de corriente mnima. Aumente o disminuya el valor de
Voltios a 60 Hz unos pocos voltios por vez, mientras monitorea la
corriente y determine as el punto de corriente mnima.
29
Voltaje Mximo (VClamp) Este parmetro establece el voltaje
de salida mximo que ser producido por el controlador a
cualquier frecuencia y determina el momento en que el
controlador comienza la operacin a caballos de fuerza
constante. El Voltaje Mximo puede ajustarse de 100 a 550 VCA.
El valor tpico sera de 480VCA para entrada de 460/480VCA o
400 VCA para 380/400. El voltaje de salida mximo obtenible
ser aproximadamente 5% mayor que el voltaje de entrada, pero
no puede exceder 550 VCA.
Refuerzo de Voltaje (VBoost) El Refuerzo de Voltaje controla
el voltaje de desplazamiento agregado al nivel de voltaje a
velocidad cero que es normalmente cero voltios. A bajas
frecuencias es a veces deseable aumentar el voltaje de salida
por encima del voltaje de base normal puesto que la porcin
resistiva de la impedancia del motor se hace ms significativa
cuando se la compara con la porcin reactiva. Esto puede limitar
la corriente de excitacin del motor, reduciendo el momento de
torsin a bajas velocidades. Al agregar el Refuerzo de Voltaje, se
puede mejorar el rendimiento a baja velocidad y se puede
compensar tambin por el efecto de cada de voltaje por cable de
salida y/o transformador, que ser tambin ms pronunciado a
bajas frecuencias. La proporcin de voltios por hertz es entonces
ajustada automticamente para disminuir el efecto de Refuerzo
de Voltaje linealmente con la velocidad, de manera tal que a
mxima velocidad el efecto es cero. El Refuerzo de Voltaje no
est activo durante la Demora por Sincronizacin. La
configuracin inicial debera realizarse usualmente sin ningn
Refuerzo de Voltaje, y debera luego ser aumentado segn sea
necesario. Generalmente el Refuerzo de Voltaje no se usa con
cargas de momento de torsin variable, puesto que la carga del
motor disminuye tan dramticamente con la velocidad. La
disminucin efectiva en el voltaje que sucede puede incluso
mejorar la eficiencia del motor con baja carga. Las cargas a
momento de torsin constante, sin embargo, requieren momento
mximo an a bajas velocidades, haciendo que el uso del
Refuerzo de Voltaje sea necesario en esas aplicaciones. Una
manera para determinar el valor apropiado del refuerzo de voltaje
en una aplicacin de momento de torsin constante sera operar
el controlador a velocidad mnima, y ajustar el Refuerzo de
Voltaje para obtener corriente mnima, similar a la tcnica
descrita en la seccin Voltios a 60 Hz.
Refuerzo de Voltaje En Sincronizacin (VBoost Sync) El
Refuerzo de Voltaje En Sincronizacin controla el voltaje
agregado al voltaje de base a la frecuencia de arranque. El
Refuerzo de Voltaje En Sincronizacin realiza la misma funcin
bsica que el Refuerzo de Voltaje, pero est presente slo
durante el arranque, para compensar en forma apropiada por la
mayor cada de voltaje en el cable asociada con las corrientes de
arranque. El Refuerzo de Voltaje En Sincronizacin debera
establecerse en cero para el arranque inicial y aumentarse slo
si se encuentran dificultades en el arranque. La corriente de
salida debera ser monitoreada durante los intentos iniciales de
arranque para determinar la corriente de salida mxima enviada
en el evento que el arranque no tenga xito. Si la corriente de
30
salida no alcanza el valor de Lmite de Sincronizacin (ILimit
Sync) eso indica que se podra aumentar la corriente de salida
aumentando el Refuerzo de Voltaje durante Sincronizacin. Este
valor se puede ajustar de 0 a 200 VCA.
Frecuencia de Sincronizacin (Sync Frequency) La
Frecuencia de Sincronizacin establece la frecuencia de salida
en Hz, que el controlador usar para arrancar el motor. Como se
muestra a la izquierda, cuando el sistema se arranca, el
controlador aumentar hasta el valor de Frecuencia de
Sincronizacin. La salida se mantendr en la Frecuencia de
Sincronizacin durante un perodo de tiempo denominado la
Demora de Sincronizacin (Sync Delay). La Demora de
Sincronizacin permite que el motor acelere a la frecuencia de
arranque. Al final de la Demora de Sincronizacin, el controlador
acelerar el motor a la frecuencia de operacin preestablecida.
La Frecuencia de Sincronizacin debera ser tan baja como sea
prctico para la aplicacin. Los valores usuales seran de 10 a 12
Hertz para motores sumergibles y de 3 a 5 Hz para motores de
superficie. El momento de torsin de arranque de motor
disponible es directamente proporcional al cuadrado de la
corriente de arranque, e inversamente proporcional a la
frecuencia de arranque. Esto muestra que el primer criterio para
arranque exitoso es poder entregar la mxima corriente
disponible al motor, y el segundo criterio es arrancar a la
frecuencia ms baja posible.
Demora de Sincronizacin (Sync Delay) La Demora de
Sincronizacin establece el tiempo en segundos que el
controlador permitir que el motor acelere a la velocidad de
arranque establecida por Frecuencia de Sincronizacin. La
Demora de Sincronizacin se puede ajustar de 0 a 9999
segundos. Los valores usuales para instalaciones sumergibles
son de 2 a 5 segundos. Los motores de superficie requieren ms
tiempo debido a la mayor inercia y por lo tanto se define esta
demora usualmente de 5 a 10 segundos. Al final de la Demora
de Sincronizacin el controlador acelerar el motor a la taza de
Tiempo de Aceleracin, o seguir la aceleracin del motor
limitada por el Lmite de Corriente de Operacin (Run ILimit), a la
frecuencia preestablecida. Si la Demora de Sincronizacin es
demasiado corta, quizs el motor no arranque. Si esto sucede, el
controlador se detendr usualmente en sobrecarga. Como
proteccin adicional, el Electrospeed GCS se detendr en un
salto por Baja Velocidad si est operando en el Lmite de
Corriente de Operacin, debajo del Bloqueo de Baja Velocidad, y
la salida de frecuencia no est aumentando. Esto ofrece medios
positivos para detectar un motor detenido.
CONFIGURACIN 2 DEL GCS (GCS SETUP 2)
Se accede al men CONFIGURACIN DE GCS 2 desde la
pantalla CONFIGURACIN DE GCS 1 oprimiendo la tecla de
flecha a la derecha una vez.
Tiempo de Aceleracin (Accel Time) Establece el tiempo
requerido para que el controlador aumente su frecuencia de
31
salida en 60Hz y se puede ajustar de 2 a 200 segundos. La
aceleracin no comienza hasta que la demora de sincronizacin
haya expirado. Para determinar la tasa real (Hz. /seg.), divida 60
por el tiempo definido en segundos. La aceleracin del motor
estar limitada por este valor si se permite que el controlador
suministre suficiente corriente para mantener la tasa, de otro
modo la tasa de aceleracin estar limitada por la corriente
disponible (ILimit). Cuando se opera en el modo de control de
valor, el Tiempo de Aceleracin deber establecerse en el valor
mnimo, 2 segundos, para permitir que la respuesta del
controlador sea regulada por el algoritmo de control de valor.
Tiempo de Desaceleracin (Decel Time) El Tiempo de
Desaceleracin establece el tiempo que el controlador requiere
para reducir su frecuencia de salida en 60Hz y se puede ajustar
de 2 a 200 segundos. Para determinar la tasa real (Hz. /seg.),
divida 60 por el tiempo definido en segundos. Si el controlador
est operando una carga de alta inercia, la tasa de
desaceleracin puede estar limitada por la inercia del motor y de
la carga. Bajo estas condiciones, la tasa de desaceleracin
seguir el tiempo de desaceleracin del motor. Cuando se opera
en el modo de control de valor, el Tiempo de Desaceleracin
deber establecerse en el valor mnimo, 2 segundos, para
permitir que la respuesta del controlador sea regulada por el
algoritmo de control de valor.
Modo de Inversor (Inverter Mode) Establece el tipo de forma
de onda de salida que ser producida por el controlador GCS.
(Cuando se va a usar salida HYB o PWM con bombas
sumergibles es necesario utilizar un filtro de salida PWM
(Modulacin de Ancho de Pulso) para evitar daos a los equipos
conectados. Refirase al manual del controlador de Filtro PWM
para informacin adicional).
Hay tres modos posibles de salida de inversor:
ESP El modo ESP produce una onda de forma pseudo
sinusoidal que tiene seis transiciones de voltaje (salida
de 6 pasos) en la seal de salida recreada.
HYB El modo PWM Hbrido crea una forma de onda de
salida de voltaje variable y ancho de pulso modulado que
puede ser til en algunas aplicaciones para reducir los
armnicos de corriente al motor. El modo PWM Hbrido
puede reducir tambin las tensiones por voltaje pico de
cable bajo algunas circunstancias.
PWM El modo PWM es una forma de onda estndar de
voltaje de bus pleno y de modulacin de ancho de pulso.
Esta salida tiene sus mejores aplicaciones en motores de
superficie donde no se use un transformador elevador y
el cable de energa del controlador al motor sea
relativamente corto.
Rotacin de Inversor (Inverter Rotation) Controla la direccin
de la rotacin de fase de salida del controlador. Las opciones son
32
hacia delante (FWD) y en reversa (REV). Esta rotacin est
definida por la secuencia de rotacin de fase de los tres voltajes
o corrientes de salida, ABC (hacia delante) o CBA (en reversa).
Modo de Control (Control Mode) El Modo de Control
selecciona qu tipo de algoritmo de control gobernar la salida
del controlador. Hay tres modos disponibles:
FR SET El modo de Frecuencia Establecida hace que
el Electrospeed GCS intente operar a la Frecuencia
Establecida programada por el usuario, a la cual se
accede en el grupo del men Configuracin de GCS 1.
Note que varios factores pueden afectar la capacidad del
controlador para alcanzar esta frecuencia incluyendo
Lmite de Corriente, Bloqueo de Alta Velocidad y Bloqueo
de Baja Velocidad.
AN FOL En modo Seguidor Analgico, el controlador
intentar variar su frecuencia de salida entre el Bloqueo
de Baja Velocidad y el Bloqueo de Alta Velocidad en
proporcin al 0 100% de la seal de entrada analgica
seleccionada. Los parmetros que afectan este mtodo
de control se encuentran en el grupo de men Funcin
de Lgica Programable.
PID En modo PID, el controlador intentar variar su
frecuencia de salida de manera de mantener una seal
de entrada analgica establecida. Los parmetros que
afectan este algoritmo de control de circuito cerrado se
encuentran en el grupo de men Funcin de Lgica
Programable.
Ganancia de Regulador (Regulator Gain) Controla la
respuesta del circuito de control de voltaje del bus a los cambios
en el voltaje de entrada, carga y frecuencia de salida. La
Ganancia de Regulador se puede ajustar de 0 a 100%, con un
valor inicial de fbrica del 55%. El aumento de la ganancia de
regulador acelera la respuesta del regulador y puede usarse para
compensar inestabilidades del sistema de energa. Cuando se
opera sin carga, la ganancia debera establecerse en 50% o ms
para obtener un voltaje de salida estable.
Compensacin de Deslizamiento (Slip Comp) La
compensacin de deslizamiento suministra correccin de
velocidad de salida proporcional a la corriente de salida que
aumenta la frecuencia del inversor y la salida de voltaje para
contrarrestar el deslizamiento del motor de induccin con la
carga. La compensacin de deslizamiento debera establecerse
igual al valor de deslizamiento de carga total (en porcentaje) para
el motor y puede ajustarse de 0 a 7,0 % en incrementos de 0,1%.
Se usa primariamente cuando se requiere control preciso de la
velocidad del motor bajo condiciones de carga muy variable.
Frecuencia de Trote (Jog Freq) Frecuencia de Trote es un
valor de frecuencia que es activado por la entrada de Trote.
Mientras la entrada de Trote est activa, el controlador procesar
33
una secuencia de arranque normal y acelerar la frecuencia de
salida hasta el valor de la frecuencia de trote. El controlador
operar a esta frecuencia de trote mientras la entrada de trote
est activa. Cuando la entrada de Trote sea desactivada, el
controlador desacelerar hasta una parada controlada. (Nota:
Esta funcin no est disponible actualmente)
Configuracin de Frecuencias a Evitar (Freq Avoid Cfg)
Configuracin de Frecuencias a Evitar provee acceso a una tabla
programable por el usuario de cinco frecuencias de salida a las
cuales el controlador no tiene permitido operar. Oprima el botn
ENTER mientras resalta este rengln del men para acceder a la
tabla de valores.
Frecuencias a Evitar (Freq Avoidance) Esta tabla permite al
usuario especificar cinco frecuencias individuales que el
controlador no producir. Cada frecuencia ingresada tiene un
valor de banda inactiva asociado. Este valor de banda inactiva
indica al controlador qu tan cerca de la frecuencia de salida
puede operar. Como se ilustra a la izquierda, la primera
frecuencia a evitar ha sido definida en 9.5 hertz con una banda
inactiva de 1.0 hertz. Esto significa que el Electrospeed GCS no
permitir operacin de rgimen dentro del rango de 8.5 a 10.5
Hz. El controlador producir esas frecuencias slo mientras est
moviendo su salida de un lado del rango prohibido al otro. Estos
valores pueden usarse para prevenir vibraciones no deseadas
que pueden generarse como resultado de la resonancia del
equipo a frecuencias especficas.
Modelo del Controlador (Drive Mdl Num) Este rengln
despliega el Modelo del Controlador. El modelo base de cada
Electrospeed GCS est guardado en memoria en el Panel de
Control del Sistema, junto con los lmites superior e inferior de los
parmetros afectados por las especificaciones del controlador.
Cada vez que se energiza el controlador, ste recuperar el
nmero de modelo y los lmites asociados de memoria. Este
nmero de modelo debera coincidir con el nmero de modelo
estampado en la placa adosada a la parte exterior del gabinete
del controlador.
Especificacin de Momento de Torsin (Torque Rating) La
Especificacin de Momento de Torsin (torque) indica el tipo de
momento de torsin que producir el controlador, ya sea
constante (CT) o variable (VT). Los modelos bsicos de
controlador Electrospeed GCS estn configurados para cargas
con momento de torsin variable. Comunquese con personal de
servicio de Centrilift para convertir a un valor de momento de
torsin constante. Esto disminuir la corriente de salida y los
valores de kilo voltio-amperio (KVA) en un 20%, pero las
corrientes de sobrecarga y de arranque permanecern
constantes.
Voltios Monofsicos (Single Vlts) Este parmetro configura
el controlador Electrospeed para operar de una fuente de poder
monofsica en lugar de la fuente trifsica usual. La energa de
entrada debe estar conectada a las terminales de entrada A y B.
34
Las alarmas de monitoreo de voltaje de entrada se reconfiguran
para monitorear solamente la fase nica del voltaje, y la alarma
de Desbalance de Voltaje se desactiva. La salida de energa
trifsica del controlador se disminuye en 2/3 para reflejar la
menor energa de entrada disponible. Esta configuracin puede
ser muy til para impulsar motores pequeos trifsicos cuando
hay disponible slo energa monofsica.
Contrasea del Usuario (User Password) Este parmetro
permite el ingreso de la contrasea del operador. Cuando la
seguridad del sistema ha sido habilitada, el operador debe
ingresar la contrasea correcta en esta ubicacin antes de que
se le permita modificar cualquier otro valor configurable o
parmetro. Lea la seccin SEGURIDAD DEL SISTEMA para ms
informacin sobre el trabajo con contraseas de seguridad.
CONFIGURACIN 3 DEL GCS (GCS SETUP 3)
Comenzando con la versin SYS6v300 del Software de Control
del Sistema y GDI4V74, el sistema operativo GCS reconocer
cuando el software del Mdulo de Conversin de Energa
PCM8r00 o mayor est presente. Esto har que una tercera
pantalla de configuracin sea visible. Cuando la
CONFIGURACIN DE GCS 3 est visible, los parmetros
adicionales permiten que el controlador opere en el modo
Control de Momento de Torsin. En este modo, el controlador
calcula en forma continua el momento de torsin desarrollado por
el motor y las revoluciones del vstago en base a los parmetros
establecidos por el operador y desplegar estos valores as
como el momento de torsin del vstago de la bomba y las
revoluciones por minuto si son diferentes. Tambin limitar la
frecuencia de salida, el voltaje y la corriente en base al valor de
Lmite de Corriente (ILimit) (CONFIGURACIN DE GCS 2) o el
Lmite de Momento de Torsin (TLimit) dependiendo de cul
encuentre primero. NOTA: Este software puede usarse como en
versiones previas sin los parmetros de control de momento de
torsin. Sin embargo, para hacer esto, la Corriente de Placa del
Motor y la Corriente de Magnetizacin del Motor deben
establecerse correctamente y el Lmite de Momento de Torsin
debe establecerse en el mximo. Se describen los renglones de
esta pantalla a continuacin.
Revoluciones del Motor (Motor RPM) Revoluciones por
minuto reales del vstago del motor. Este rengln no es
modificable.
Momento de Torsin del Motor (Motor Torque) Momento de
torsin actual desarrollado por el vstago del motor como un
porcentaje del momento de torsin total especificado del motor.
Este rengln no es modificable.
Revoluciones de la Bomba (Pump RPM) Revoluciones por
minuto del vstago de la bomba. Este nmero se calcula en base
a la Proporcin de Engranajes establecido como otro parmetro
de esta pantalla. Si la proporcin de engranaje es 1:1 estas
35
revoluciones sern iguales a las revoluciones del motor. No es
modificable.
Momento de Torsin de la Bomba (Pump Torque) El
Momento de Torsin del Vstago de la Bomba es un valor
calculado dependiendo de la Proporcin de Engranajes y puede
o no ser distinto al Momento de Torsin del Motor. No es
modificable.
Lmite de Momento de Torsin (Torque Limit) Este es el
porcentaje de momento de torsin lmite permitido por el
controlador. Su rango es de 0 a 150% y es un lmite dominante
similar al Lmite de Corriente. En otras palabras, este lmite
tendr precedencia sobre todos los otros parmetros operativos
y no ser excedido. El controlador compara en forma continua el
momento de torsin actual con el valor del Lmite de Momento de
Torsin y la corriente de salida actual con el valor de Lmite de
Corriente. Una vez que se llega a cualquiera de los lmites, el
controlador ajustar el voltaje de salida y la frecuencia segn sea
necesario para no exceder los lmites.
Corriente de Placa de Motor (Motor Nmplt Cur) Corriente de
Placa de Motor multiplicada por la proporcin del Transformador.
Puesto que el controlador no monitorea la corriente real en el
fondo de pozo, este parmetro debera ser establecido en la
corriente de salida del controlador esperada cuando el motor
est operando a la carga y velocidad de rgimen. Si se utiliza un
transformador elevador o reductor entre el controlador y el motor,
use la corriente de placa del motor multiplicada por la proporcin
del transformador para determinar este valor.
Corriente de Magnetizacin de Motor (Motor Mag Cur) Este
parmetro es la corriente esperada del motor sin carga
multiplicada por la proporcin del transformador
elevador/reductor. El valor original de fbrica es 30% del valor de
placa del controlador. El valor actual de corriente de motor usada
puede determinarse a partir de las especificaciones del
fabricante del motor, o medida con el vstago del motor
desconectado de la carga. Si ninguna de estas opciones est
disponible, usando el 30% de la corriente de placa del motor
resultar en valores aproximados correctos de momento de
torsin y revoluciones por minuto. Recuerde multiplicar la
corriente del motor por la proporcin del transformador, cuando
se utilice uno.
Revoluciones de Placa del Motor (Motor Rated RPM) Este
nmero se determina directamente de la placa del motor y
representa el nmero mximo de revoluciones por minuto del
motor.
Momento de Torsin de Placa del Motor (Motor Rated Trq)
Momento de torsin de placa del motor. El valor ingresado en
este parmetro deber venir directamente de la placa del motor.
Si la placa especifica slo los caballos de fuerza del motor, se
puede calcular el momento de torsin con la ecuacin:
36
Momento de torsin (pie-libras) = (Caballos de fuerza X 5252) /
Revoluciones por minuto de placa
Nmero de Polos del Motor (Num Of Mtr Pls) El usuario
deber especificar este parmetro como 2, 4 6 dependiendo de
la informacin del fabricante que se encuentra en la placa del
motor.
Proporcin de Engranaje (Gear Ratio) Proporcin de
reduccin de engranaje (o polea). En algunas instalaciones, se
usa una caja de engranajes para reducir las revoluciones del
motor a un nmero menor de revoluciones para la bomba. El
valor original de 1,00 indica que no se usa reduccin de
velocidad.
ARRANQUES (STARTS)
El men de ARRANQUE DEL CONTROLADOR GCS (GCS
DRIVE STARTS) se accede desde las pantallas
CONFIGURACIN DE GCS 1, 2 3 oprimiendo la tecla con
flecha derecha o izquierda hasta que se despliegue la pantalla
que se muestra a la izquierda.
Arranque Automtico Interno (Int Auto Rstrt) Este parmetro
Arranque Interno controla si el controlador arrancar
automticamente el motor luego de que se haya detenido y si no
est bloqueado. Este parmetro se usa en caso de ausencia de
un interruptor montado externamente Manual-Detenido-
Automtico (HAND-OFF-AUTO en ingls, o HOA) y es
reemplazado por la posicin del interruptor HOA cuando hay uno
instalado y activo.
Contador de Arranques (Strts Counter) El Contador de
Arranques despliega el nmero de veces que el controlador ha
arrancado el motor en forma automtica. Este contador se usa
en conjunto con los valores Mximo de Arranques Permitidos y
Demora para Restaurar Contador de Arranques descritos a
continuacin para limitar y controlar el nmero de veces que el
controlador arrancar el motor antes de asumir una condicin de
bloqueo y evitar intentos adicionales de arranque. Se puede
eliminar la condicin de bloqueo oprimiendo el interruptor STOP
del teclado o moviendo el interruptor HOA a la posicin Detenido
(OFF) y nuevamente a Automtico (AUTO) o Manual (HAND).
Total de Arranques (Total Starts) El Total de Arranques
registra el nmero de veces que el controlador y el motor han
sido arrancados desde el ltimo comando de restauracin a
valores de fbrica.
Mximo de Arranques Permitidos (Max Alowd Strts) El
Mximo de Arranques Permitidos controla el nmero de
arranques automticos que el controlador intentar antes de
generar una condicin de bloqueo. Si el controlador intenta esta
cantidad de arranques y el motor no funciona por un mnimo de
tiempo definido en el parmetro Demora de Restauracin de
Contador de Arranques, el controlador asumir entonces una
37
condicin de bloqueo y evitar intentos de arranques posteriores
hasta que se elimine el bloqueo. Se puede eliminar una
condicin de bloqueo oprimiendo el interruptor STOP del teclado
o moviendo el interruptor HOA a la posicin Detenido (OFF) y
luego a Automtico (AUTO) o Manual (HAND). El parmetro de
arranques mximos se usa para todos los intentos de arranque,
a menos que se activen los Parmetros Auxiliares de Arranques
para esa causa de parada especfica.
Demora para Restauracin de Contador de Arranques (Strts
Cntr Rst) Este parmetro controla el tiempo, en minutos, que el
controlador/ motor deben funcionar antes que el controlador
restaure el contador de arranques automticos y permita que
vuelvan a ocurrir el nmero total de intentos de arranque.
Cuando esta demora ha expirado y el CONTADOR DE
ARRANQUES se restaura a cero, el controlador puede intentar
otra vez tantos arranques automticos como permita el
parmetro Mximo de Arranques Permitidos. Por ejemplo, si el
motor ha sido arrancado y se ha detenido antes de la demora
original de fbrica de 60 minutos, el controlador registrar 1
arranque automtico. Si el motor se arranca otra vez y se detiene
otra vez antes de funcionar durante 60 minutos, el controlador
mostrar entonces 2 intentos de arranque automtico. Si esta
situacin se repite otra vez, el controlador registrar el tercer
intento de arranque automtico y generar una condicin de
bloqueo. Esta condicin de bloqueo evitar todo intento
subsiguiente de arranque hasta que el bloqueo haya sido
eliminado. Esta demora es usada tambin por el parmetro
Demora Progresiva de Arranque a continuacin.
Demora Progresiva de Arranque (Prog Rstrt Tm) La Demora
Progresiva de Arranque brinda un mtodo de aumentar
automticamente la demora de tiempo de arranque que el
controlador espera antes de arrancar el motor. Cuando este
parmetro se establece en un valor distinto de cero, el nmero
de minutos especificado se sumar a la demora de arranque
usada para posponer un arranque automtico. En esta situacin,
el controlador usar la demora de arranque estndar para el
primer perodo de arranque y luego agregar la demora
progresiva de arranque al segundo y a los intentos de arranque
subsiguientes. Para evitar una demora de arranque en continuo
crecimiento, el valor de la demora progresiva de arranque
revertir a cero cuando el tiempo de funcionamiento del motor
haya excedido la Demora de Restauracin de Contador de
Arranques previamente detallado.
Demora de Arranque (Restart Delay) La Demora de Arranque
establece la cantidad de minutos que el controlador esperar
luego de una parada, antes de intentar un arranque automtico
del motor. Si es necesario, el motor puede ser arrancado
inmediatamente oprimiendo el botn de teclado arrancar (start) o
el interruptor de arranque montado en el panel si el panel est
equipado con uno. En todos los casos, el controlador intentar
arrancar la bomba slo si no hay alarmas activas y si el valor
Esperar Tiempo de Arranque (Wait For Restart Timer) est
desactivado. La Demora de Arranque puede ser afectada
38
automticamente por el valor Demora Progresiva de Arranque
detallado previamente. Si los Parmetros Auxiliares de Arranque
para la causa de la ltima parada estn habilitados, el
controlador usar esos valores especficos para la demora de
arranque y el nmero de intentos de arranque.
Tiempo Hasta Arranque (Tm Til Rstrt) El Tiempo Hasta
Arranque despliega el nmero de minutos y segundos que
quedan hasta que el controlador intente arrancar el motor. Si
este valor despliega cero y el controlador no est funcionando,
podra haber alarmas activas, o el arranque podra ser evitado
porque el botn STOP del teclado fue oprimido, el interruptor
externo de modo HOA est en la posicin Manual (HAND) o
Detenido (OFF), un comando de control de parada de telemetra
est activo o el parmetro Arranque Automtico Interno est en
NO.
Tiempo de Arranque Escalonado (Stagrd Strt Tm) El Tiempo
de Arranque Escalonado provee un medio de establecer una
demora de arranque especfica para cada controlador. Luego de
una falla de suministro energtico, todos los controladores
esperarn un perodo de tiempo igual a la Demora de Arranque
ms esta demora de arranque escalonado. El desplazar los
tiempos individuales de arranque de esta manera puede ayudar
a evitar cada de voltaje en el suministro de energa ocasionado
cuando muchos motores comienzan al mismo tiempo.
Esperar Tiempo de Arranque (Wait Fr Rstrt T) Esperar
Tiempo de Arranque fuerza al controlador a esperar hasta que la
demora de arranque expire antes de permitir cualquier tipo de
arranque, ya sea manual o automtico. Para arrancar
inmediatamente en caso de emergencia, cambie este parmetro
a NO y luego arranque el controlador. Asegrese de volver este
valor a S (YES) si se desea evitar arranques durante la demora
de arranque. El controlador nunca intentar arrancar el motor si
hay alarmas activas.
Arrancar con Sobrecarga (Rstrt on Ovld) Arrancar con
Sobrecarga define los Parmetros Auxiliares de Arranque de
Sobrecarga (ARPs) para permitir que el controlador intente un
arranque automtico del motor luego de una parada por
Sobrecarga. Todos los Parmetros Auxiliares de Arranque se
pueden acceder desde cada pantalla individual de configuracin
de fallas y alarmas. Refirase a las secciones de fallas y alarmas
de este manual para ms detalles.
39
REGISTRO E HISTORIA
(DATALOG & HISTORY)
El grupo de pantallas REGISTRO e HISTORIA (DATALOG and
HISTORY) provee acceso a la historia registrada guardada
dentro del Electrospeed GCS. Este grupo de pantallas incluye
HISTORIA DE PARADAS (SHUTDOWN HISTORY),
REGISTROS DE EVENTOS (EVENT RECORDS), HISTORIA DE
FUNCIONAMIENTO (RUN HISTORY), y REGISTRO DE DATOS
EN TARJETA DE PC Y GRFICOS (PC CARD DATA LOGGING
AND GRAPHING). Se incluyen tambin en esta seccin
pantallas para acceder funciones de archivo/directorio de
Tarjetas de PC y un nombre de sitio ingresado por el usuario y
un rea de notas.
HISTORIA DE PARADAS (SHUTDOWN HISTORY)
La Historia de Paradas despliega la causa, hora y fecha de las
ltimas noventa y nueve paradas. La pantalla contiene once
registros a la vez. Para leer cualquier otra historia de paradas,
oprimir la tecla con flecha abajo para mover el cursor al fondo de
la pantalla y ms all, desplazndose a travs de todos los
registros disponibles. Los nombres de las causas de paradas
estn con frecuencia abreviados, de manera que si se requiere
una explicacin, el rea al final de la pantalla despliega una
versin expandida de la causa.
DETALLE DE PARADAS (SHUTDOWN DETAIL)
La pantalla de Detalle de Parada (Shutdown Detail) se despliega
cuando se oprime la tecla ENTER mientras el cursor resalta un
registro de historia de parada. Este registro contiene el valor de
las tres lecturas de corriente y voltaje y las dos lecturas de
entrada analgica en el momento de que la parada
correspondiente ocurriera. Estos datos pueden ser tiles para
diagnosticar aplicaciones con problemas.
40
REGISTROS DE EVENTOS (EVENT RECORDS)
La pantalla de REGISTROS DE EVENTOS despliega los 254
eventos ms recientes que han ocurrido desde que el controlador
ha sido instalado y puesto en marcha. Cuando la memoria
temporaria de eventos se haya llenado, el controlador comenzar
a grabar sobre los registros ms viejos con la ltima informacin
de eventos. Cada entrada numerada en la lista de eventos est
seguida por una abreviatura de tres letras que indica el tipo de
evento, el cual es a su vez seguido por la descripcin del valor
de base de datos que ocasion o fue afectado por el evento. Al
final de la pantalla se despliegan tres lneas de informacin que
muestran: el tipo de evento (sin abreviar), la hora y fecha de la
ocurrencia, y en el caso de un cambio de valor de configuracin,
los valores antes y despus para ese valor de configuracin. Use
las teclas con flecha ARRIBA / ABAJO para mover el cursor
hacia arriba y abajo para resaltar los distintos eventos y leer su
informacin al fondo de la pantalla. Para mover el cursor
rpidamente de un extremo al otro de la lista, oprima la tecla
ENTER.
HISTORIA DE FUNCIONAMIENTO (RUN HISTORY)
La pantalla HISTORIA DE FUNCIONAMIENTO despliega
contadores y relojes que registran diversa informacin operativa
sobre la instalacin. Para acceder a HISTORIA DE
FUNCIONAMIENTO oprima la tecla con flecha a la derecha
desde la pantalla REGISTROS DE EVENTOS.
Tiempo de Funcionamiento (Run Time) (das) Este reloj
registra el nmero total de das de 24 horas que el motor ha
funcionado desde la ltima vez que fue arrancado.
Tiempo de Funcionamiento (Run Time) Este reloj registra las
horas, minutos, y segundos (HMS) que el motor ha funcionado
desde el ltimo arranque. Cuando este reloj llega a 24 horas,
comenzar otra vez desde cero, y el Tiempo de Funcionamiento
(das) ser incrementado en un da.
Tiempo de Funcionamiento Restaurable (Rstbl Run Time)
(das) Este Tiempo de Funcionamiento Restaurable por el
usuario registra el nmero de das de 24 horas que el motor ha
funcionado desde la ltima vez que el usuario lo inicializ.
Tiempo de Funcionamiento Restaurable (Rstbl Run Time)
Este Tiempo de Funcionamiento Restaurable por el usuario
registra el nmero de horas, minutos, y segundos (HMS) que el
motor ha funcionado desde la ltima vez que el usuario lo
inicializ. Cuando este reloj llega a 24 horas, revertir a cero y el
Tiempo de Funcionamiento Restaurable (das) ser
incrementado en un da.
Restaurar Tiempo de Funcionamiento (Reset Run Time) Use
este punto de despliegue para restaurar (inicializar) los
contadores de Tiempo de Funcionamiento Restaurable a cero.
41
Mueva el cursor hasta que resalte este punto, luego oprima la
tecla ENTER. Los dos contadores restaurables volvern a cero,
y, si el motor est funcionando, comenzarn a acumular tiempo
inmediatamente.
Tiempo Total de Funcionamiento (Ttl Run Time) El Tiempo
Total de Funcionamiento (das) registra el nmero total de das
que el motor ha funcionado desde que fue instalado y
comisionado por primera vez.
Tiempo Total de Funcionamiento (Ttl Run Time) Este reloj
registra las horas, minutos, y segundos (HMS) que el motor ha
funcionado desde que fue instalado y comisionado por primera
vez. Cuando este reloj llega a 24 horas, comenzar otra vez
desde cero, y el Tiempo Total de Funcionamiento (das) ser
incrementado en un da.
Tiempo de Parada (Down Tm) El Tiempo de Parada (das)
registra el nmero total de das que el motor ha estado detenido
desde la ltima vez que fue parado.
Tiempo de Parada (Down Tm) El contador Tiempo de Parada
registra las horas, minutos, y segundos (HMS) que el motor ha
estado detenido desde la ltima vez que fue parado. Cuando
este reloj llega a 24 horas, comenzar otra vez desde cero, y el
Tiempo de Parada (das) ser incrementado en un da.
Tiempo Total de Parada (Ttl Dn Tm) El Tiempo Total de
Parada (das) registra y acumula el nmero total de das que el
motor ha estado detenido desde que fue comisionado y
arrancado por primera vez.
Tiempo Total de Parada (Ttl Dn Tm) El contador Tiempo Total
de Parada registra y acumula las horas, minutos, y segundos
(HMS) que el motor ha estado detenido desde que fue
comisionado y arrancado por primera vez. Cuando este reloj
llega a 24 horas, comenzar otra vez desde cero, y el Tiempo
Total de Parada (das) ser incrementado en un da.
Contador de Arranques (Strts Cntr) El Contador de Arranques
despliega el nmero de arranques automticos que han ocurrido,
durante los cuales el motor no funcion el tiempo suficiente como
para hacer expirar la Demora para Restaurar el Contador de
Arranques. Si este contador de arranques llega al valor que est
programado en el Mximo de Arranques Permitidos, el
controlador entrar en un estado de bloqueo y no permitir
ningn intento adicional de arranque hasta que el bloqueo sea
eliminado. Este parmetro se puede acceder en el grupo de
mens CONFIGURACIN DE Electrospeed GCS y se duplica
aqu slo para comodidad del operador.
Mximo de Arranques Permitidos (Max Alowd Strts) El
parmetro mximo de arranques permitidos controla la cantidad
de intentos de arranque automtico que se permiten antes que el
controlador se bloquee y evite todo arranque adicional.
42
Demora para Restaurar Contador de Arranques (Strts Cntr
Rst) Este valor controla la cantidad de tiempo, en minutos, que
el motor debe funcionar antes que el Contador de Arranques
automticos vuelva a cero. Cuando esta demora ha expirado y el
CONTADOR DE ARRANQUES vuelve a cero, el controlador
puede intentar otra vez tantos arranques automticos como sea
permitido por el parmetro Mximo de Arranques Permitidos.
Este valor se puede acceder tambin en el grupo de mens
CONFIGURACIN DE ESPEED GCS y se duplica aqu slo
para comodidad del operador.
REGISTRO DE DATOS EN TARJETA DE PC
Esta pantalla brinda acceso a las funciones de registro de datos
provistas con el controlador GCS. Los datos registrados son
guardados en una tarjeta de memoria no voltil insertada en la
ranura suministrada en la unidad de despliegue GCS. Las
tarjetas de memoria de PC se formatean y estructuran con un
formato de archivo DOS. Cuando se las conecta en la ranura de
tarjeta de PC de una computadora personal, la tarjeta debera
aparecer como una unidad de disco y los datos registrados
aparecern como un tipo de archivo normal DOS en esa tarjeta.
Para usar, leer o manipular los datos registrados, el usuario
puede abrir el archivo usando MS Excel, MS Word o cualquier
otro software de PC que pueda importar un archivo de tipo
variables separadas por coma o CSV. Como puede verse en
el prximo grfico ms abajo, las secciones de la pantalla
ESTATUS (STATUS) y MEDIDA (SIZE) se llenan con la
informacin apropiada cuando se inserta una tarjeta de memoria
vlida.
Activar / Desactivar Registro de Datos (Enable / Disable
Datalogging) Use este rengln de men para arrancar o
detener la funcin de registro de datos. Mueva el cursor sobre
este rengln y oprima la tecla ENTER para alternar entre Activar
y Desactivar. Si este rengln se cambia a Activar Registro de
Datos, el controlador GCS comenzar a registrar los datos de
acuerdo a la configuracin dentro del prximo rengln del men,
Configurar Registro de Datos. A partir de la versin 4.80 del
software de la unidad de despliegue, el permiso para activar o
desactivar registro de datos depende del nivel de seguridad
permitido. Si la seguridad est activa, el usuario debe ingresar
una contrasea vlida para que se le permita activar/ desactivar
el registro de datos. Refirase a la prxima seccin para
instrucciones para configurar el registro de datos.
Configurar Registro de Datos (Setup Datalogging) Para
acceder a las pantallas de configuracin de registro de datos,
mueva el cursor a esta ubicacin y oprima ENTER. Note que la
funcin de registro de datos debe estar desactivada antes que se
permita acceso a la pantalla de configuracin de registro de
datos. Las pantallas que se ilustran ms abajo se usan para
configurar las opciones de registro de datos. Luego que se ha
43
completado la configuracin, la misma se guarda en memoria no
voltil y se la retiene an en el caso de falla del suministro de
energa. En tal caso, el usuario no necesita volver a ingresar la
configuracin, ya que el GCS se reconfigurar a s mismo
usando la configuracin guardada.
CONFIGURAR REGISTRO DE DATOS (DATALOG SETUP)
Esta pantalla brinda al usuario la capacidad de configurar el tipo
y frecuencia de datos a ser registrados. Se pueden registrar
hasta doce variables de datos a intervalos de 1 a 9000
segundos. Cada una de los doce datos variables registrados
requiere que el usuario ingrese una identificacin de valor (PID
en ingls), una hora de comienzo, banda inactiva y un intervalo
de registro. Una vez que la configuracin de registro de datos
est completa, oprima la tecla MENU para salir.
Descripcin (Description) Mueva el cursor para resaltar una
de las filas (1 a 12) en esta columna y oprima ENTER. En ese
momento, aparecer una pantalla Seleccionar tem (Select
Item). Use las teclas con flecha para mover el cursor y resaltar
el tem a ser registrado y oprima ENTER. El valor de dato
seleccionado se agrega entonces al campo Descripcin para
registro de datos. Ajuste las variables restantes, intervalo, banda
inactiva y Activar para ese valor para completar la configuracin.
Descripcin (Seleccionar tem) (Select Item) Esta ilustracin
muestra la primera pantalla de la lista de seleccin. Mueva el
cursor a la derecha para desplegar tems adicionales para
seleccionar. Note que si el tem deseado no est en la lista, el
Men de Utilitarios provee un mtodo alternativo para
seleccionar valores para registro de datos. Si cualquier
parmetro actualmente seleccionado para registro de datos debe
ser sacado, coloque primero el cursor en esa posicin, oprima
ENTER para abrir esta pantalla, seleccione la lnea en blanco al
comienzo de la primera pantalla y oprima ENTER otra vez. Esto
har que la entrada de registro de datos en esa lnea se cambie
a inactiva.
(Tiempo de Comienzo) La variable Tiempo de
Comienzo demorar el comienzo del registro de datos para este
valor el nmero de segundos ingresado. Por ejemplo, si se
ingresa 45 se har que la primera muestra para el registro ocurra
45 segundos despus de haber sido activada. (Nota: Esta
funcin no est disponible actualmente)
(Intervalo) Mueva el cursor a la columna Intervalo y
oprima ENTER para definir el intervalo entre valores registrados.
Este valor controla cun a menudo se registran datos para este
valor del registro. El intervalo ms corto posible es 1 segundo
mientras que el intervalo mximo es 9000 segundos (2 horas, 46
minutes, 39 segundos).
44
Banda inactiva (Dedbnd) El valor de banda inactiva se usa
para ayudar a limitar la cantidad total de datos registrados en el
archivo. Si el valor de la variable siendo monitoreada no cambia
en un valor mayor a este parmetro, no se agregan nuevos datos
al archivo de registro. Esto puede ser muy til cuando se estn
diagnosticando instalaciones con problemas ya que slo los
datos que excedan este valor sern registrados.
Activar (Enable) Este valor controla si el controlador
Electrospeed grabar (registrar) los datos asociados con el
campo descripcin. Si este valor despliega un tilde, , los datos
sern registrados, si despliega una X, los datos no sern
registrados. Mueva el cursor a esta variable y oprima ENTER,
luego oprima las teclas con flecha ARRIBA o ABAJO para
alternar el valor entre activo e inactivo.
GUARDAR DATOS HISTRICOS (SAVE HISTORICAL DATA)
Este grupo de funciones permite que el usuario copie las bases
de datos histricas internas a la tarjeta de memoria de PC. La
mayora de computadoras con ranura de tarjeta tipo PCMCIA
pueden leer esta tarjeta y los datos contenidos en la misma.
Todos los archivos de datos a continuacin se graban en la
tarjeta de PC en un formato de variables separadas por coma
(*.csv). Los datos sern grabados a un archivo tipo
Windows/DOS de tarjeta de PC nombrado de acuerdo a las
siguientes convenciones:
El nombre del archivo comenzar con el da del mes (1 a 31) y la
hora y minutos actuales. Si se ha ingresado un nombre de sitio,
se agregar al nombre del archivo y finalmente se agrega el
identificador de tipo de archivo. En el ejemplo que se muestra a
la derecha, el nombre de archivo del Registro de Eventos ser
131431 12-14 Amelia Event.CSV. En este caso, puesto que se
ha ingresado un nombre de sitio, todos los archivos histricos
sern grabados en un subdirectorio de la Tarjeta de PC
nombrado 12-14 Amelia. Cuando no se suministre nombre de
sitio, los archivos se guardan en el directorio raz de la tarjeta de
PC.
Historia de Paradas (Shutdown History) Esta funcin copiar
la base de datos histrica de paradas interna desde el
Electrospeed GCS a la tarjeta de PC.
Historia de Eventos (Event History) Esta funcin copiar la
base de datos histrica de eventos interna desde el Electrospeed
GCS a la tarjeta de PC.
Grfico de Amperaje Fase B (Phase B Ampchart) Esta
funcin copiar los datos internos del Grfico de Amperaje Fase
B desde el Electrospeed GCS a la tarjeta de PC.
GUARDAR/CARGAR CONFIGURACIN DEL SISTEMA
(SAVE/LOAD SYSTEM SETUPS)
La configuracin del Electrospeed se puede grabar en la tarjeta
de memoria de PC. Esta configuracin puede ser usada para
45
archivar los valores, o para repetir estos valores en otro
controlador. Mueva el cursor a esta ubicacin y oprima ENTER
para acceder a la pantalla que se muestra abajo.
Guardar Configuracin en Tarjeta de PC (Save Setup to PC
Card) Para guardar todos los valores de un controlador GCS,
mueva el cursor a esta ubicacin y oprima ENTER. La pantalla
que se despliega a continuacin mostrar al nombre del sitio.
NOTA: Como se indica en esta ilustracin, no se permite volver a
cargar valores de configuracin mientras el motor est
funcionando. Para subir (cargar) valores de configuracin,
detenga primero el motor.
GUARDAR CONFIGURACIN (SAVE SETUP)
Esta pantalla se despliega como una confirmacin despus que
el usuario ha seleccionado GUARDAR CONFIGURACIN EN
TARJETA DE PC (SAVE SETUP TO PC CARD) del men
anterior. Si todos los valores deben ser guardados, simplemente
oprima la tecla ENTER en esta pantalla y la unidad comenzar
guardando los valores configurables en la tarjeta de PC. Mientras
esta funcin est procesando, la pantalla mostrar diversos
indicadores de progreso. Una vez que los datos se han
guardado, la pantalla revertir al men principal de REGISTRO
DE DATOS.
Desde este men, el usuario puede oprimir las teclas con flecha
DERECHA o IZQUIERDA para acceder a otra pantalla que le
permite especificar cul de los valores internos ser guardado.
Una pantalla similar a la prxima se desplegar.
Guardar Configuracin Seleccionar informacin a Guardar)
(Save Setup Select info to Save) Esta pantalla permite al
usuario seleccionar el tipo de valores de configuracin a ser
guardados en la Tarjeta de PC. Si se deja sin cambiar, todos los
valores sern guardados. Para evitar que alguna categora sea
guardada en la Tarjeta de PC, use las teclas con flecha para
mover el cursor a esa lnea y oprima ENTER. La tilde al
comienzo de la lnea cambiar a una X, indicando que esa
categora no ser guardada. Para seleccionar o inhibir todas las
categoras rpidamente, cambie el rengln de men Todas las
Secciones (All Sections). Cuando todas las secciones deseadas
46
han sido seleccionadas, oprima la flecha DERECHA o
IZQUIERDA otra vez para volver el cursor al men Guardar
Configuracin en Tarjeta de PC y oprima ENTER.
CARGAR CONFIGURACIN DESDE TARJETA DE PC (LOAD
SETUP FROM PC CARD)
Esta funcin se usa para restaurar una configuracin
previamente guardada desde una Tarjeta de PC. Primero guarde
una configuracin vlida usando la funcin Guardar
Configuracin explicada previamente. Inserte una Tarjeta de PC
con una configuracin vlida guardada en un controlador GCS,
mueva el cursor a esta posicin y oprima ENTER para proseguir
a la prxima pantalla que se muestra ms abajo.
CARGAR CONFIGURACIN DE TARJETA DE PC
SELECCIONAR ARCHIVO (LOAD SETUP FROM PC CARD
SELECT FILE)
Esta pantalla se usa para navegar la estructura de directorio de
la Tarjeta de PC para seleccionar un archivo de configuracin
especfico a cargar. En la ilustracin, el cursor est resaltando el
archivo llamado 181741 12-14 AMELIA setup. Oprima ENTER
para seleccionar este archivo y proseguir a la prxima pantalla
que se muestra ms abajo.
Cargar Configuracin desde Tarjeta de PC (Load Setup from
PC Card) El controlador GCS est listo para cargar la
configuracin seleccionada desde la Tarjeta de PC. Si se va a
cargar la configuracin completa, oprima ENTER para proseguir
con la carga. Indicadores de progreso mostrarn los pasos
realizados. Una vez que la carga est completa, la pantalla
revertir al men principal de REGISTRO DE DATOS.
Si slo se cargarn secciones especficas del archivo, oprima las
teclas con flecha IZQUIERDA o DERECHA para acceder a la
pantalla de seleccin de seccin que se muestra a continuacin.
47
Cargar Configuracin Seleccionar informacin a Cargar
(Load Setup Select info to Load) Use esta pantalla para
seleccionar las secciones disponibles del archivo de
configuracin guardado. Mueva el cursor con las teclas de flecha
para resaltar una seccin disponible y oprima ENTER para
marcarla. El ejemplo que se muestra a la izquierda tiene slo una
seccin disponible, Configuracin de Registro de Datos, y est
seleccionada para carga.
Cuando todas las secciones deseadas han sido seleccionadas,
oprima la flecha DERECHA o IZQUIERDA otra vez para volver el
cursor al men Cargar Configuracin desde Tarjeta de PC y
oprima ENTER.
FUNCIONES DE DIRECTORIO / ARCHIVOS (DIRECTORY /
FILE FUNCTIONS)
Este rengln de men brinda acceso a un administrador bsico
de directorios y archivos. Oprima la tecla ENTER para desplegar
una pantalla similar a la prxima ilustracin.
Cuando se selecciona el rengln de men Funciones de
Directorio / Archivos, se desplegar una pantalla similar a la de la
izquierda. Muestra el cursor resaltando el subdirectorio llamado
12-14 AMELIA. Oprima la tecla ENTER para ver los contenidos
de ese directorio. Se despliegan la hora y fecha de creacin del
archivo/ directorio, y su medida, al fondo de la pantalla.
Cuando el cursor est resaltando un archivo, oprima la tecla con
flecha DERECHA para borrarlo. Para confirmar el comando de
borrado de archivo, oprima ENTER otra vez a la pregunta u
oprima la tecla MENU para cancelar.
48
INFORMACIN AVANZADA (ADVANCED INFORMATION)
Este rengln de men brinda acceso a una pantalla que
despliega informacin tcnica relativa a la Tarjeta de PC
insertada. Se muestra una pantalla de ejemplo abajo.
Este es un ejemplo del tipo de informacin disponible relativa a la
estructura del sistema de archivos de la Tarjeta de PC.
INFORMACIN DEL SITIO (SITE INFORMATION)
Esta pantalla se usa para entrar un nombre descriptivo del sitio y
notas opcionales para este controlador GCS. El valor original de
fbrica para estas entradas es en blanco o vacas. Si se ingresa
un nombre de sitio, se lo usa para crear un subdirectorio del
mismo nombre en toda Tarjeta de PC que se inserte en la unidad
de despliegue. Todo dato histrico o guardado se grabar en ese
subdirectorio. Mueva el cursor para realzar uno de esos
renglones y oprima ENTER para acceder a la pantalla para
ingreso de datos. La seccin de Notas contiene dos lneas
capaces de contener 20 caracteres cada una.
La informacin que describe cmo usar la pantalla de ingreso de
datos puede encontrarse en la seccin MEN DE UTILITARIOS
de este manual.
49
GRFICOS (GRAPHING)
El grupo de pantallas GRFICOS rene todas las funciones de
grficos disponibles.
Grfico de Amperaje de Fase B Este grfico de tiempo versus
corriente sirve el mismo propsito que el registrador circular
estndar de amperaje que se encuentra comnmente en las
aplicaciones de control de motores. El Electrospeed GCS toma
muestras de la corriente de fase B del motor y registra los
valores mnimo y mximo durante cada perodo de un minuto y
un valor promedio cada cuatro minutos. Los valores mximo,
mnimo y promedio se usan para crear este grfico. El
controlador registra estos datos siempre que el motor est
funcionando. Cuando se han capturado los datos para siete das,
la funcin de grfico de amperaje comenzar a grabar sobre los
datos ms viejos con valores nuevos. De esta manera, el
controlador siempre retendr los datos para el perodo de
funcionamiento de siete das ms reciente. Estos datos estn
tambin disponibles para ser bajados a una computadora
personal para anlisis y grficos en programas de aplicacin
comunes tales como MS Excel y Lotus 123. Puesto que el grfico
de amperaje slo contiene los ltimos siete das de datos
operativos, se ha agregado la siguiente funcin de servicio a las
funciones del controlador GCS. Si se inserta una tarjeta de
memoria de PC vlida con suficiente memoria vaca y se la deja
en la ranura de Tarjeta de PC de la unidad de despliegue GCS,
el archivo del grfico de amperaje se grabar automticamente a
la Tarjeta de PC cada domingo a la medianoche. El archivo del
grfico de amperaje contendr hasta 300 Kilobytes por semana,
por lo tanto una tarjeta de PC de 8 Megabytes ser capaz de
registrar al menos los datos de 26 semanas o seis meses. El
formato de datos del grfico de amperaje es texto separado por
comas, por lo tanto puede ser abierto y ledo por cualquier
programa de proceso de textos o de hoja de clculos.
GRFICO DE AMPERAJE B ( B AMPCHART)
Esta pantalla de grfico despliega los datos del grfico de
amperaje descritos en la seccin anterior. Use las teclas con
flecha ARRIBA/ABAJO para seleccionar la duracin del grfico
de 12, 24, 48 horas o 1 semana. Use las teclas con flecha
IZQUIERDA/DERECHA para seleccionar la ubicacin de
referencia de comienzo. La seleccin Referido A: Comienzo de
Grfico (Referenced To: Graph Start) hace que el eje del lado
izquierdo del grfico sea establecido al comienzo de los datos y
extendido hacia delante en el tiempo en la cantidad seleccionada
por las teclas con flecha ARRIBA/ABAJO. La seleccin Fin de
Grfico (Graph End) establece el eje de la derecha del grfico en
la hora/fecha actual. La seleccin Referido a Cursor (Referenced
to Cursor) crea un grfico centrado en la posicin actual de la
lnea del cursor extendindose hacia delante y hacia atrs en el
tiempo la duracin seleccionada en Mustrame: seleccin
(Show me: selection). Una vez que estas opciones estn
establecidas, oprima la tecla ENTER para desplegar el grfico.
50
La siguiente ilustracin ms abajo muestra un grfico de
amperaje de 24 horas, referido al comienzo de los datos a las
10:13:51 AM. El cursor est actualmente en el momento que
representa las 15:41:37 PM.
Despus de oprimir la tecla ENTER, el controlador GCS
diagramar el grfico y mostrar las nuevas opciones de teclas
en el fondo de la pantalla como se muestra a la izquierda.
Cuando se est desplegando el grfico, se puede cambiar la
escala del eje Y hacia arriba o abajo oprimiendo las teclas
ARRIBA/ABAJO. Si se oprimen las teclas con flecha
IZQUIERDA/DERECHA se mover el cursor a la izquierda o
derecha en la pantalla. Para desplegar otra vez la pantalla de
Opciones (duracin y referencia) oprima la tecla ENTER. Oprima
la tecla con flecha IZQUIERDA o DERECHA para desplegar la
hora, fecha y valores Mnimo/Mximo actuales. La pantalla de
grfico cambiar para desplegar la hora de comienzo del grfico,
la hora de la posicin actual del cursor y los valores mnimo y
mximo registrados en la posicin del cursor. Mientras que se
despliega el grfico, el Tiempo de Comienzo (Strt Time) que se
despliega representa la hora/fecha en el eje de la izquierda,
mientras que la Hora de Cursor (Crsr Time) muestra la
hora/fecha de la posicin actual del cursor. Estos dos
despliegues de fecha alternarn entre hora y fecha con un ciclo
de aproximadamente un segundo.
Si se desea, los datos colectados para crear este grfico pueden
ser transferidos a pedido a una tarjeta de memoria de PC
insertada en la ranura de tarjeta de la unidad de despliegue
grfico. El comando para copiar los datos a esta tarjeta pueden
ser ejecutados desde las selecciones de men: REGISTRO DE
DATOS E HISTORIA / REGISTRO DE DATOS / GUARDAR
DATOS HISTRICOS / GRFICO DE AMPERAJE FASE B.
51
FALLAS Y ALARMAS (FAULTS &
ALARMS)
El grupo de pantallas FALLAS y ALARMAS brinda acceso a las
funciones de proteccin del motor y del controlador dentro del
Electrospeed GCS. Este grupo de mens incluye una pantalla de
configuracin para cada condicin de alarma brindando al
usuario control completo sobre la respuesta del controlador del
motor a estas ocurrencias. La primera pantalla que se ve luego
de oprimir ENTER en esta seleccin del Men Principal ser
SOBRECARGA.
SOBRECARGA (OVERLOAD)
Esta pantalla contiene los parmetros relativos a proteccin de
sobrecarga en un grupo. Las alarmas de sobrecarga protegen al
motor de corriente de entrada excesiva.
Valor (Setpoint) El valor de sobrecarga determina la corriente
de salida mxima que puede ser enviada al motor sin activar la
rutina de sobrecarga y causar una parada subsiguiente del
motor. El controlador usa la ms alta de las corrientes trifsicas
para calcular la magnitud de la sobrecarga. El valor tpico para la
sobrecarga es de 0 a 20% ms alto que la corriente de placa
plena del motor, o la corriente de placa del motor multiplicada por
la proporcin del transformador (voltaje de salida/voltaje de
entrada), cuando hay un transformador conectado entre el
controlador y el motor. Tanto el valor de la sobrecarga como la
demora para parada por sobrecarga deberan definirse tan bajos
como sea prctico para la aplicacin.
Corriente de Entrada Ms Alta (Highest Input ) Este
parmetro despliega la corriente de entrada ms alta de
cualquiera de las tres fases. La condicin de sobrecarga se
calcula en base a esta nica fase ms alta de corriente de motor.
Este valor no es ajustable.
Habilitar Alarma (Alarm Enable) Este valor normalmente
controla si el controlador detendr el motor debido a una
condicin de sobrecarga. En el caso del controlador
Electrospeed GCS, este parmetro no puede desactivarse y la
proteccin de sobrecarga est permanentemente habilitada.
Habilitar Bloqueo (Lockout Enable) Este parmetro determina
si el controlador entrar en una condicin de bloqueo cuando
haya parado el motor debido a sobrecarga. Si este valor est
habilitado y el motor es detenido debido a sobrecarga, el
controlador se bloquear y evitar todo intento adicional de
arranque hasta que el bloqueo sea eliminado. El valor tpico es
S (YES), las paradas por sobrecarga bloquearn los
arranques automticos.
52
Tiempo a Ignorar (Bypass Delay) Establece el nmero de
segundos que el controlador GCS esperar en caso de una
condicin de alarma por sobrecarga que est presente al
arrancar, o que ocurra durante este perodo a ignorar. Este reloj
tiene una resolucin de una dcima de segundo.
Demora de Parada (Shutdown Delay) Establece el nmero de
segundos que el controlador esperar en caso de una condicin
de alarma de sobrecarga que exista mientras el motor est
funcionando, pero slo despus de que el reloj de Tiempo a
Ignorar Sobrecarga haya expirado. La demora de parada se
define como la demora, en segundos, antes que el controlador
pare el motor cuando la corriente de entrada al mismo excede
150% o 1,5 veces el valor de corriente de sobrecarga. Si la
corriente del motor excede el valor de sobrecarga, pero es mayor
o menor que 150% o 1,5 veces el valor configurado, el
controlador alargar o acortar la demora por medio de una
funcin matemtica que simula los efectos de recalentamiento
del motor. La relacin entre la corriente y la demora est
establecida por la constante I
2
T, y enunciada en forma sencilla,
cuanto mayor es la corriente de sobrecarga, menor ser la
demora. En una instalacin sumergible tpica, la demora de
sobrecarga podra estar definida en 2 segundos cuando la
corriente llega al 150% (o 1,5 veces) el valor de la sobrecarga.
La constante I
2
T sera (1.5)
2
* 2 = 4.5 y la demora antes de la
parada se expresa como:
CONSTANTE I
2
T/(MLTIPLO DE CORRIENTE DE SOBRECARGA)
2
=
4.5 / (1.5)
2
= 4.5 / 2.25 = 2 segundos
Si la corriente de sobrecarga alcanzase el 200%, o 2 veces el
valor de sobrecarga, la demora para parada sera de 4.5/(2.0)
2
=
4.5 / 4 = 1.125 segundos. Sin embargo, si el Controlador de
Velocidad Variable tiene carga pesada, el controlador se
proteger a s mismo causando una parada por Interrupcin por
Sobrecarga Instantnea (IOT en ingls) antes que la corriente
llegue al 200%. El tiempo de sobrecarga debera establecerse
entre dos y ocho segundos para un motor sumergible y de 30 a
45 segundos para motores convencionales.
Arranque de Sobrecarga (Rstrt on Ovld) El Arranque de
Sobrecarga programa los Parmetros Auxiliares de Arranque de
Sobrecarga (ARPs en ingls) para permitir al controlador un
intento de arranque automtico del motor luego de una parada
por Sobrecarga. Todos los Parmetros Auxiliares de Arranque
se pueden acceder desde cada pantalla individual de fallas y
alarmas. Sin embargo, en el caso de Sobrecarga, cuando se
establece el Arranque de Sobrecarga en si, se activa el ARP
para Sobrecarga y los arranques se definen como uno. La
ilustracin de la izquierda muestra los valores de ARP cuando
este parmetro est activo.
Parmetros Auxiliares de Arranque (Aux Rstrt Parms)
Cuando este parmetro est en S (YES), el controlador
53
Electrospeed est forzado a usar los parmetros de arranque
enumerados a continuacin cuando genera una parada por
alarma de Sobrecarga. Si este parmetro est definido como
NO, el controlador usar los parmetros de arranque globales
cuando realice un arranque automtico. Los parmetros de
arranque globales se establecen a partir de los mens de
configuracin del Electrospeed GCS.
Arranques Permitidos (Allowed Starts) Arranques permitidos
controla el nmero de arranques automticos que se permitirn
cuando el controlador haya generado una parada por Sobrecarga
y el parmetro Parmetros Auxiliares de Arranque haya sido
definido como S.
Demora de Arranque (Restart Delay) Demora de Arranque
controla la cantidad de tiempo que el controlador esperar antes
de intentar un arranque del motor cuando ste ha sido detenido
debido a sobrecarga y el parmetro Parmetros Auxiliares de
Arranque haya sido definido como S.
BAJA CARGA (UNDERLOAD)
Esta pantalla contiene los parmetros relativos a proteccin de
baja carga en un grupo. Las alarmas de baja carga protegen al
motor de corriente de entrada insuficiente. En aplicaciones de
bombas sumergibles, la baja carga indica usualmente prdida de
refrigeracin debido a bajos volmenes de fluido pasando a
travs del motor.
Valor (Setpoint) El parmetro valor debe definirse como el
valor de corriente de motor debajo del cual el controlador
detendr al motor. El valor tpico es del 15 al 20% por debajo de
la fase de corriente ms baja a la frecuencia de salida mnima.
Corriente de Entrada Ms Baja (Lowest Input ) Este
parmetro despliega la corriente de entrada ms baja de
cualquiera de las fases. La condicin de alarma de baja carga se
calcula en base a esta fase de corriente de motor ms baja. Este
valor no es ajustable.
Habilitar Alarma (Alarm Enable) Este valor controla si el
controlador detendr el motor debido a una condicin de baja
carga o la ignorar. El valor tpico es S (YES), proteccin de
baja carga habilitada.
Habilitar Bloqueo (Lockout Enable) Este parmetro determina
si el controlador entrar en una condicin de bloqueo cuando
haya parado el motor debido a baja carga. Si este valor est
habilitado y el motor es detenido debido a baja carga, el
controlador se bloquear y evitar todo intento adicional de
arranque hasta que el bloqueo sea eliminado. El valor tpico es
NO, no bloquearse luego de parada.
Tiempo a Ignorar (Bypass Delay) Establece el nmero de
segundos que el controlador GCS esperar en caso de una
condicin de alarma de baja carga que est presente durante el
54
arranque, u ocurra durante este tiempo a ignorar. El valor tpico
es de 60 segundos.
Demora de Parada (Shutdown Delay) Establece el nmero de
segundos que el controlador esperar en caso de una condicin
de alarma de baja carga que exista mientras el motor est
funcionando, pero slo despus que el reloj de Tiempo a Ignorar
Baja Carga haya expirado. El valor tpico es de 8 segundos.
Arranques Infinitos (Infinite Rstrts) Si este parmetro se
define como S (YES) se har que el controlador permita un
nmero infinito de paradas y arranques por Baja Carga. El
Electrospeed GCS usar normalmente los parmetros Habilitar
Bloqueo por Baja Carga o Mximo de Arranques Permitidos para
bloquear e inhibir arranques automticos excesivos, protegiendo
por lo tanto al motor de intentos de arranque repetitivos. Hay
algunas situaciones, sin embargo, que requieren la capacidad de
arrancar la bomba un nmero indefinido de veces cuando la
causa de la parada es Baja Carga. El valor tpico es NO.
Parmetros Auxiliares de Arranque (Aux Rstrt Parms)
Cuando este parmetro est en S (YES), el controlador
Electrospeed est forzado a usar los parmetros de arranque
enumerados a continuacin cuando genera una parada por
alarma de BAJA CARGA. Si este parmetro est definido como
NO, el controlador usar los parmetros de arranque globales
cuando realice un arranque automtico. Los parmetros de
arranque globales se establecen a partir de los mens de
configuracin del Electrospeed GCS.
Arranques Permitidos (Allowed Starts) Arranques permitidos
controla el nmero de arranques automticos que se permitirn
cuando el controlador haya generado una parada por BAJA
CARGA y el parmetro Parmetros Auxiliares de Arranque haya
sido definido como S.
Demora de Arranque (Restart Delay) Demora de Arranque
controla la cantidad de tiempo que el controlador esperar antes
de intentar un arranque del motor cuando ste ha sido detenido
debido a BAJA CARGA y el parmetro Parmetros Auxiliares de
Arranque haya sido definido como S.
SOBREVOLTAJE DE ENTRADA (INPUT OVRVLT)
Esta pantalla contiene los parmetros relativos a proteccin de
Sobrevoltaje de Entrada en un grupo. Las alarmas de
Sobrevoltaje protegen al Electrospeed GCS de las tensiones que
resultan de un excesivo voltaje de entrada y proveen al operador
una indicacin sobre problemas que existen en el suministro de
energa.
Valor (Setpoint) El parmetro valor de Sobrevoltaje de Entrada
debe definirse en el valor del voltaje de entrada por encima del
cual el controlador detendr el motor. El valor tpico es 5% por
encima del valor de placa del controlador.
55
Fase de Voltaje Ms Alta (Highest Vlts ) Este parmetro
despliega la mayor de las fases de voltaje de entrada. La
condicin de alarma de sobrevoltaje se calcula en base a este
valor. Este valor no es ajustable por el usuario.
Habilitar Alarma (Alarm Enable) Este valor controla si el
controlador detendr el motor debido a una condicin de
sobrevoltaje o si la ignorar.
Habilitar Bloqueo (Lockout Enable) Este parmetro determina
si el controlador entrar en una condicin de bloqueo cuando
haya parado el motor debido a sobrevoltaje. Si este valor est
habilitado y el motor es detenido debido a sobrevoltaje, el
controlador se bloquear y evitar todo intento adicional de
arranque hasta que el bloqueo sea eliminado. El valor tpico es
NO, no bloquear arranques automticos luego de parada.
Tiempo a Ignorar (Bypass Delay) Establece el nmero de
segundos que el controlador GCS esperar en caso de una
condicin de alarma de Sobrevoltaje que est presente durante
el arranque, o que ocurra durante este tiempo a ignorar. El valor
tpico es de 4 segundos.
Demora de Parada (Shutdown Delay) Establece el nmero de
segundos que el controlador esperar en caso de una condicin
de alarma de Sobrevoltaje que exista mientras el motor est
funcionando, pero slo despus que el reloj de Tiempo a Ignorar
Sobrevoltaje haya expirado. El valor tpico es de 4 segundos.
Parmetros Auxiliares de Arranque (Aux Rstrt Parms)
Cuando este parmetro est en S (YES), el controlador
Electrospeed est forzado a usar los parmetros de arranque
enumerados a continuacin cuando genera una parada por
alarma de Sobrevoltaje. Si este parmetro est definido como
NO, el controlador usar los parmetros de arranque globales
cuando realice un arranque automtico. Los parmetros de
arranque globales se establecen a partir de los mens de
configuracin del Electrospeed GCS.
Arranques Permitidos (Allowed Starts) Arranques permitidos
controla el nmero de arranques automticos que se permitirn
cuando el controlador haya generado una parada por
Sobrevoltaje y el parmetro Parmetros Auxiliares de Arranque
haya sido definido como S.
Demora de Arranque (Restart Delay) Demora de Arranque
controla la cantidad de tiempo que el controlador esperar antes
de intentar un arranque del motor cuando ste ha sido detenido
debido a Sobrevoltaje y el parmetro Parmetros Auxiliares de
Arranque haya sido definido como S.
BAJO VOLTAJE DE ENTRADA (INPUT UNDVLT)
Esta pantalla contiene los parmetros relativos a proteccin de
Bajo Voltaje de Entrada en un grupo. Esta alarma ayuda a
detectar y anunciar problemas en el suministro de energa.
56
Valor (Setpoint) El parmetro valor de Bajo Voltaje debe
definirse en el valor del voltaje de entrada por debajo del cual el
controlador detendr el motor. El valor tpico es 20% por debajo
del voltaje de placa del controlador.
Fase de Voltaje Ms Baja (Lowest Vlts ) Este parmetro
despliega la menor de las tres fases de voltaje de entrada. La
condicin de alarma de Bajo Voltaje se calcula en base a este
valor ms bajo. Este valor no es ajustable por el usuario.
Habilitar Alarma (Alarm Enable) Este valor controla si el
controlador detendr el motor debido a una condicin de Bajo
Voltaje o si la ignorar.
Habilitar Bloqueo (Lockout Enable) Este parmetro determina
si el controlador entrar en una condicin de bloqueo cuando
haya parado el motor debido a Bajo Voltaje. Si este valor est
habilitado y el controlador es detenido debido a Bajo Voltaje, el
controlador se bloquear y evitar todo intento adicional de
arranque hasta que el bloqueo sea eliminado. El valor tpico es
NO, no bloquear arranques automticos luego de parada.
Tiempo a Ignorar (Bypass Delay) Establece el nmero de
segundos que el controlador GCS esperar en caso de una
condicin de alarma de Bajo Voltaje que est presente durante el
arranque, o que ocurra durante este tiempo a ignorar. El valor
tpico es de 0 segundos.
Demora de Parada (Shutdown Delay) Establece el nmero de
segundos que el controlador esperar en caso de una condicin
de alarma de Bajo Voltaje que exista mientras el motor est
funcionando, pero slo despus de que el reloj de Tiempo a
Ignorar Bajo Voltaje haya expirado. El valor tpico es de 4
segundos. Esta demora puede acortarse an ms por medio de
una funcin matemtica que simula los efectos de
recalentamiento del motor y es establecida por la constante T/V
2
.
Enunciada en forma sencilla, cuanto menor es el voltaje de
entrada, menor ser la demora. En una instalacin sumergible
tpica la demora de bajo voltaje podra estar definida en 4
segundos cuando el voltaje cae por debajo del valor configurado
(1 vez bajo el valor de voltaje). Puesto que el valor de bajo voltaje
es igual a 1 vez el nivel de bajo voltaje, la constante T/V
2
sera
4/(1)
2
= 4. La demora antes de la parada sera entonces:
(CONSTANTE T/V
2
) / ((mltiplo de valor de bajo voltaje)
2
)
o 4/1
2
= 4 segundos.
Si el bajo voltaje alcanzase 200%, o 2 veces el valor configurado
de Bajo Voltaje, la demora de parada sera de 4/(2.0)
2
= 4/4 o
1.00 segundo. El tiempo de bajo voltaje se establece
generalmente entre dos y ocho segundos para motores
sumergibles, y de 30 a 45 segundos para motores
convencionales.
57
Parmetros Auxiliares de Arranque (Aux Rstrt Parms)
Cuando este parmetro est en S (YES), el controlador
Electrospeed est forzado a usar los parmetros de arranque
enumerados a continuacin cuando genera una parada por
alarma de Bajo Voltaje. Si este parmetro est definido como
NO, el controlador usar los parmetros de arranque globales
cuando realice un arranque automtico. Los parmetros de
arranque globales se establecen a partir de los mens de
configuracin del Electrospeed GCS.
Arranques Permitidos (Allowed Starts) Arranques permitidos
controla el nmero de arranques automticos que se permitirn
cuando el controlador haya generado una parada por Bajo
Voltaje y el parmetro Parmetros Auxiliares de Arranque haya
sido definido como S.
Demora de Arranque (Restart Delay) Demora de Arranque
controla la cantidad de tiempo que el controlador esperar antes
de intentar un arranque del motor cuando ste ha sido detenido
debido a Bajo Voltaje y el parmetro Parmetros Auxiliares de
Arranque haya sido definido como S.
DESBALANCE DE VOLTAJE DE ENTRADA (INPUT VUNBAL)
Las alarmas de Desbalance de Voltaje de Entrada se usan para
detectar y anunciar problemas con la energa de entrada.
Valor (Setpoint) El parmetro valor de Desbalance de Voltaje
debe definirse en el valor porcentual de Desbalance de voltaje de
entrada por encima del cual el controlador detendr el motor. El
valor tpico es 4 a 10%.
Valor Actual (Present Value) Este parmetro despliega el
valor actual porcentual de Desbalance de Voltaje. Este
porcentaje se define como la desviacin mxima de cualquier
voltaje monofsico del valor promedio de las tres fases. La
condicin de alarma de Desbalance de Voltaje se calcula en
base a este porcentaje de desviacin. Este valor no es ajustable
por el usuario.
Habilitar Alarma (Alarm Enable) Este valor controla si el
controlador detendr el motor debido a una condicin de
Desbalance de Voltaje o si la ignorar.
Habilitar Bloqueo (Lockout Enable) Este parmetro determina
si el controlador entrar en una condicin de bloqueo cuando
haya parado el motor debido a Desbalance de Voltaje. Si este
valor est habilitado y el motor es detenido debido a Desbalance
de Voltaje, el controlador se bloquear y evitar todo intento
adicional de arranque hasta que el bloqueo sea eliminado. El
valor tpico es NO, no bloquear arranques automticos luego de
parada.
Tiempo a Ignorar (Bypass Delay) Establece el nmero de
segundos que el controlador GCS esperar en caso de una
condicin de alarma de Desbalance de Voltaje que est presente
58
durante el arranque, o que ocurra durante este tiempo a ignorar.
El valor tpico es de 4 segundos.
Demora de Parada (Shutdown Delay) Establece el nmero de
segundos que el controlador esperar en caso de una condicin
de alarma de Desbalance de Voltaje que exista mientras el motor
est funcionando, pero slo despus que el reloj de Tiempo a
Ignorar Desbalance de Voltaje haya expirado. El valor tpico es
de 1 segundo.
Parmetros Auxiliares de Arranque (Aux Rstrt Parms)
Cuando este parmetro est en S (YES), el controlador
Electrospeed est forzado a usar los parmetros de arranque
enumerados a continuacin cuando genera una parada por
Alarma de Desbalance de Voltaje de Entrada. Si este parmetro
est definido como NO, el controlador usar los parmetros de
arranque globales cuando realice un arranque automtico. Los
parmetros de arranque globales se establecen a partir de los
mens de configuracin del Electrospeed GCS.
Arranques Permitidos (Allowed Starts) Arranques permitidos
controla el nmero de arranques automticos que se permitirn
cuando el controlador haya generado una parada por
Desbalance de Voltaje de Entrada y el parmetro Parmetros
Auxiliares de Arranque haya sido definido como S.
Demora de Arranque (Restart Delay) Demora de Arranque
controla la cantidad de tiempo que el controlador esperar antes
de intentar un arranque del motor cuando ste ha sido detenido
debido a Desbalance de Voltaje de Entrada y el parmetro
Parmetros Auxiliares de Arranque haya sido definido como S.
PARADA POR BAJA VELOCIDAD (LOW SPEED TRIP)
El valor de Interrupcin por Baja Velocidad (LST en ingls)
protege al motor de operar por debajo de una frecuencia
seleccionada por el usuario durante un tiempo mayor al perodo
especificado.
Bloqueo de Baja Velocidad (Low Speed Clamp) El Bloqueo
de Baja Velocidad representa el lmite menor de la velocidad
requerida. La frecuencia de salida actual puede caer por debajo
de este valor. Una vez que la frecuencia caiga 0.5 Hz por debajo
de este parmetro, el controlador comenzar el proceso de
parada de Interrupcin por Baja Velocidad si esta alarma est
habilitada.
Frecuencia de Salida (Output Freq) La Frecuencia de Salida
despliega la frecuencia de operacin actual del controlador. La
seccin inversora del controlador GCS est siempre operando a
su frecuencia mnima an si el motor est detenido y no se
produce energa de salida. En consecuencia, este parmetro
desplegar una frecuencia mnima de 2,9 hertz hasta un mximo
de la salida real al motor. La Frecuencia de Salida no se puede
ajustar desde este valor, aunque se puede definir en el grupo de
mens CONFIGURACIN DE GCS 1.
59
Habilitar Alarma (Alarm Enable) El valor Habilitar Alarma de
Interrupcin por Baja Velocidad controla si el controlador
generar una parada debido a baja velocidad de salida. El valor
tpico es S (YES), la Alarma LST est habilitada.
Habilitar Bloqueo (Lockout Enable) El parmetro Habilitar
Bloqueo de Interrupcin por Baja Velocidad determina si el
controlador entrar en una condicin de bloqueo cuando haya
parado el motor debido a una condicin de Alarma de
Interrupcin por Baja Velocidad. Si este valor est habilitado y el
motor es detenido debido a Interrupcin por Baja Velocidad, el
controlador se bloquear y evitar todo intento adicional de
arranque hasta que el bloqueo sea eliminado. El valor tpico es
NO, no bloquear luego de parada.
Tiempo a Ignorar (Bypass Delay) El Tiempo a Ignorar
Interrupcin por Baja Velocidad establece el nmero de
segundos que el controlador GCS esperar en caso de una
condicin de alarma de Interrupcin por Baja Velocidad que est
presente durante el arranque, o que ocurra durante este tiempo a
ignorar. El valor tpico es la suma de la Demora de
Sincronizacin ms el Tiempo de Aceleracin.
Demora de Parada (Shutdown Delay) La Demora de Parada
de Interrupcin por Baja Velocidad establece el nmero de
segundos que el controlador esperar en caso de una condicin
de alarma de Interrupcin por Baja Velocidad que exista mientras
el motor est funcionando, pero slo despus que el reloj de
Tiempo a Ignorar Interrupcin por Baja Velocidad haya expirado.
El valor tpico es de 10 segundos.
SENSORES DE TEMPERATURA (TEMP SENSORS)
Este grupo de mens brinda acceso a los parmetros relativos a
los sensores de temperatura incorporados al Electrospeed GCS.
Cada sensor de calor tiene una pantalla de configuracin que
rene todos los parmetros relacionados con ese sensor
especfico. Resalte el rengln deseado del men con la barra
cursor y oprima ENTER para acceder a esa pantalla. Note que
no todos los sensores estn instalados en todos los modelos de
controladores. Si no est instalado, la alarma para dicho sensor
ser desactivada en la fbrica. Si las fallas de un sensor de
temperatura se abren, exhibirn en forma tpica una lectura a
escala plena de 300C.
DISIPADOR DE CALOR 1 (HEATSINK 1)
Esta pantalla despliega los parmetros relativos al Disipador de
Calor nmero uno.
Temperatura Actual (Present Temp) Este valor indica la
lectura de temperatura medida en el Disipador de Calor 1. Este
valor no es ajustable.
60
Lmite de Sobrecalentamiento (Over Temp Thld) El Lmite de
Sobrecalentamiento indica el valor de temperatura que el
controlador permitir sin ocasionar una parada. Este valor no es
ajustable por el usuario.
Habilitar Alarma (Alarm Enable) El valor Habilitar Alarma
controla si el controlador ocasionar una parada debido a una
lectura de temperatura por encima del lmite en el Disipador de
Calor 1. Este valor no es ajustable por el usuario.
Habilitar Bloqueo (Lockout Enable) El parmetro Habilitar
Bloqueo determina si el controlador entrar en una condicin de
bloqueo cuando haya parado el motor debido a una condicin de
alarma de Sobrecalentamiento del Disipador de Calor 1. Si este
valor est habilitado y el motor es detenido debido a
Sobrecalentamiento del Disipador de Calor 1, el controlador se
bloquear y evitar todo intento adicional de arranque hasta
que el bloqueo sea eliminado. El valor tpico es NO, no
bloquear luego de parada.
Tiempo a Ignorar (Bypass Delay) El Tiempo a Ignorar
establece el nmero de segundos que el controlador GCS
esperar en caso de una condicin de alarma de
Sobrecalentamiento del Disipador de Calor 1 que est presente
durante el arranque, o que ocurra durante este tiempo a ignorar.
Este valor no es ajustable por el usuario.
Demora de Parada (Shutdown Delay) La Demora de Parada
establece el nmero de segundos que el controlador GCS
esperar en caso de una condicin de alarma de
Sobrecalentamiento del Disipador de Calor 1 que exista mientras
el motor est funcionando, pero slo despus que el reloj de
Tiempo a Ignorar Sobrecalentamiento del Disipador de Calor 1
haya expirado. El valor tpico es de 10 segundos. Este valor no
es ajustable por el usuario.
DISIPADOR DE CALOR 2 (HEATSINK 2)
Esta pantalla despliega los parmetros relativos al Disipador de
Calor nmero dos. Todos los parmetros se usan de manera
similar a los del Disipador de Calor 1. Refirase a esa seccin
del manual para mayor explicacin de los parmetros. El valor
mostrado en el grfico representa el valor de fbrica para este
sensor de calor. Con excepcin de Habilitar Bloqueo, ninguno de
los valores es ajustable por el usuario.
DISIPADOR DE CALOR 3 (HEATSINK 3)
Esta pantalla despliega los parmetros relativos al Disipador de
Calor nmero tres. Todos los parmetros se usan de manera
similar a los del Disipador de Calor 1. Refirase a esa seccin
del manual para mayor explicacin de los parmetros. El valor
mostrado en el grfico representa el valor de fbrica para este
61
sensor de calor. Con excepcin de Habilitar Bloqueo, ninguno de
los valores es ajustable por el usuario.
DISIPADOR DE CALOR 4 (HEATSINK 4)
Esta pantalla despliega los parmetros relativos al Disipador de
Calor nmero cuatro. Todos los parmetros se usan de manera
similar a los del Disipador de Calor 1. Refirase a esa seccin
del manual para mayor explicacin de los parmetros. El valor
mostrado en el grfico representa el valor de fbrica para este
sensor de calor. Con excepcin de Habilitar Bloqueo, ninguno de
los valores es ajustable por el usuario.
TEMPERATURA DE INDUCTOR (INDUCTOR TEMP)
Esta pantalla despliega los parmetros relativos a la
Temperatura del Inductor. En la familia GCS de controladores de
velocidad variable, el inductor o reactor de enlace se monta
debajo de la bandeja del condensador en el espacio para
aireacin. El sensor de temperatura mismo se monta cerca de
los bobinados para brindar una medicin exacta de la
temperatura. Todos los parmetros se usan de manera similar a
los del Disipador de Calor 1. Refirase a esa seccin del manual
para mayor explicacin de los parmetros. El valor mostrado en
el grfico representa el valor de fbrica para este sensor de
calor. Con excepcin de Habilitar Bloqueo, ninguno de los
valores es ajustable por el usuario.
TEMPERATURA AMBIENTE (AMBIENT TEMP)
Esta pantalla despliega los parmetros relativos a la
Temperatura Ambiente. El sensor de temperatura ambiente est
montado en la tarjeta impresa de circuitos principal del
controlador GCS y en esta posicin mide la temperatura interior
del gabinete del controlador. Todos los parmetros se usan de
manera similar a los del Disipador de Calor 1. Refirase a esa
seccin del manual para mayor explicacin de los parmetros. El
valor mostrado en el grfico representa el valor de fbrica para
este sensor de calor. Con excepcin de Habilitar Bloqueo,
ninguno de los valores es ajustable por el usuario.
62
TEMPERATURA AUXILIAR (AUXILIARY TEMP)
Esta pantalla despliega los parmetros relativos a Temperatura
Auxiliar. Todos los parmetros se usan de manera similar a los
del Disipador de Calor 1. Refirase a esa seccin del manual
para mayor explicacin de los parmetros. La entrada de
temperatura auxiliar difiere de las dems ya que los parmetros
son ajustables por el usuario.
FALLA DE TELEMETRA (TELEMETRY FAIL)
Esta pantalla de alarma brinda acceso a los parmetros
asociados con una alarma de falla de telemetra. Se define que
existe una alarma de Falla de Telemetra cuando un mensaje
vlido destinado a este controlador no se recibe dentro del
perodo de tiempo asociado. Este tipo de alarma puede ser til
cuando el controlador Electrospeed GCS est conectado a un
sistema de telemetra o SCADA y no se debe permitir que la
bomba opere durante una falla de comunicaciones. Por ejemplo,
esta alarma podra ser usada para cerrar un pozo usado como
fuente de agua para alimentar una instalacin de proceso cuando
la comunicacin y/o el sistema de control en esa instalacin
fallan.
Valor Actual (Present Value) Este dato variable despliega el
estado actual de la alarma de Falla de Telemetra. Si este valor
muestra S (YES) y la alarma est habilitada, el controlador
detendr el motor luego que los perodos de demora asociados
hayan expirado. Se considera que una alarma est activa cuando
el controlador no est recibiendo en forma activa un mensaje
para esta unidad o transmitiendo una respuesta a un mensaje
vlido. Por lo tanto, cuando est habilitado, el valor actual
cambiar de S a NO cuando se est comunicando en forma
activa. Los perodos de demora asociados que se describen a
continuacin permiten que el usuario ajuste la cantidad de tiempo
antes que se tome cualquier accin debido a esta alarma.
Habilitar Alarma (Alarm Enable) Este valor controla si esta
alarma de Telemetra har que el controlador pare el motor
cuando ocurra una alarma de comunicaciones.
Habilitar Bloqueo (Lockout Enable) Este valor determina si el
controlador intentar o no un arranque automtico cuando el
motor haya sido parado debido a una alarma de Telemetra. Si
est en S (YES) y ocurre una parada por Alarma de
Telemetra, el controlador se bloquear y evitar todo intento
adicional de arranque.
63
Tiempo a Ignorar (Bypass Delay) Este valor representa el
tiempo en segundos que el controlador esperar en caso de una
Alarma de Telemetra existente luego de un arranque. Si se
ingresa un valor distinto de cero en este parmetro, el
controlador arrancar el motor an mientras exista la alarma. Si
el sistema de comunicaciones est realmente sin operar, esta
situacin no es deseable porque el motor se detendr otra vez en
cuanto las demoras asociadas expiren. En su lugar, use el reloj
Demora para Espera con Alarma para controlar si el controlador
vuelve a arrancar mientras exista una alarma de
comunicaciones.
Demora de Parada (Shutdown Delay) Este parmetro
representa el tiempo en segundos que el controlador permitir
que exista una Alarma de Telemetra antes de detener el motor.
Este tiempo de alarma debera definirse un poco mayor al tiempo
total de ciclo de la computadora principal SCADA. Por ejemplo, si
la computadora SCADA investiga este controlador cada nueve
minutos, la alarma podra definirse en 600 segundos o 10
minutos. Si el sistema principal SCADA no se comunica con este
controlador dentro de este perodo de tiempo, su motor debera
ser detenido automticamente.
Demora para Espera con Alarma (Alarm HldOff Dly) El
parmetro Demora para Espera con Alarma determina si el
controlador permitir que el motor sea arrancado mientras exista
una alarma de telemetra. Si se ingresa un Tiempo a Ignorar en
este parmetro y el sistema de comunicaciones no est
operando, el controlador arrancar el motor y probablemente
slo funcione hasta que expiren las demoras de Tiempo a
Ignorar y Demora de Parada. Esta situacin se repetir y puede
resultar en arranques de motor numerosos e innecesarios que
pueden daarlo. Este parmetro Demora para Espera con
Alarma permite que el controlador escuche y determine si existe
trfico de comunicaciones en el sistema de telemetra. Si existen
mensajes de comunicaciones vlidos, se asume que hay un
sistema de telemetra presente y funcionando, y se permite que
el motor arranque. En este caso, la computadora central SCADA
debe entonces comunicarse con este controlador GCS especfico
dentro del tiempo igual al Tiempo a Ignorar ms la Demora de
Parada para evitar que el motor se detenga. Note que a
diferencia del Tiempo a Ignorar y la Demora de Bloqueo, este
reloj Demora para Espera con Alarma es reactivado por cualquier
trfico de datos, no slo mensajes destinados a esta unidad.
Parmetros Auxiliares de Arranque (Aux Rstrt Parms)
Cuando este parmetro est en S (YES), hace que el
controlador Electrospeed use los parmetros de arranque
enumerados a continuacin cuando genera una parada por
alarma de Falla de Telemetra. Si este parmetro est definido
como NO, el controlador usar los parmetros de arranque
globales cuando realice un arranque automtico. Los parmetros
de arranque globales se establecen a partir de los mens de
configuracin del Electrospeed GCS.
64
Arranques Permitidos (Allowed Starts) Arranques permitidos
controla el nmero de arranques automticos que se permitirn
cuando el controlador haya generado una parada por Falla de
Telemetra y el parmetro Parmetros Auxiliares de Arranque
haya sido definido como S.
Demora de Arranque (Restart Delay) Demora de Arranque
controla la cantidad de tiempo que el controlador esperar antes
de intentar un arranque del motor cuando ste ha sido detenido
debido a Falla de Telemetra y el parmetro Parmetros
Auxiliares de Arranque haya sido definido como S.
CONFIGURACIN DE ALARMAS (ALARM SETUP)
La pantalla de configuracin de alarmas se provee para
comodidad del usuario para que la mayora de las condiciones
de alarma puedan ser activadas o desactivadas en una pantalla.
Estas pantallas de configuracin de alarmas se encuentran en el
grupo de mens FALLAS y ALARMAS.
Undld Alm Enbl Habilitar Alarma de Baja Carga
Ovld Alm Enbl Habilitar Alarma de Sobrecarga
Low Speed Trip Habilitar Alarma de Baja Velocidad
Aux Tmp Alm Enb Alarma de Temperatura Auxiliar
OvrVlt Alm Enbl Alarma de Sobrevoltaje de
Entrada
UndVlt Alm Enbl Alarma de Bajo Voltaje de
Entrada
Vunbal Alm Enbl Alarma de Desbalance de
Voltaje de Entrada
Tel Fail Alm En Habilitar Alarma de Falla de
Telemetra
Estas pantallas de configuracin de Alarmas se encuentras en
las pantallas del men MDULOS GCS / E/S INCORPORADAS.
DI1 Alm Enbl Habilitar Alarma Entrada Digital 1
DI2 Alm Enbl Habilitar Alarma Entrada Digital 2
DI3 Alm Enbl Habilitar Alarma Entrada Digital 3
AI1 Hi Thld Alm Habilitar Alarma Lmite Superior
de Entrada Analgica 1
AI1 Lo Thld Alm Habilitar Alarma Lmite Inferior
de Entrada Analgica 1
AI2 Hi Thld Alm Habilitar Alarma Lmite Superior
de Entrada Analgica 2
AI2 Lo Thld Alm Habilitar Alarma Lmite Inferior
de Entrada Analgica 2
65
FUNCIONES DE LGICA
PROGRAMABLE
(PROGRAMMABLE LOGIC
FUNCTIONS)
El grupo de pantallas de funciones de lgica programable brinda
acceso a las funciones programables del Electrospeed GCS. En
el momento slo se incluyen los Controles de Frecuencia de
Salida como funciones preprogramadas. A medida que las
funciones adicionales se hallen a disposicin, se acceder a ellas
a travs de estos mens. Sin embargo, utilizando funciones de
controlador de Lgica Programable por el Usuario (UPLC en
ingls), se pueden crear distintos tipos de algoritmos de control.
CONFIGURACIN DE FUNCIONES PROGRAMABLES (PROG
FUNCT SETUP)
La pantalla de configuracin de Funciones Programables brinda
acceso a las funciones disponibles.
CONTROL DE FRECUENCIA DE SALIDA (OUTPUT
FREQUENCY CONTROL)
La pantalla de configuracin de Control de Frecuencia de Salida
brinda al usuario tres modos de control de velocidad de salida:
PID, Seguidor Analgico y Valor de Frecuencia. Cuando el
usuario selecciona uno de los tres modos, la parte inferior de la
pantalla cambiar para desplegar los parmetros
correspondientes a ese tipo de algoritmo de control.
Modo de Control (Control Mode) El Modo de Control
determina el algoritmo que controlar la velocidad de salida del
controlador. Cada uno de los tres algoritmos usa un conjunto de
variables que controla su operacin. Seleccione primero el modo
de operacin, y el resto de la pantalla cambiar para desplegar
los parmetros apropiados para ese mtodo de control.
66
Modo de Control: Valor de Frecuencia (FR SET) Cuando el
Electrospeed GCS est operando en modo de valor de
Frecuencia, intentar operar a la frecuencia establecida
programada por el usuario. Varios factores pueden afectar la
capacidad del controlador de lograr esta frecuencia incluyendo el
Lmite de Corriente, el Bloqueo de Alta Velocidad y el Bloqueo de
Baja Velocidad.
Frecuencia Establecida (Set Frequency) Este parmetro
establecido por el usuario es la frecuencia operativa requerida
del controlador. Este valor puede ingresarse tambin por medio
de la pantalla de Configuracin de Espeed GCS 1 y la pantalla
de estatus.
Modo de Control: PID Cuando opera en modo PID, el
controlador intentar variar su frecuencia de salida de manera de
mantener una seal de entrada analgica dada.
Entrada de Valor (Setpoint Input) La entrada de valor
determina el valor de control o seal de entrada que se usar
como el objetivo que el controlador intentar alcanzar y
mantener. Cuando el cursor est en este punto y el usuario
oprime ENTER, aparecer una pantalla con una lista de tems a
seleccionar como se muestra a la izquierda. Use las teclas con
flecha para resaltar el dato de entrada deseado y oprima ENTER.
Las entradas disponibles son:
MN SET (Valor Manual) El controlador variar su
frecuencia de salida para alcanzar este valor de seal de
retroalimentacin. Las unidades de ingeniera ingresadas
aqu deben coincidir con las unidades de la entrada de
retroalimentacin seleccionada.
AI1 (Entrada Analgica 1) El valor a escala y calibrado
de corriente de la seal analgica presente en la Entrada
Analgica 1.
AI2 (Entrada Analgica 2) El valor de corriente calibrada
y a escala de la seal analgica presente en la Entrada
Analgica 2.
X1 AI1, AI2 (Mdulo de Expansin de E/S 1, entrada
Analgica 1 o 2) El valor calibrado de la seal analgica
presente en la entrada analgica 1 o 2 del mdulo de
expansin de E/S 1.
X2 AI1, AI2 (Mdulo de Expansin de E/S 2, entrada
Analgica 1 o 2) El valor calibrado de la seal analgica
presente en la entrada analgica 1 o 2 del mdulo de
expansin de E/S 2.
X3 AI1, AI2 (Mdulo de Expansin de E/S 3, entrada
Analgica 1 o 2) El valor calibrado de la seal analgica
presente en la entrada analgica 1 o 2 del mdulo de
expansin de E/S 3.
Cntl Intake P, T y Mtr T (Centinel) La presin de
entrada, temperatura y temperatura de motor, medidas
con el medidor Centinel en fondo de pozo.
RDCM Dispositivo 1 a Dispositivo 3 con puntos de dato 1
al 12 en cada dispositivo. Estos valores se acceden
67
desde el RDCM que recupera los datos desde
sensores/dispositivos conectados de terceros.
Entrada de Retroalimentacin (Feedback Input) La entrada
de retroalimentacin determina la seal que ser usada como
retroalimentacin al algoritmo de control de PID. Note que el
algoritmo no funcionar apropiadamente si la entrada del valor
configurable y la entrada de retroalimentacin se definen en la
misma entrada analgica. Cuando este rengln de men se
activa, aparecer una pantalla de seleccin de tem similar a la
ilustracin de ms abajo a la izquierda. Use las teclas con flecha
para seleccionar el valor de entrada deseado y oprima ENTER.
Las entradas disponibles son:
AI1 (Entrada Analgica 1) El valor a escala y calibrado
de corriente de la seal analgica presente en la Entrada
Analgica 1.
AI2 (Entrada Analgica 2) El valor a escala y calibrado
de corriente de la seal analgica presente en la Entrada
Analgica 2.
X1 AI1, AI2 (Mdulo de Expansin de E/S 1, entrada
Analgica 1 o 2) El valor calibrado de la seal analgica
presente en la entrada analgica 1 o 2 del mdulo de
expansin de E/S 1.
X2 AI1, AI2 (Mdulo de Expansin de E/S 2, entrada
Analgica 1 o 2) El valor calibrado de la seal analgica
presente en la entrada analgica 1 o 2 del mdulo de
expansin de E/S 2.
X3 AI1, AI2 (Mdulo de Expansin de E/S 3, entrada
Analgica 1 o 2) El valor calibrado de la seal analgica
presente en la entrada analgica 1 o 2 del mdulo de
expansin de E/S 3.
Cntl Intake P, T y Mtr T La presin de entrada,
temperatura y temperatura de motor, medidas con el
medidor Centinel en fondo de pozo.
RDCM Dispositivo 1 a Dispositivo 3 con puntos de dato 1
al 12 en cada dispositivo. Estos valores se acceden
desde el RDCM que recupera los datos desde
sensores/dispositivos conectados de terceros.
Ganancia Integral (Integ Gain) La Ganancia Integral se define
como un valor porcentual (0 al 100%) y representa el
componente de ganancia integral del algoritmo de control de PID.
El valor tpico es de 3%. Cada vez que el algoritmo de control se
actualiza, el valor de la entrada analgica controladora se
compara con el valor definido. La diferencia entre los dos
representa el error. La demanda de velocidad de salida se
aumenta o disminuye en una cantidad proporcional al producto
del error y la Ganancia Integral. En forma sencilla, cuanto ms
grande es el valor del error, o ms alta se define a la ganancia,
mayor ser el cambio.
Ganancia Proporcional (Prop Gain) La Ganancia Proporcional
se define como un valor porcentual (0 al 100%) y representa el
componente de ganancia proporcional del algoritmo de control de
PID. El valor tpico es de 3%. Cada vez que el algoritmo de
68
control PID se vuelve a calcular, se suma o resta a la demanda
de velocidad de salida una cantidad proporcional al producto del
error y la ganancia proporcional. El componente ganancia
proporcional del algoritmo modifica la demanda de velocidad
para acelerar la respuesta del sistema puesto que su valor se
basa en el trmino error instantneo.
Ganancia Derivativa (Deriv Gain) La Ganancia Derivativa se
define como un valor porcentual (0 al 100%) y representa el
componente ganancia derivativa del algoritmo de control de PID.
El valor tpico es 0%. El componente ganancia derivativa se
calcula como el producto de la diferencia entre las dos ltimas
lecturas de entrada analgica (la retroalimentacin). Este
componente disminuir la demanda de velocidad si la diferencia
es negativa y aumentar la demanda de velocidad si la diferencia
es positiva. La ganancia derivativa, por lo tanto, se suma o resta
a la demanda de velocidad para limitar la sobrecorreccin en
sistemas donde es necesaria una respuesta rpida.
Direccin de Controlador (Cntlr Dir) La Direccin de
Controlador controla la polaridad (Accin Directa (FWD) o Accin
Reversa (REV)) en la cual el algoritmo PID aplicar los ajustes
de velocidad. En accin directa, el controlador aumentar su
frecuencia de salida en respuesta a un aumento en el valor
configurado. La accin reversa disminuye la frecuencia de salida
en respuesta a un aumento en el valor configurado.
Valor Manual (Man Stpnt) El Valor Manual despliega el valor
configurado entrado manualmente por el usuario; el Electrospeed
GCS intentar que la entrada de retroalimentacin alcance este
valor. El controlador aumentar (o disminuir) su frecuencia de
salida para intentar cumplir con este objetivo. Si se selecciona
cualquier entrada analgica como el valor configurado, entonces
se despliega aqu el valor de dicha entrada.
Valor Actual de AI1 (AI1 Prsnt Val) El Valor Actual de la
Entrada Analgica 1 despliega el valor actual de la seal
seleccionada como la seal de retroalimentacin al ciclo de
control de PID del controlador. Si se selecciona cualquier otra
entrada analgica como el valor configurado, entonces se
despliega aqu el valor de dicha entrada.
Modo de Control: AN FOL Seguidor Analgico. Cuando se
opera en modo de Control Seguidor Analgico, el controlador
intentar variar su frecuencia de salida entre el Bloqueo de Baja
Velocidad y el Bloqueo de Alta Velocidad en proporcin 0-100%
de la seal de entrada analgica seleccionada.
Entrada de Valor (Setpoint Input) La entrada de valor
determina la seal de entrada que el Electrospeed intentar
seguir. Las entradas disponibles son las mismas que para modo
de control PID pero excluyen el Valor Manual.
Valor Configurable (Setpoint Value) El Valor Configurable
despliega el valor actual de la entrada analgica que se ha
seleccionado como el valor de control.
69
Frecuencia de Salida (Output Freq) La Frecuencia de Salida
despliega la frecuencia de salida que el Electrospeed GCS est
produciendo actualmente.
Modo de Control: FR SWP Modo Barrido de Frecuencia. Este
modo de control de frecuencia se usa para hacer que el
controlador de velocidad variable GCS aumente o disminuya
automticamente su frecuencia de energa de salida entre los
valores de los Bloqueos de Alta Velocidad y de Baja Velocidad,
en intervalos de 0,1 a 15,0 Hz durante un perodo de tiempo de 1
minuto a 96 horas. Al final del cambio o barrido de frecuencia
programado, el controlador GCS revertir automticamente a su
modo de Valor de Frecuencia. Mantendr luego la salida en la
ltima frecuencia alcanzada.
Si ocurre cualquier interrupcin durante un proceso de barrido de
frecuencia que haga que el motor se detenga, el controlador
GCS desactivar el modo de Barrido de Frecuencia y revertir a
un modo de tipo valor de frecuencia. Si el controlador es
arrancado subsecuentemente, la Frecuencia Establecida ser
igual a la ltima frecuencia alcanzada mientras estaba en Modo
Barrido de Frecuencia.
El modo barrido de frecuencia no puede ser activado mientras el
motor est parado. Si el usuario activa el modo Barrido de
Frecuencia mientras el motor est detenido, el sistema lo
desactivar inmediatamente.
Para seleccionar modo Barrido de Frecuencia, mueva el cursor a
la posicin Modo de Control, oprima ENTER, luego oprima las
fechas ARRIBA o ABAJO a travs de los modos de control
disponibles. Cuando se despliegue FR Swp, oprima ENTER otra
vez.
Frecuencia Establecida (Set Frequency): Este parmetro
despliega la frecuencia de salida que es actualmente requerida
por el controlador del sistema.
Frecuencia de Salida (Output Frequency): El parmetro
despliega la frecuencia de salida actual. Esto puede diferir
momentneamente de la Frecuencia Establecida explicada
anteriormente, porque el controlador tiene una demora de
aceleracin y desaceleracin que el usuario puede seleccionar y
no cambia su salida instantneamente.
Frecuencia Objetivo (Target Frequency): Este parmetro
despliega la frecuencia final que el controlador producir cuando
se haya completado la funcin de barrido. Este objetivo puede
ser ms alto o ms bajo que la Frecuencia Establecida actual.
Intervalo de Cambio (Step Change): El parmetro intervalo de
cambio permite que el usuario controle la medida del cambio de
frecuencia. Si se deja en el valor por defecto la medida del
intervalo ser de 0,1 Hz. Para forzar un intervalo de cambio de
70
frecuencia ms grande, ajuste este parmetro hasta un mximo
de 15,0 Hz.
Tiempo (Time): El parmetro tiempo se usa para controlar la
duracin total del perodo de barrido, desde 1 minuto hasta 96
horas.
Activar Barrido de Frecuencia (FR Swp Enable): Cuando se
hayan definido los parmetros, arranque el controlador, y luego
cambie este parmetro a s (yes). En ese momento, el
controlador comenzar a calcular y ejecutar una serie de
cambios de frecuencia de salida. Si este parmetro se cambia a
s mientras el controlador est detenido, el sistema lo cambiar
de vuelta a no.
Cuando se selecciona el modo Barrido de Frecuencia, la pantalla
de ESTATUS del GCS indicar FR SWP en el parmetro MODO.
Cuando se active el barrido, ese indicador se encender y
apagar aproximadamente una vez por segundo. Si el indicador
no est titilando, se ha seleccionado el modo de barrido, pero no
est activado actualmente.
BLOQUE PLC DE USUARIO (USER PLC BLOCK)
El men Bloque PLC de usuario brinda al usuario acceso al
bloque de control de ejecucin que impulsa al controlador de la
funcin de lgica programable. Usando las funciones
suministradas, el usuario puede crear algoritmos exclusivos y a
medida que no estn disponibles como parte del controlador
estndar. La informacin y descripcin provistas en este manual
son breves; sin embargo, el documento titulado Gua de
Aplicacin de Funciones Programables de GCS (GCS
Programmable Functions Application Guide) provee ms detalle.
MODIFICAR BLOQUE PLC (EDIT PLC BLOCK)
La pantalla Modificar Bloque PLC permite al usuario ingresar o
modificar cualquiera de las variables del Bloque PLC. Hay 48
Bloques PLC de Usuario disponibles, numerados del 1 al 48.
Cuando se los nombra dentro de un punto PLC de usuario, los
bloques se identifican con su nmero de direccin de base de
datos, siendo el bloque nmero uno igual a la direccin 99, el
bloque nmero dos igual a la direccin 98, y as sucesivamente.
El ltimo bloque PLC disponible es el bloque nmero 48, en la
direccin 52.
Identificacin de Bloque (Block ID) La variable Identificacin
de Bloque indica el Bloque PLC que est actualmente
desplegado en la pantalla. La ilustracin muestra el Bloque PLC
de Usuario nmero 1 desplegado. Mueva el cursor para resaltar
71
este rengln y oprima las teclas con flecha izquierda/derecha
para desplegar el ltimo/ prximo bloque.
Tipo de Bloque (Block Type) El tipo de bloque PLC de Usuario
determina el tipo de funcin que este bloque realizar. Tipo de
Bloque 5 es de propsito general.
Nodo Requerido (Node Reqd) La variable Nodo Requerido se
reserva para uso futuro.
Seales (Flags) La variable Seales controla la ejecucin del
bloque PLC.
Memoria de Trabajo (Wrkng Strg) Memoria de Trabajo es una
variable usada internamente por el controlador GCS.
Punto Activador (Enblg Pnt) Se usa el Punto Activador para
activar / desactivar la ejecucin del bloque PLC de Usuario que
est configurado como un bloque de control de alarma del
usuario. Ingrese el nmero de Identificacin de Punto de una
cadena de alarma vlida habilitada para activar este bloque PLC.
Cuando la cadena de alarma nombrada se activa, este bloque
PLC de Usuario ser tambin activado y procesado.
Identificacin de Punto 0 (Point ID 0) La identificacin de
punto 0 contiene el nmero de punto de base de datos del
usuario del primer punto a ejecutar. Las entradas vlidas son
desde Identificacin de punto 4095 a Identificacin de punto
3840. La rutina PLC de Usuario ejecutar todos los puntos
listados antes de la Identificacin de punto con un valor cero. Si
existen Identificaciones de punto vlidas en cualquier
Identificacin de punto subsiguiente, no se las ejecutar.
Identificacin de Punto 1 (Point ID 1) La Identificacin de
punto 1 contiene el nmero de punto de base de datos del
usuario del segundo punto a ejecutar. Las entradas vlidas son
desde Identificacin de punto 4095 a Identificacin de punto
3840.
Identificacin de Punto 2 (Point ID 2) La Identificacin de
punto 2 contiene el nmero de punto de base de datos del
usuario del tercer punto a ejecutar. Las entradas vlidas son
desde Identificacin de punto 4095 a Identificacin de punto
3840.
Identificacin de Punto 3 (Point ID 3) La Identificacin de
punto 3 contiene el nmero de punto de base de datos del
usuario del cuarto punto a ejecutar. Las entradas vlidas son
desde Identificacin de punto 4095 a Identificacin de punto
3840.
Identificacin de Punto 4 (Point ID 4) La Identificacin de
punto 4 contiene el nmero de punto de base de datos del
usuario del quinto punto a ejecutar. Las entradas vlidas son
desde Identificacin de punto 4095 a Identificacin de punto
3840.
72
Identificacin de Punto 5 (Point ID 5) La Identificacin de
punto 5 contiene el nmero de punto de base de datos del
usuario del sexto punto a ejecutar. Las entradas vlidas son
desde Identificacin de punto 4095 a Identificacin de punto
3840.
Identificacin de Punto 6 (Point ID 6) La Identificacin de
punto 6 contiene el nmero de punto de base de datos del
usuario del sptimo punto a ejecutar. Las entradas vlidas son
desde Identificacin de punto 4095 a Identificacin de punto
3840.
Identificacin de Punto 7 (Point ID 7) La Identificacin de
punto 7 contiene el nmero de punto de base de datos del
usuario del octavo punto a ejecutar. Las entradas vlidas son
desde Identificacin de punto 4095 a Identificacin de punto
3840.
MODIFICAR PUNTO DE USUARIO (EDIT USER POINT)
El men Modificar Punto de Usuario, en conjunto con los mens
de Bloque PLC de Usuario, brindan acceso a los puntos de base
de datos del usuario usados para realizar clculos y funciones
lgicas.
Identificacin de Punto (Point ID): La variable Identificacin
de Punto se usa para identificar el punto de base de datos que
se est desplegando o modificando. Mueva el cursor a esta
ubicacin y oprima las teclas con flecha izquierda / derecha para
desplegar el punto de base de datos de Usuario previo / prximo.
Oprima la tecla ENTER para que se le permita ingresar el
nmero de punto real de cualquier punto de Usuario. El
controlador GCS tiene 256 puntos de Base de Datos de Usuario
disponibles.
Entrada 0 (Input 0): Esta variable se usa para indicar la
Identificacin del primer punto que ser usado por esta funcin
PLC de Usuario. Este punto puede ser cambiado al nmero de
cualquiera de los puntos de base de datos disponibles en el
controlador GCS y no est limitado a las 256 direcciones de
puntos de base de datos de usuario. Hay una lista completa de
los puntos de base de datos direccionables en la gua de
aplicacin.
Entrada 1 (Input 1): Esta variable se usa para indicar la
Identificacin del segundo punto que ser usado por esta funcin
PLC de Usuario. Este punto puede ser cambiado al nmero de
cualquiera de los puntos de base de datos disponibles en el
controlador GCS y no est limitado a las 256 direcciones de
puntos de base de datos de usuario.
Entrada 2 (Input 2): Esta variable se usa para indicar la
Identificacin del tercer punto que ser usado por esta funcin
PLC de Usuario. Este punto puede ser cambiado al nmero de
cualquiera de los puntos de base de datos disponibles en el
73
controlador GCS y no est limitado a las 256 direcciones de
puntos de base de datos de usuario.
Entrada 3 (Input 3): Esta variable se usa para indicar la
Identificacin del cuarto punto que ser usado por esta funcin
PLC de Usuario. Este punto puede ser cambiado al nmero de
cualquiera de los puntos de base de datos disponibles en el
controlador GCS y no est limitado a las 256 direcciones de
puntos de base de datos de usuario.
Identificacin de Funcin (Funct ID): La variable
Identificacin de Funcin contiene el nmero identificador de la
funcin requerida. Estas funciones estn listadas en la Gua de
Aplicacin de Funciones Programables de GCS.
Valor Actual (Prsnt Val): El parmetro Valor Actual contiene el
valor numrico actual de este punto.
Valor de Fbrica (Fct Dflt): Esta variable contiene el Valor de
Fbrica del este punto de base de datos de usuario.
Mnimo (Minimum): El valor mnimo de este punto de base de
datos de usuario.
Mximo (Maximum): El valor mximo de este punto de base de
datos de usuario.
Campo de bits (Bitfield): La variable campo de bits contiene
un valor codificado de bits que clasifica al punto de base de
datos de acuerdo al valor contenido. Estos valores se listan en la
Gua de Aplicacin de Funciones Programables de GCS.
Memoria de Trabajo (Wrkng Strg) Memoria de Trabajo es una
variable usada internamente por el controlador GCS.
CITIBus Dv Reservada / No implementada en la actualidad.
Exponente (Exponent) La variable exponente define la
ubicacin de la coma decimal en el valor actual de este punto.
Un -1 significa que el valor est dividido por diez, -2 significa
que el valor est dividido por cien.
Unidades (Units) La variable unidades puede usarse para
asignar un nombre al valor representado por el punto.
Stage Reservada / No implementada en la actualidad.
ALARMAS DEFINIDAS POR EL USUARIO (USER DEFINED
ALARMS)
El men Alarmas Definidas por el Usuario brinda acceso a ocho
alarmas configurables. Cualquier nmero de alarmas pueden ser
activadas y usadas para hacer que el motor pare si existen las
condiciones definidas.
74
ALARMA DE USUARIO 1 (USER ALARM 1)
Esta pantalla de men accede a todos los datos que controlan la
Alarma de Usuario 1. Existen en el controlador GCS ocho
cadenas idnticas y asignables de proceso de alarma. Slo se
explica en detalle la Alarma de Usuario 1, puesto que las ocho
alarmas estn configuradas de la misma manera que sta. En la
actualidad, las fuentes de datos de entrada incluyen el medidor
Centinel al fondo de pozo y las lecturas de la unidad Mdulo de
Comunicacin Remota de Datos (RDCM en ingls).
Fuente de Datos (Data Source) Este parmetro selecciona la
fuente de la seal que ser usada en el proceso de la Alarma. El
ejemplo que se muestra ha seleccionado CTNL INTKE como
fuente de datos. Este canal est definido como Entrada de
Presin Centinel (Centinel Intake Pressure en ingls), de ah que
esa leyenda aparezca al final de la pantalla. Cuando se
selecciona una fuente para la entrada de la alarma, aparecer
una pantalla de seleccin de tem similar a la de la izquierda. Use
las teclas con flecha para mover el cursor al punto de datos
requerido y oprima ENTER.
Valor Actual (Present Value) El valor actual de la fuente de
datos se despliega en esta ubicacin.
Tipo de Alarma (Alarm Type) Este parmetro es para
seleccionar el tipo de alarma. Si se selecciona Lmite Superior
(High Threshold), el controlador GCS considerar que la
condicin de alarma est activa cuando el valor actual excede el
lmite establecido. Cuando se selecciona Lmite Inferior (Low
Threshold), la alarma estar activa cuando el valor actual es
menos que el parmetro lmite.
Lmite Superior (High Threshold) Este parmetro contiene el
valor lmite al cual la alarma se activar. Si se selecciona una
alarma de Lmite Inferior, el nombre de este parmetro ser
Lmite Inferior (Low Threshold).
Habilitar Alarma (Alarm Enable) Este valor determina si el
controlador detendr el motor debido a una condicin de Alarma
de Usuario o si la ignorar.
Habilitar Bloqueo (Lockout Enable) Este parmetro determina
si el controlador entrar en una condicin de bloqueo cuando ha
parado el motor. Si este valor est activado y el motor se detiene
debido a la Alarma de Usuario 1, el controlador se bloquear y
evitar todo intento adicional de arranque hasta que la condicin
sea eliminada.
Tiempo a Ignorar (Bypass Delay) Establece el nmero de
segundos que el controlador esperar en caso de una condicin
de Alarma de Usuario 1 que est presente durante el arranque, o
que ocurra durante este tiempo a ignorar.
Demora de Parada (Shutdown Delay) Establece el nmero de
segundos que el controlador esperar en caso de una condicin
75
de Alarma de Usuario 1 que exista mientras el motor est
funcionando, pero slo despus que el reloj de Tiempo a Ignorar
Alarma de Usuario 1 haya expirado.
Parmetros Auxiliares de Arranque (Aux Rstrt Parms) Este
parmetro fuerza al controlador ELECTROSPEED a usar los
parmetros de arranque enumerados a continuacin cuando
genera una parada por condicin de Alarma de Usuario 1. Si este
parmetro est definido como NO, el controlador usar los
parmetros de arranque globales cuando realice un arranque
automtico. Los parmetros de arranque globales se establecen
a partir de los mens de configuracin del ESpeed GCS.
Arranques Permitidos (Allowed Starts) Arranques
permitidos controla el nmero de arranques automticos
permitidos cuando el controlador se ha detenido debido a una
condicin de Alarma de Usuario 1 y el parmetro Parmetros
Auxiliares de Arranque ha sido modificado a S.
Demora de Arranque (Restart Delay) Demora de Arranque
controla la cantidad de tiempo que el controlador esperar antes
de intentar arrancar el motor cuando ste ha sido detenido
debido a una condicin de Alarma de Usuario 1 y el parmetro
Parmetros Auxiliares de Arranque ha sido modificado a S.
ALARMAS DE USUARIO 2 A 8
Las ocho alarmas de Usuario se configuran con el mismo
mtodo. El valor original de fbrica para las ocho alarmas es
desactivado, o inactivo, como se muestra en el grfico de la
izquierda. Refirase a la seccin anterior, Alarma de Usuario 1,
para instrucciones de configuracin. Note que si se debe
desactivar una Alarma de Usuario, slo se debe cambiar el
parmetro Fuente de Datos a blanco y la variable indicar
inactiva (inactv).
PANTALLA DEL USUARIO
(CUSTOM USER SCREEN)
La Pantalla Del Usuario brinda una pantalla de grficos
configurable por el usuario. Los parmetros de otras pantallas de
despliegue pueden copiarse a sta, permitiendo al usuario crear
una pantalla de datos personalizada.
76
MEN DEL USUARIO (CUSTOM USER MENU)
Como se muestra en el grfico a la izquierda, el Men del
Usuario despliega once datos variables. Cada una de las once
lneas puede ser configurada para desplegar cualquier dato
encontrado en el controlador. La configuracin original de fbrica
muestra el valor de los once primeros Puntos de Dato del
Usuario. Para reemplazar estos puntos de dato con otros, use la
funcin del Men de Utilitarios Agregar al Men del Usuario.
Refirase a la seccin Men de Utilitarios para ms informacin
relativa a esta funcin.
SCADA Y SEGURIDAD Y
SISTEMA (SCADA & SECURITY &
SYSTEM)
El grupo de pantallas SCADA y Seguridad y Sistema brinda
acceso a varias opciones de mantenimiento del sistema,
seguridad, y comunicacin incluidas en el Electrospeed GCS.
SISTEMA (SYSTEM)
Esta pantalla brinda acceso a varios parmetros relativos al
mantenimiento global del sistema.
HOA Externo (Ext HOA) Este parmetro, interruptor externo
Manual-Detenido-Automtico (HAND-OFF-AUTO, o HOA en
ingls), controla si el controlador GCS usa sus entradas digitales
incorporadas como entradas de control para un interruptor HOA
montado en forma externa o remota. Cuando este parmetro
est habilitado, las entradas digitales 1 y 2 estn dedicadas a
esta funcin de HOA y no pueden ser utilizadas para entradas de
estatus de propsito general. El estado de estas entradas
determina si el GCS operar en modo Automtico (arranques
automticos) o Manual (slo arranques manuales). La posicin
central o Detenido de este interruptor se interpreta como un
comando manual de parada. Ver operacin bsica para
informacin relativa a los modos de operacin.
Restaurar Valores (Reset Setpoints) Este valor de control
har que el controlador GCS reprograme todos sus parmetros y
valores configurables de vuelta a los valores originales de
fbrica. La funcin inicializar tambin todos los acumuladores
de tiempo de funcionamiento/ parada y contadores de arranques
a cero. Esto se usa generalmente cuando se mueve o reasigna
el controlador para controlar otro motor. Provee un punto
77
conocido y conservador de arranque para configuracin por parte
del usuario.
Actualizar Flash Ahora (Updte Flash Now) El parmetro
Actualizar Flash Ahora instruye al controlador a copiar en forma
inmediata todos sus parmetros, valores de configuracin y otros
valores internos al dispositivo incorporado de almacenamiento no
voltil de memoria flash. Esta funcin slo funcionar
adecuadamente cuando el motor no est en funcionamiento. Si
el motor est funcionando cuando este valor se cambia a S
(YES), el despliegue mostrar error (err) y la memoria no
ser actualizada. El almacenamiento de memoria flash contiene
el programa y cdigo de base de datos as como tambin los
valores de configuracin del usuario. Se usa en el momento de
energizar para verificar, y si es necesario, reemplazar las copias
de software en RAM con respaldo de batera. Cuando la copia en
RAM de los valores configurables es vlida, pero difieren de la
copia en la memoria flash, el controlador actualizar
automticamente la copia de la memoria flash en el momento de
energizar. Si la batera de respaldo de memoria del controlador
ha fallado o est descargada, el usuario puede ejecutar este
comando para preservar su configuracin en el caso de una falla
en el suministro de energa.
Configuracin de RCB (RCB Configuration) La Configuracin
del Panel Conversor Remoto se usa para acceder al men para
configurar paneles de circuitos de control conversores de energa
adicionales. La opcin de men es visible slo cuando la versin
del software de PCM es 9.00 o superior. Resalte este rengln y
oprima ENTER para acceder al men subsiguiente.
CONFIGURACIN DE RCB (RCB SETUP)
La configuracin del Panel Conversor Remoto se usa para
configurar el Electrospeed GCS para usar ms de un panel de
control de conversin de energa si est instalado el software
PCM 9.00 o superior. El uso de mltiples conversores reduce la
cantidad de distorsin armnica que se refleja de vuelta en la
fuente de energa que alimenta al controlador. Comunquese con
el grupo de Tecnologas de Control de Centrilift para
disponibilidad y refirase al APNDICE J para ms informacin.
Tipo de RCB (RCB Type) El tipo de Panel Conversor Remoto
puede ser definido como MAESTRO (mstr) o REMOTO (rmt).
Slo se permite un panel Conversor MAESTRO por controlador.
El ajuste de estos valores requiere acceso de nivel de seguridad
servicio en el campo.
Direccin de RCB (RCB Address) La direccin del Panel
Conversor Remoto se puede definir de 1 a 4. Se pueden
direccionar hasta 4 paneles conversores remotos.
ltima Direccin de RCB (RCB Last Address) El nmero ms
alto de direccin de panel remoto instalado.
78
IA, IB e IC de Salida (Output IA IB & IC) Se despliega la
corriente de salida del controlador en las tres fases.
IA, IB e IC del RCB 2 (RCB 2 IA IB & IC) Se muestran en estas
variables las corrientes de entrada en las tres fases del panel
conversor remoto nmero 2.
IA, IB e IC del RCB 3 (RCB 3 IA IB & IC) Se muestran en estas
variables las corrientes de entrada en las tres fases del panel
conversor remoto nmero 3.
IA, IB e IC del RCB 4 (RCB 4 IA IB & IC) Se muestran en estas
variables las corrientes de entrada en las tres fases del panel
conversor remoto nmero 4.
Nmero de Revisin de Software (Software Rev Num) Se
listan en esta pantalla de men los niveles de revisin de
software de los mdulos GCS conectados en este sistema de
control. Resalte este rengln y oprima ENTER para acceder al
men subsiguiente.
REVISIN DE SOFTWARE (SOFTWARE REV NUM)
Se listan en esta pantalla los niveles de revisin de todos los
mdulos instalados en este controlador GCS. El nivel de revisin
del PCM SW o Software del Mdulo de Conversin de Energa
puede controlar la disponibilidad de algunas funciones tales
como panel conversor remoto / controladores de mltiples
gabinetes. Refirase a la seccin de Configuracin de RCB
previamente descrita o al Apndice J para ms informacin.
Idioma del Sistema (System Language) El controlador GCS
puede soportar otros idiomas adems de ingls en la pantalla de
despliegue. En este momento, ruso es el nico idioma alternativo
disponible. Siempre que se seleccione un idioma alternativo, la
seccin de seleccin de Idioma del Sistema se mostrar siempre
en ingls como se ilustra a continuacin.
79
Luces Externas (External Lights) Este parmetro controla
cuntas de los rels digitales de salida incorporados se utilizan
con el modo de luces externas. Si se cambia a tres, todos los
rels se usan para anunciar el estado del motor conectado de
acuerdo a las reglas definidas en la seccin de este manual,
LUCES DE PANEL ROJA, MBAR Y VERDE.
CONFIGURACIN DE SCADA (SCADA SETUP)
El men CONFIGURACIN DE SCADA agrupa los parmetros
relacionados que controlan las comunicaciones con los sistemas
de computadoras externas y los dispositivos de telemetra.
Oprima la tecla de FLECHA derecha desde el men de
SISTEMA para acceder a este men.
Protocolo de Comunicaciones (Com Protocol) El Protocolo
de Comunicaciones permite al usuario seleccionar el lenguaje de
comunicacin que el controlador usar para comunicarse
electrnicamente con los sistemas de telemetra y computadoras.
El valor tpico es MODBUS
TM
RTU
A partir de esta revisin de software, la seleccin de protocolo
puede cambiarse a ICM Em. Este valor har que el GCS soporte
el mapa de direcciones MODBUS que se encuentra en el
controlador ICS de velocidad variable de la generacin anterior
cuando est equipado con el mdulo de comunicacin ICM.
Refirase a la tabla de direcciones de registro MODBUS
TM
en el
documento Soporte de Protocolo GCS Modbus (GCS Modbus
Protocol Support) para obtener informacin detallada.
Velocidad en Baudios (Baud Rate) La velocidad en baudios
establece la velocidad de la comunicacin seriada con los
sistemas de telemetra y computadoras. Las velocidades
soportadas son de 1200 a 9600 baudios.
La configuracin de comunicaciones seriada es Sin Paridad, 1
Arranque, 1 Parada, 8 Bits de Datos
Direccin de Rtu (Rtu Address) La Direccin de Unidad de
Terminal Remota (Rtu en ingls) es la variable que asigna un
nmero de 1 a 255 a este controlador con el propsito de
identificarse dentro de una red de comunicaciones.
Demora Preclave (PreKey Delay) La Demora Preclave
implementa un reloj de demora tipo Oprimir para Hablar (Push
to Talk) o Pedir para Enviar (Request to Send o RTS) que se
usa para afirmar la salida RTS en el Puerto de Comunicaciones
RS-232 durante un tiempo especificado por el usuario antes de
comenzar la transmisin seriada de datos. Esta seal y/o demora
se usa comnmente para conectar (handshake) o sincronizar
dos dispositivos de comunicaciones. En sistemas de radio
bidireccionales, se puede usar este RTS como la seal
80
Micrfono/Transmitir para activar al transmisor de radio antes
de la salida seriada de datos.
Demora Entre Caracteres (Intrchr Delay) La demora entre
caracteres es una variable definida por el usuario que controla la
demora permitida entre caracteres seriados adyacentes de un
mensaje activo.
Parada Central (Centl Shutdown) Parada Central es una
variable de estado del sistema que se dedica a anunciar la
presencia de un comando de parada de motor de PLC de
Usuario o SCADA. Cuando esta variable se cambia a cualquier
valor distinto de cero, el controlador detendr al motor si est
funcionando e inhibir todo intento posterior de arranque hasta
que se inicialice. Aunque esta variable puede ser inicializada en
forma local, tenga cuidado si lo hace, puesto que otra persona o
proceso de control puede requerir y depender de que esta unidad
permanezca detenida.
Conexin de Hardware (HW Handshake) La Conexin
(Handshake) de Hardware es una variable de tres estados que
controla el tipo de sincronizacin de comunicaciones que se usa
en el puerto RS-232.
Los valores posibles son: ninguno, RTS o R/CTS.
Ninguno (None) selecciona un valor de puerto de
comunicacin seriada de tres cables, (RX, TX, GND).
RTS selecciona un valor de puerto de comunicacin
seriada de cuatro cables, (RX, TX, RTS, GND). Cuando
RTS est activo, mientras est transmitiendo, el
controlador afirmar la lnea de seal RTC durante un
perodo de tiempo igual al valor establecido en el
parmetro Demora Preclave descrito anteriormente.
Luego que esta demora haya expirado, se transmitirn
los datos.
R/CTS selecciona un valor de puerto de comunicacin
seriada de cinco cables, (RX, TX, RTS, CTS, GND).
Mientras RTS/CTS est activo, cuando est
transmitiendo, el controlador afirmar la lnea de seal
RTS y esperar hasta que la lnea CTS sea tambin
afirmada por el mdem externo. Una vez que la lnea
CTS est afirmada, entonces el controlador GCS
transmitir sus datos.
Estadsticas de Comunicaciones de SCADA (SCADA Com
Stats) Mueva el cursor a este rengln del men y oprima
ENTER para ver la pantalla de estadsticas de comunicaciones.
Refirase a la seccin ESTADSTICAS DE COMUNICACIONES
SCI a continuacin para un una pantalla de ejemplo y su
descripcin.
Seguridad Activa Para SCADA (Scty Enbld Fr S) Este
parmetro controla si se debe ingresar una contrasea vlida
81
antes de permitir que un sistema SCADA modifique parmetros o
arranque/detenga el motor. Si se cambia a no, se toma accin
sobre los mensajes del sistema SCADA haciendo caso omiso del
estatus de Seguridad. Si se lo cambia a si (yes), se debe
ingresar una contrasea vlida de nivel 2 antes de que el sistema
SCADA pueda hacer cualquier cambio al sistema. La contrasea
puede ingresarse en forma manual desde la unidad de
despliegue o a travs del sistema SCADA.
SCADA Slo Lee (SCADA Is Rd Onl) Este parmetro se usa
para controlar si el sistema SCADA ser autorizado para
modificar (grabar) parmetros. Cuando se cambia a S (YES), el
sistema SCADA est autorizado a leer los valores de los
parmetros, pero no puede modificar ninguno de ellos. El Modo
SCADA SLO LEE no est afectado por las contraseas de la
seguridad del sistema.
Estado RTS (RTS State) Cuando el parmetro Conexin de
Hardware se cambia a Ninguno, esta lnea de men aparece y
permite al usuario forzar la lnea de seal RTS a estado Marca
(Mark) o Espacio (Space). Esta lnea de seal RTS puede usarse
entonces para suministrar a dispositivos de comunicaciones
alimentados por el puerto tales como los transmisores
infrarrojos o las interfases RS-485/422. El estado Espacio
producir aproximadamente +7.75VCC a hasta 20mA. El estado
Marca produce
-8.5VCC con la misma corriente que el estado Espacio.
ESTADSTICAS DE COMUNICACIONES SCI (SCI COM
STATS)
Esta pantalla despliega informacin relativa a la operacin de los
registros de control y memorias intermedias (buffers) de
comunicaciones. Es til para diagnosticar las comunicaciones
seriadas con el equipo de telemetra. Despliega acumuladores
para varios errores y contadores de mensajes as como los
primeros 24 octetos de las memorias temporarias de transmisin
y recepcin. Los contenidos de las memorias pueden ser
congeladas/ liberadas temporalmente oprimiendo la tecla
ENTER. Esto permite que el usuario examine un nico
intercambio de mensajes.
ESTADSTICAS DE COMUNICACIONES CIM (CIM COM
STATS)
Esta pantalla despliega las estadsticas de comunicaciones
asociadas con el Mdulo de Interfaz Centinel (CIM en ingls).
Este mdulo opcional es una herramienta de medicin en fondo
de pozo que puede ser conectado como mdulo esclavo de un
controlador GCS. Cuando se instala y activa una unidad CIM, la
pantalla desplegar estadsticas asociadas con la telemetra
entre el Mdulo de Interfaz Centinel y la herramienta en el fondo
de pozo.
82
SEGURIDAD (SECURITY)
Este men accede a las funciones de seguridad del sistema del
Electrospeed GCS. Oprima la tecla con FLECHA derecha en el
men de CONFIGURACIN DE SCADA para llegar a esta
pantalla.
Contrasea de Usuario (User Password) Este parmetro,
CONTRASEA DE USUARIO, contiene la contrasea de
seguridad del usuario. Se puede entrar aqu o por medio de la
pantalla de CONFIGURACIN DE ESpeed GCS.
Contrasea de Nivel 1 (Level 1 Pswd) La contrasea de nivel
uno es el valor que debe ingresarse en el parmetro
CONTRASEA DE USUARIO para obtener acceso de
modificacin a la mayora de los valores de configuracin. Si la
contrasea del usuario no es igual a sta, esta variable
desplegar XXXXX.
Contrasea de Nivel 2 (Level 2 Pswd) La contrasea de nivel
dos es el valor que debe ingresarse en el parmetro
CONTRASEA DE USUARIO para obtener acceso de
modificacin a todos los valores y variables de configuracin del
sistema. Si la contrasea del usuario no es igual a sta, esta
variable desplegar XXXXX.
Contrasea para Eliminar Bloqueo (Pswd To Clr Lk) Este
parmetro controla si se debe ingresar una contrasea vlida
antes que se permita al usuario eliminar una condicin de
bloqueo y arrancar el motor.
Tiempo de Expiracin de Contrasea (User Pswd T.O.) Este
parmetro define la cantidad de tiempo luego de haber oprimido
cualquier tecla para que el Electrospeed GCS cambie la
contrasea de usuario de vuelta a cero.
Estatus de Salto de Seguridad (Security Jmp St) Este
parmetro muestra si el dispositivo de salto de seguridad de
servicio en el campo de Centrilift ha sido instalado.
83
HORA ACTUAL (CURRENT TIME)
Esta pantalla despliega los valores actuales del reloj en tiempo
real con respaldo de batera que opera en el sistema GCS. El
objetivo primario del reloj es poder registrar las fechas y horas de
la Historia de Paradas y las funciones de registro de datos. El
reloj en tiempo real de GCS cumple con los requerimientos del
AO 2000, no ocurrirn problemas relacionados con hora o
fecha.
Note el valor de la Alarma de Hora Invlida. Esta alarma anuncia
que el reloj en tiempo real no contiene datos vlidos. Si esta
alarma est activa, use la pantalla DEFINIR HORA para ingresar
la hora y fecha correctas y esta alarma se inactivar.
DEFINIR HORA (SET TIME)
Esta pantalla brinda acceso a los valores de hora y fecha del
reloj en tiempo real del sistema GCS. Este reloj debera ser
cambiado a la hora y fecha actuales si la batera incorporada ha
sido cambiada o desconectada por cualquier motivo.
Ao (Year) El ao actual, vara de 1996 a 2035.
Mes (Month) El mes actual, vara de 1 a 12.
Da (Day) El da actual, vara de 1 a 31.
Horas (Hours) La hora actual, vara de 0 a 23.
Minutos (Minutes) Los minutos actuales, vara de 0a 59.
Segundos (Seconds) Los segundos actuales, vara de 0 a 59.
Actualizar Hora (Update Tm) Cuando todas las variables de
tiempo han sido cambiadas a la hora actual, cambie este
parmetro a S (YES) para guardar la nueva hora y actualizar
el reloj del sistema GCS.
84
CONFIGURACIN Y DESPLIEGUE
ANALGICOS (ANALOG SETUP
& DISPLAY)
La pantalla de Configuracin Analgica permite desplegar las
lecturas de corriente y voltaje de salida as como tambin ajustar
los voltajes de entrada.
CONFIGURACIN ANALGICA (ANALOG SETUP)
Corriente de Salida A (Output Current A) Corriente de salida
A es el valor actual escalado de la corriente elctrica de salida en
fase A del sistema de energa polifsico.
Corriente de Salida B (Output Current B) Corriente de salida
B es el valor actual escalado de la corriente elctrica de salida en
fase B del sistema de energa polifsico.
Corriente de Salida C (Output Current C) Corriente de salida
C es el valor actual escalado de la corriente elctrica de salida en
fase C del sistema de energa polifsico.
Voltaje de Salida (Output Voltage) Voltaje de Salida despliega
el valor actual del voltaje de CA disponible en las terminales de
salida del controlador.
Voltaje de Entrada AB (In Voltage AB) El Voltaje de Entrada
AB despliega el nivel de voltaje eficaz (RMS) de CA fase a
fase presente a travs de las terminales de entrada de fase A y B
del controlador. Estas lecturas de voltaje pueden ser escaladas.
Voltaje de Entrada BC (In Voltage BC) El Voltaje de Entrada
BC despliega el nivel de voltaje eficaz (RMS) de CA fase a
fase presente a travs de las terminales de entrada de fase B y C
del controlador. Estas lecturas de voltaje pueden ser escaladas.
Voltaje de Entrada CA (In Voltage CA) El Voltaje de Entrada
CA despliega el nivel de voltaje eficaz (RMS) de CA fase a
fase presente a travs de las terminales de entrada de fase C y A
del controlador. Estas lecturas de voltaje pueden ser escaladas.
85
MDULOS GCS (GCS MODULES)
La pantalla MDULOS GCS brinda acceso a los submens que
proveen control de los parmetros de configuracin relacionados
con todos los Mdulos de Entrada/ Salida, ya sean incorporados
(a bordo) o tarjetas de expansin opcionales montadas en forma
externa. Para seleccionar las pantallas de configuracin de E/S
incorporada, use las teclas con flecha para mover la barra de
cursor sobre el rengln de men de E/S incorporada como se
muestra ms abajo y oprima la tecla ENTER. El GCS desplegar
la primera de las pantallas de configuracin para la E/S
incorporada. Para acceder a las otras pantallas de configuracin,
mueva el cursor sobre el rengln de men deseado y oprima
ENTER para desplegar dicha pantalla.
E/S INCORPORADA (ONBOARD I/O)
El men Entrada/ Salida Incorporada brinda acceso a las
pantallas de configuracin para la E/S incorporada. stas
consisten de dos entradas analgicas de 0-10 voltios CC y tres
entradas digitales (estatus). La primera pantalla que se muestra
ser normalmente la de Entrada Analgica Interna 1, como se ve
en la prxima ilustracin.
ENTRADA ANALGICA INTERNA 1 (INTERNAL ANALOG
INPUT 1)
Esta pantalla de men accede a todos los parmetros
relacionados con la seal de 0-10 VCC aplicada a la terminal no.
1 de entrada analgica.
Valor Actual (Present Value) El nmero desplegado
representa el valor actual escalado de la seal analgica
presente en la terminal no. 1 de entrada analgica.
Rango y Configuracin (Span & Cfg) Este parmetro se usa
para seleccionar el rango de la entrada analgica (lectura
mxima con entrada mxima), la ubicacin de la coma decimal
(dividir por 10, 100 o 1000) y las unidades de ingeniera (psi,
amperes, voltios, etc.). Mueva el cursor para resaltar este
parmetro y oprima la tecla ENTER. El cursor de resalte
cambiar para aparecer como se ve en la ilustracin de la
izquierda. En este momento, use las teclas con flecha izquierda/
derecha para mover la coma decimal a la izquierda o derecha
segn se requiera, y luego oprima ENTER otra vez. El cursor
cambiar para resaltar el rango mximo de la entrada analgica.
Use las teclas con flecha arriba/abajo o izquierda/derecha para
ajustar el rango al valor requerido, luego oprima ENTER otra vez.
El cursor cambiar una vez ms y permitir al usuario
seleccionar las unidades de ingeniera aplicables a la entrada
analgica. En este momento use las teclas con flecha
arriba/abajo para desplazarse por la lista de unidades de
ingeniera disponibles hasta que aparezca la que se desea, luego
oprima ENTER para finalizar la configuracin.
86
Tipo de Instrumento (Instrument Typ) Permite la seleccin
del tipo de seal conectada a la entrada analgica. Los tipos de
instrumentos son 0-10Vcc, 0-5Vcc, 4-20mA, y 10-50mA. Para
usar el tipo de circuito actual (4-20mA / 10-50mA), se debera
conectar un resistor de la medida adecuada en paralelo con la
entrada analgica para convertir la seal en un voltaje. Por
ejemplo, use un resistor de 500 ohm para convertir 4-20mA en 2-
10 Vcc. Luego cambie el tipo a 4-20mA, y el controlador realizar
los clculos de desplazamiento requeridos.
Desplazamiento (Offset) Use este parmetro para sumar o
restar un valor de desplazamiento al valor analgico actual
escalado.
Configuracin de Lmite Superior (Hi Thld Setup) Este men
accede a los parmetros asociados con una alarma de lmite
superior en la entrada analgica 1. Resalte este rengln y oprima
ENTER para acceder al men subsiguiente.
Configuracin de Lmite Inferior (Lo Thld Setup) Este men
accede a los parmetros asociados con una alarma de lmite
inferior en la entrada analgica 1. Resalte este rengln y oprima
ENTER para acceder al men subsiguiente.
CONFIGURACIN DE LMITE SUPERIOR (HIGH THRESHOLD
SETUP)
Lmite Superior (High Threshold) Establece el valor del lmite
superior de la entrada analgica no. 1 que en caso de excederse
ocasionar la parada del motor.
Habilitar Alarma de Lmite Superior (Hi Thld Alm Enb) Este
parmetro determina si el controlador GCS detendr el motor
cuando el Valor Actual de la entrada analgica nmero 1
exceda el valor del Lmite Superior.
Habilitar Bloqueo de Lmite Superior (Hi Thld Lk Enbl) Este
parmetro determina si el controlador se bloquear y evitar
todo intento posterior de arranque automtico cuando el GCS
pare el motor debido a una alarma de Lmite Superior.
Tiempo a Ignorar Lmite Superior (Hi Thld Byp Dly) Este
parmetro establece el nmero de segundos que el controlador
GCS esperar en caso de una condicin de alarma de Lmite
Superior que est presente en el momento de arranque.
Demora de Parada de Lmite Superior (Hi Thld Sd Dly) Este
parmetro establece el nmero de segundos que el controlador
esperar en caso de una condicin de alarma de Lmite Superior
que exista mientras el motor est funcionando pero slo despus
que el reloj de Tiempo a Ignorar Lmite Superior haya expirado.
Parmetros Auxiliares de Arranque (Aux Rstrt Parms)
Cuando este parmetro est en S (YES), el controlador
Electrospeed est forzado a usar los parmetros de arranque
enumerados a continuacin cuando genera una parada por
87
alarma de Lmite Superior de Entrada Analgica 1. Si este
parmetro est definido como NO, el controlador usar los
parmetros de arranque globales cuando realice un arranque
automtico. Los parmetros de arranque globales se establecen
a partir de los mens de configuracin del Electrospeed GCS.
Arranques Permitidos (Allowed Starts) Arranques permitidos
controla el nmero de arranques automticos que se permitirn
cuando el controlador haya generado una parada por alarma de
Lmite Superior de Entrada Analgica 1y el parmetro
Parmetros Auxiliares de Arranque haya sido definido como S.
Demora de Arranque (Restart Delay) Demora de Arranque
controla la cantidad de tiempo que el controlador esperar antes
de intentar un arranque del motor cuando ste ha sido detenido
debido a una alarma de Lmite Superior de Entrada Analgica 1y
el parmetro Parmetros Auxiliares de Arranque haya sido
definido como S.
CONFIGURACIN DE LMITE INFERIOR (LOW THRESHOLD
SETUP)
Lmite Inferior (Low Threshold) Establece el valor del lmite
inferior de la entrada analgica; en caso que el valor actual caiga
por debajo de este lmite el motor ser detenido.
Habilitar Alarma de Lmite Inferior (Lo Thld Alm Enb) Este
parmetro determina si el controlador GCS detendr el motor
cuando el Valor Actual caiga por debajo del valor del Lmite
Inferior.
Habilitar Bloqueo de Lmite Inferior (Lo Thld Lk Enbl) Este
parmetro determina si el controlador se bloquear y evitar
todo intento posterior de arranque automtico cuando el GCS
pare el motor debido a una alarma de Lmite Inferior.
Tiempo a Ignorar Lmite Inferior (Lo Thld Byp Dly) Este
parmetro establece el nmero de segundos que el controlador
GCS esperar en caso de una condicin de alarma de Lmite
Inferior que est presente en el momento de arranque.
Demora de Parada de Lmite Inferior (Lo Thld Sd Dly) Este
parmetro establece el nmero de segundos que el controlador
esperar en caso de una condicin de alarma de Lmite Inferior
que exista mientras el motor est funcionando pero slo despus
que el reloj de Tiempo a Ignorar Lmite Inferior haya expirado.
Parmetros Auxiliares de Arranque (Aux Rstrt Parms)
Cuando este parmetro est en S (YES), el controlador
Electrospeed est forzado a usar los parmetros de arranque
enumerados a continuacin cuando genera una parada por
alarma de Lmite Inferior de Entrada Analgica 1. Si este
parmetro est definido como NO, el controlador usar los
parmetros de arranque globales cuando realice un arranque
automtico. Los parmetros de arranque globales se establecen
a partir de los mens de configuracin del Electrospeed GCS.
88
Arranques Permitidos (Allowed Starts) Arranques permitidos
controla el nmero de arranques automticos que se permitirn
cuando el controlador haya generado una parada por alarma de
Lmite Inferior de Entrada Analgica 1 y el parmetro Parmetros
Auxiliares de Arranque haya sido definido como S.
Demora de Arranque (Restart Delay) Demora de Arranque
controla la cantidad de tiempo que el controlador esperar antes
de intentar un arranque del motor cuando ste ha sido detenido
debido a una alarma de Lmite Inferior de Entrada Analgica 1 y
el parmetro Parmetros Auxiliares de Arranque haya sido
definido como S.
ENTRADA ANALGICA INTERNA 2 (INTERNAL ANALOG
INPUT 2)
Esta pantalla de configuracin se accede oprimiendo la tecla con
flecha derecha mientras se despliega la pantalla de ENTRADA
ANALGICA INTERNA 1. Esta segunda entrada analgica se
calibra y opera exactamente de la misma manera que la
ENTRADA ANALGICA INTERNA 1; sin embargo, todas las
lecturas y valores de configuracin se basan en la seal
analgica conectada a la terminal de entrada analgica nmero
2. La configuracin de los valores se explica en ms detalle en la
seccin anterior, ENTRADA ANALGICA INTERNA 1.
ENTRADA DIGITAL INTERNA 1 (INTERNAL DIGITAL INPUT
1)
Esta pantalla de men brinda acceso a todos los parmetros
relacionados con la seal digital de estado (encendido /
apagado) aplicada a la terminal de entrada digital nmero 1. Las
entradas digitales son activadas conectando la terminal de
entrada a la terminal Digital Comn de Tierra provista en el
mismo bloque terminal.
Si el parmetro HOA Externo est habilitado, la Entrada Digital 1
est dedicada para funcionar como un interruptor de botn para
ARRANQUE y no est disponible para uso de propsito general.
Estado Actual (Present Status) El nmero desplegado a la
derecha de esta leyenda representa la condicin actual de la
seal de estado presente en la terminal digital de entrada
nmero 1. Un circuito abierto en la terminal 1 produce un valor de
estatus de 1 (uno). Si el interruptor o sensor conectado entre la
entrada y la Tierra Comn se cierra, el valor de estatus de
entrada digital cambia a 0 (cero). Este es el estado de alarma
activa original de fbrica y puede clasificarse tambin como
Abierto a Alarma.
Estado de Alarma Activa (Active Alarm ST) El parmetro
Estado de Alarma Activa permite que el usuario seleccione si
esta entrada digital se considera en estado de alarma cuando la
entrada es uno o cero. Cambie esta variable al estado digital de
entrada (uno o cero) que ser considerado el estado de alarma.
Cuando el Valor Actual de la entrada digital coincida con el valor
89
de este parmetro, la alarma se activa, y si est habilitada,
causar una parada.
Habilitar Alarma (Alarm Enable) Determina si el controlador
GCS detendr el motor cuando el Estado Actual de la entrada
digital sea igual al Estado de Alarma Activa.
Habilitar Bloqueo (Lockout Enabled) Determina si el
controlador se bloquear y evitar todo intento posterior de
arranque automtico cuando el GCS pare el motor debido a una
alarma de entrada Digital 1.
Tiempo a Ignorar (Bypass Delay) Establece el nmero de
segundos que el controlador GCS esperar en caso de una
condicin de alarma de entrada Digital 1que est presente en el
momento de arranque.
Demora de Parada (Shutdown Delay) Establece el nmero de
segundos que el controlador esperar en caso de una condicin
de alarma de entrada Digital 1 que exista mientras el motor est
funcionando pero slo despus que el reloj de Tiempo a Ignorar
entrada Digital 1 haya expirado.
Parmetros Auxiliares de Arranque (Aux Rstrt Parms)
Cuando este parmetro est en S (YES), el controlador
Electrospeed est forzado a usar los parmetros de arranque
enumerados a continuacin cuando genera una parada por
alarma de entrada Digital Interna 1. Si este parmetro est
definido como NO, el controlador usar los parmetros de
arranque globales cuando realice un arranque automtico. Los
parmetros de arranque globales se establecen a partir de los
mens de configuracin del ESpeed GCS.
Arranques Permitidos (Allowed Starts) Arranques permitidos
controla el nmero de arranques automticos que se permitirn
cuando el controlador haya generado una parada por alarma de
Entrada Digital Interna 1y el parmetro Parmetros Auxiliares de
Arranque haya sido definido como S.
Demora de Arranque (Restart Delay) Demora de Arranque
controla la cantidad de tiempo que el controlador esperar antes
de intentar un arranque del motor cuando ste ha sido detenido
debido a una alarma de Entrada Digital Interna 1 y el parmetro
Parmetros Auxiliares de Arranque haya sido definido como S.
90
ENTRADA DIGITAL INTERNA 2 (INTERNAL DIGITAL INPUT
2)
Esta pantalla de men brinda acceso a todos los parmetros
relacionados con la seal digital de estado (encendido /
apagado) aplicada a la terminal de entrada digital nmero 2. Las
entradas digitales son activadas conectando la terminal de
entrada a la terminal Digital Comn de Tierra provista en el
mismo bloque terminal. Todos los parmetros de esta pantalla
funcionan de manera similar a los de Entrada Digital nmero 1.
Refirase a esa seccin para detalles. Si el parmetro HOA
Externo est habilitado las Entradas Digitales 2 (Automtico) y 3
(Manual) estn dedicadas a esta funcin y no estn disponibles
para uso de propsito general.
ENTRADA DIGITAL INTERNA 3 (INTERNAL DIGITAL INPUT
3)
Esta pantalla de men brinda acceso a todos los parmetros
relacionados con la seal digital de estado (encendido /
apagado) aplicada a la terminal de entrada digital nmero 3. Las
entradas digitales son activadas conectando la terminal de
entrada a la terminal Digital Comn de Tierra provista en el
mismo bloque terminal. Todos los parmetros de esta pantalla
funcionan de manera similar a los de Entrada Digital nmero 1.
Refirase a esa seccin para detalles. Si el parmetro HOA
Externo est habilitado las Entradas Digitales 2 (Automtico) y 3
(Manual) estn dedicadas a esta funcin y no estn disponibles
para uso de propsito general.
SALIDAS DIGITALES INTERNAS 1, 2 Y 3 (INTERNAL DIGITAL
OUTPUT 1, 2 AND 3)
Si el valor de configuracin Luces Externas que se encuentra en
el men SISTEMA se establece en menos de tres, entonces este
men ser visible. Este men permite acceso directo del usuario
a los rels de salida digital, cuando los mismos estn
configurados como salidas de propsito general. Cuando se los
configura como tales, estos rels pueden ser usados por
programas PLC del Usuario.
91
MDULO DE EXPANSIN DE E/S 1 (EXPANSION I/O
MODULE 1)
MDULO DE EXPANSIN DE E/S 2
MDULO DE EXPANSIN DE E/S 3
Estos mens brindan acceso a los parmetros relacionados con
mdulos instalados tales como tarjetas de expansin de
entrada/salida. Por favor lea las descripciones de mens y
parmetros en el manual del operador suministrado con el
mdulo aplicable.
Estado de los Mdulos GCS (GCS Modules Status) La
pantalla Estado de Mdulos GCS permite al usuario habilitar
mdulos de expansin conectados al bus de comunicaciones
CITIBus.
ESTADO DE MDULOS (MODULES STATUS)
Esta pantalla de men muestra cules mdulos de expansin
disponibles estn habilitados para comunicar en la red CITIBus.
Mueva el cursor de realce a los renglones disponibles y oprima
ENTER para habilitar dicho mdulo.
Controlador del Sistema (System Cntlr) El controlador del
sistema est siempre habilitado.
PCM El Mdulo de Conversin de Energa est habilitado
cuando est configurado como controlador de velocidad Variable.
Mdulo Centinel (Centinel Module) Habilitado si hay un
mdulo de mediciones Centinel GCS en fondo de pozo
conectado. Para ms informacin refirase al manual del
Operador del Centinel.
Comunicacin de Datos Remotos (Remote Data Com)
Habilitado si hay un RDCM conectado. Para ms informacin
refirase al manual del Operador del Mdulo de Comunicacin
de Datos Remotos.
EIO1, EIO2, EIO3 Los mdulos de expansin de Entrada /
Salida 1, 2 y 3 pueden ser agregados y habilitados.
92
EXPANSIN Y OPCIONES
El controlador Electrospeed GCS puede ser conectado a una
variedad de mdulos de expansin o sensores opcionales. La
informacin descrita aqu es de naturaleza muy breve. Si se
requieren ms datos, por favor refirase a la documentacin
suministrada con los dispositivos individuales.
CENTINEL
El mdulo Centinel GCS est disponible como una unidad
independiente compatible con GCS o como mdulo de expansin
opcional para el controlador Electrospeed GCS. Cuando se lo
utiliza como dispositivo de expansin, el Trident ser configurado
y sus datos sern desplegados en la misma unidad de
despliegue grfico usada para el controlador. La unidad de
sistema Centinel se instala en el gabinete del Electrospeed y se
integra al Sistema de Control Grfico simplemente conectando el
cable de datos CITIBus desde el controlador al Centinel y
finalmente a la unidad de despliegue grfico. De esta manera, el
controlador es capaz de leer los datos de fondo de pozo desde el
Centinel.
MDULO DE COMUNICACIN DE DATOS REMOTOS
(RDCM)
El Mdulo de Comunicacin de Datos Remotos es un mdulo de
expansin para el controlador GCS que brinda una interfaz entre
el controlador y dispositivos de terceros compatibles con
Modbus. El RDCM est configurado para pedir (poll) a los
esclavos MODBUS los datos especificados por el usuario y a su
vez pone esos datos a disposicin del sistema de control GCS.
Puesto que los datos recuperados se mantienen en formato
digital durante todo el proceso, no hay prdida de fidelidad y no
hay necesidad de entradas analgicas y digitales adicionales.
93
INTERFAZ DE COMUNICACIONES VORTEX MODELO VCI-
142
El VCI-142 es un dispositivo de interfaz de comunicaciones
diseado para convertir el puerto de datos seriado RS-232 del
Electrospeed GCS en un puerto de dos cables en un sentido a la
vez (half duplex) RS-485 o un puerto de cuatro cables de dos
sentidos (full duplex) RS-422. Cualquiera de las dos
configuraciones puede ser conectada a un sistema de bus de
cable de cadas mltiples puesto que cada transmisor es llevado
a un estado de inactividad de alta impedancia cuando el
dispositivo est inactivo. El VCI-142 usa el puerto incorporado
RS-232 para acceso de datos y su fuente de poder es el voltaje
de control de 120VCA disponible dentro del controlador de
velocidad variable.
PAQUETE SENSOR DE PRESIN EN FONDO DE POZO
CENTRILIFT
El paquete sensor de presin en fondo de pozo (PHD en ingls)
provee una seal analgica variable de 0 a 10 VCC proporcional
a la presin en fondo del pozo en el cual se instala. Esta seal de
0 a 10 VCC se alimenta luego directamente a uno de los dos
puertos de entrada analgica que son equipo estndar del
Electrospeed GCS.
EQUIPO DE TERCEROS
En general, cualquier dispositivo sensor, de medicin o de
deteccin de terceros puede usarse en conjunto con el
Electrospeed GCS si aqullos producen una seal de salida
analgica mensurable o una seal de salida de estatus de
contacto seco. En el caso de las seales analgicas, la salida
debera proveer de 0 a 10 VCC o de 4 a 20mA y ser
autoalimentada. Si se va a usar un medidor de 4 a 20mA, ste
debe producir una seal con capacidad suficiente como para
impulsar una carga de 500 ohm que convertir la corriente en
una seal de 2 10 VCC. Entonces, seleccione el tipo de
instrumento de 4-20mA y el Electrospeed GCS llevar a cero el
estado de seal de 2VCC y usar el resto del rango en el
proceso de escalado.
Si el equipo del tercero es capaz de comunicarse en forma
seriada por medio del protocolo MODBUS, puede resultar ms
eficiente utilizar un RDCM como se describi anteriormente.
MANTENIMIENTO
94
Slo deberan necesitarse ajustes menores en el arranque inicial,
dependiendo de la aplicacin. Adems de establecer stos, se
necesita seguir con algn mantenimiento de sentido comn.
Temperaturas de Operacin:
Gabinete NEMA 1 (IP21): Mantenga a la unidad ubicada
separada de otros equipos que tengan una alta temperatura
ambiente. No se debe restringir el flujo de aire a travs de los
disipadores de calor.
Gabinete NEMA 4 (IP56): En temperaturas ambientes
extremadamente altas puede ser necesario colocar una sombrilla
sobre la unidad para mantenerla dentro del rango de temperatura
operativa.
Mantenga la Unidad Limpia:
Como con cualquier equipo electrnico, la limpieza mejorar la
vida operativa.
Mantenga las Conexiones Ajustadas:
El equipo debera mantenerse alejado de reas de alta vibracin
que pudiera aflojar las conexiones u ocasionar el rozamiento de
cables. Todas las interconexiones deberan volver a ajustarse en
el arranque inicial y al menos una vez cada seis meses.
Reformar los Capacitores Electrolticos de CC: luego de seis
meses en almacenamiento.
Ventilador Externo de Refrigeracin (Slo NEMA 4): Lubricar
cada seis meses con SAE20.
Para ms informacin refirase a la Gua de Diagnstico de
Problemas y Aplicaciones del Electrospeed GCS.
95
DIAGNSTICO DE FALLAS
SALVAGUARDAS IMPORTANTES
Todo trabajo en este controlador debe ser realizado por personal
familiarizado con su operacin y aplicacin.
ADVERTENCIA
Se deben respetar las siguientes advertencias. El no hacerlo
podra resultar en lesiones personales!
Cuando se aplica la energa de entrada hay voltajes letales
presentes dentro del gabinete.
Podra haber voltajes externos presentes en el rea de
terminacin del usuario an cuando se hayan sacado todas
las fuentes de energa de entrada al controlador.
Siempre verifique si hay voltajes a travs del Bus de CC
antes de realizar cualquier diagnstico, reemplazo o
desmontaje de repuesto. Puede haber voltaje letal (hasta
700V CC) bajo ciertas condiciones.
Para evitar daos a los componentes, no desmonte ningn
conector de cable sin desconectar todas las fuentes de
energa del controlador Y sin permitir tiempo suficiente para
que se descarguen todos los capacitores de suministro.
Usualmente un minuto es suficiente.
Para ms informacin refirase a la Gua de Diagnstico de
Problemas y Aplicaciones del Electrospeed GCS.
96
APNDICE A: ESPECIFICACIONES Y CAPACIDADES
ESPECIFICACIONES
Frecuencia de Salida: 10 a 120 Hz. a 480V CA
Voltaje de Salida a 60 Hz.: 40 a 480V CA
Frecuencia de Arranque: 3 a 20 Hz.
Tiempo de Sincronizacin: 0 a 60 seg.
Bloqueo de Alta Velocidad: 40 a 120 Hz.
Resolucin de Frecuencia: .1 Hz.
Voltios/Hertz: .7 - 10 Voltios
Bloqueo de Baja Velocidad: 5 a 90 Hz.
Refuerzo de Voltaje: 0 a 200V CA
Refuerzo de Voltaje durante
Sincronizacin: 0 a 200V CA
Sobrecorriente Instantnea (IOT): 170% de Capacidad de Carga Mxima
Lmite de Corriente: 0 a 150% de Cap. Controlador Veloc. Variable (VSC)
Lmite de Corriente durante
Sincronizacin: 0 a 150% de Capacidad de VSC
Mxima corriente de Sobrecarga: 0 a 150% de Capacidad de VSC para Momento de
Torsin Variable
0 a 200% de Capacidad de VSC para Momento de
Torsin Constante
Bloqueo de Voltaje: 240 a 550V CA
Tiempo de Aceleracin: 2 a 200 Seg.
Tiempo de Desaceleracin: 2 a 200 Seg.
Compensacin de Deslizamiento: 0 a 7,5%
Energa de Control: 24V CC
Eficiencia: > 98% a la Carga de Capacidad
Factor de Energa: .96 a Velocidad Mxima
CAPACIDADES
Voltaje de Entrada:
(Estndar): 380 a 480V CA (trifsico) + 5%, -15%, 50/60 Hz
Frecuencia: 2 Hz
Corriente de Entrada: Ver Apndice E:
Capacidades de Salida: Ver Apndice E:
Temperatura de Operacin:
NEMA 1: (IP21): 0 a 45 C (32 a 113 F)
NEMA 4: (IP56): 0 a 55 C (32 a 131 F)
Con Calentador: -40 a 55 C (-40 a 131 F)
Temperatura de Almacenamiento: -50 a 70 C (-58 a 158 F)
Humedad:
NEMA 1 (IP21): 95% Sin Condensacin
NEMA 4 (IP56): Apto para ser usado a la intemperie en todas las
condiciones climticas.
Elevacin: Hasta 5000 pies (1524 m.) sin disminucin de
capacidad
Peso: Ver Apndice H
Dimensiones: Ver Apndice H
97
APNDICE B: HOJA DE ARRANQUE INICIAL
Customer :
Well Number:
1: Motor Voltage:
2: Desired Operating Frequency
4: Secondary Voltage @ Maximum Hertz: =
6: Transformer Ratio: =
7: Secondary Voltage @ 60 Hertz:=
8: Drive Volts @ 60 Hertz: =
9: Required KVA @ Max. Hertz: =
10: Controller sizing: =
11: V-Clamp: =
Amps:
Cable Size:
Length:
Date:
Drive S/N:
5: Secondary Voltage Taps Selected:
3: Maximum Volts Available (Input Voltage):
Minimum: Maximum:
Motor Voltage X Max. Hz.
60 Hz.
Cable Drop
+ =
Secondary Voltage Taps Selected
Transformer Primary (480)
=
Secondary Voltage @ Max. Hertz X 60
Maximum Hertz
= (from line 4)
Drive Volts @ 60 Hertz X Max Hz
60
=
(from line 8)
Secondary Voltage @ 60 Hertz
Transformer Ratio
= (from line 7)
Surface Voltage X Motor Nameplate Amps X 1.73
1000
=
(Select a drive Model with a continuous current rating => than this calculation)
(Refer to Appendix A: Specification and Sizes)
=
Motor Nameplate Amps X Transformer Ratio
98
APNDICE C: REGISTRO DE INSTALACIN/ SERVICIO
Area ________________ District _______________
Startup____ Service____ Restart____ Report
Customer ___________________ County / Province _______________ State / Country _______________
Facility /Field ______________ Unit / Lease ______________ No____________ City ________________
VSC S/N: _____________ Model _____________ Amps _____ KVA______ Software Rev:PCM________
Motor Mfg__________ Volts __________ Amps_________ Hp________ Service__________
Cable Size_________ Ft__________ Volts/Ft________ Temp Factor __________ Cable __________
Pump Mfg__________ Model__________ Series__________ Stages________
Intake (Rotary, Rev-Flow, Std) Min Hz_______ BPD_______ Max Hz_______ BPD_______
Check Valve_________ Jap Setting ___ Ft Bottom Hole Temp_____ ______ F. deg
Xfrm S/N_________________ Voltage_________ Ratio__________ Taps 1______ 2______ Delta WYE
S etup or Operating Parameters
______Overload Amps ______Volts @60Hz ______Sync Delay ______Low Speed Clamp
______Overload Time ______Start Frequency ______Hi Speed Clamp ______VBoost
______I Limit ______V Boost Sync ______Accel Time ______Reg.Gain%
______I Limit Sync ______V Clamp ______Decel Time ______Slip Comp%
______Fault Restarts ______Underload Amps ______Control Setpoint ______Aux. Restart
______Restart Delay ______Jog Frequency ______PHD Zero ______ PHD Span
______Fault Reset ______Underload Restarts ______Frequency Avoid
______Set Speed(Hz) ______UL Trip Delay ______Output Rotation
______Run Speed(Hz) ______Mode ______Control Signal ______Analog 1 or 2
______Bypass LSTrip Delay ______LSTrip Delay ______LSTrip Enable ______LSTrip Lockout
______UL Bypass Delay ______UL Delay ______UL Enable ______UL Lockout
______DI1 Bypass Delay ______DI1 Delay ______DI1 Enable ______DI1 Lockout
______DI2 Bypass Delay ______DI2 Delay ______DI2 Enable ______DI2 Lockout
______OL Bypass Delay ______OL Delay ______OL Enable ______ OL Lockout
______Wait for Restart Delay
SYSCON______
DISPLAY______
Comments / Observations : _____________________________________________________________________
__________________________________________________________________________________________
__________________________________________________________________________________________
__________________________________________________________________________________________
Job Started: Job Completed: Serviced
Drive Input Volts Unloaded
a/b________ a/c________b/c_______
Drive Input Volts to Ground
a________ b________ c________
Drive Input Volts Loaded
a/b________ a/c________b/c________
Drive Input Amps
@ Hz_____ a)______ b)______ c)_____
@ Hz_____ a)______ b)______ c)_____
Drive Output Volts
@ Hz_____ a/b______ a/c______
@ Hz_____ a/b______ a/c______
Drive Output Amps
@ Hz_____ a)______ b)______ c)_____
@ Hz_____ a)______ b)______ c)_____
Down Hole Motor Amps
@ Hz_____ a)______ b)______ c)_____
@ Hz_____ a)______ b)______ c)_____
Surface Voltage Phase to Ground
a)______ b)______ c)_____
Motor & Cable Ohms Phase to Phase
a/b________ a/c________ b/c________
Motor & Cable Ohms Phase to Ground
a_________ b_________c__________
APNDICE D: DIMENSIONES DE CABLES
RECOMMENDED CABLE SIZED FOR NEMA 4 / IP56 DRIVE, 55 DEG C AMBIENT
All power cabling must be 75 C rated per UL 508C. The cable sizes below are based on 55 C ambient temperature and will work under all circumstances.
Cable sizes may be calculated based on your local maximum ambient. Higher Temperature Rating cables may be used but must be sized for 75 C rating
VSD MODEL INPUT FUSE Current - Input Cable Size (AWG) Ground Conductor Size Cable P/N CABLE GLAND LUG P/N TORQUE RATING LUG KIT
MODEL Rating See Note 2 (Included in Cable) See Note 2 P/N INCH POUNDS P/N
- 6 =6pulse (x) = Conductors Per Phase (x) = # of Conductors INPUT/OUTPUT See Note 4
- 12=12pulse
2060-6 100A 83 #1, (1) #6 AWG (1) 902158 902169 901358 228/228 902182
2075-6 200A 105 2/0, (1) #6 AWG (1) 902160 902171 88160 228/228 902184
2100-6 200A 140 4/0, (1) #4 AWG (1) 902162 902173 48455 228/228 902190
2125-6 200A 164 250MCM, (1) #4 AWG (1) 902163 902174 902177 228/228 902193
2150-6 300A 206 2/0, (2) #6 AWG (2) 902160 902171 88160 228/228 902185
2200-6 300A 253 3/0, (2) #4 AWG (2) 902161 902172 88152 228/228 902187
2250-6 400A 329 250MCM, (2) #4 AWG (2) 902163 902174 902177 228/228 902194
4300-6 500A 411 4/0, (3) #4 AWG (3) 902162 902173 48455 78/78 902191
4350-6 600A 492 250MCM, (3) #4 AWG (3) 902163 902174 902177 78/78 902195
4400-6 700A 573 350MCM, (3) #3 AWG (3) 902164 902175 902178 78/78 902198
4500-6 800A 655 500MCM, (3) #2 AWG (3) 902165 902176 86659 78/78 902200
See Note 3 for 2/4000 12 Pulse Drives
2060-12 2-50A 2 X 41.5 #6, (1) for Each Input, (2) Output #8 AWG (2) 902155 902166 88758 228/228 902179
2075-12 2-100A 2 X 52.5 #4, (1) for Each Input, (2) Output #8 AWG (2) 902156 902167 86529 228/228 902180
2100-12 2-100A 2 X 70 #2, (1) for Each Input, (2) Output #6 AWG (2) 902157 902168 86562 228/228 902181
2125-12 2-100A 2 X 82 1/0, (1) for Each Input, (2) Output #6 AWG (2) 902158 902169 51145 228/228 902183
2150-12 2-150A 2 X 103 2/0, (1) for Each Input, (2) Output #6 AWG (2) 902160 902171 88160 228/228 902185
2200-12 2-150A 2 X 126.5 3/0, (1) for Each Input, (2) Output #4 AWG (2) 902161 902172 88152 228/228 902187
2250-12 2-200A 2 X 164.5 250MCM, (1) for Each Input, (2) Output #4 AWG (2) 902163 902174 902177 228/228 902194
4300-12 2-250A 2 X 205.5 2/0, (2) for Each Input, (4) Output #6 AWG (2) 902160 902171 88160 78/78 902186
4350-12 2-300A 2 X 246 3/0, (2) for Each Input, (4) Output #4 AWG (2) 902161 902172 88152 78/78 902188
4400-12 2-350A 2 X 286.5 4/0, (2) for Each Input, (4) Output #4 AWG (2) 902162 902173 48455 78/78 902192
4500-12 2-400A 2 X 327.5 250MCM, (2) for Each Input, (4) Output #4 AWG (2) 902163 902174 902177 78/78 902196
8600 2-500 2 X 394 3/0, (3) for Each Input, (6) Output #4 AWG (6) 902161 902172 88152 78/78 902189
8700 2-600 2 X 473 250MCM, (3) for Each Input, (6) Output #4 AWG (6) 902163 902174 902177 78/78 902197
8800 2-700 2 X 552 350MCM, (3) for Each Input, (6) Output #3 AWG (6) 902164 902175 902178 78/78 902199
8900 2-800 2 X 626 500MCM, (3) for Each Input, (6) Output #2 AWG (6) 902165 902176 86659 78/78 902201
Note 1: 8000 Series Drives have two inputs and may be operated as either a 6 pulse or 12 pulse drive
Note 2: Cables are copper, 3 conductor w/ ground conductor and aluminum armor, XLP, 90 C (sized as 75 C), 600V
Note 3: Cables for 12 Pulse Models are Shown for Dual Input Switches. For One Input Switch 12 Pulse Models, Use 6 Pulse Cable Sizes, Lug Kits, Torque & Cable Glands.
Note 4: Lug kits include lugs only for the drive output - the input switches come with mechanical lugs.
98
APNDICE E: CAPACIDADES DE VSC DE MOMENTO DE
TORSIN VARIABLE
Capacidades de Salida a 480VCA / 400VCA Cap. Entrada
Amperios
Modelo
KVA
480/400
Corriente
Continua
Amp Eficaz
Corriente de
Sobrecarga
60 Seg.
Corriente
Arranque
7 Seg.
Cap.
Fusible
Corriente de
Entrada
1060 o 2060-VT 66 / 52 79 95 119 100 83
1075 o 2075-VT 83 / 66 100 120 150 200 105
1100 o 2100-VT 111 / 88 133 160 200 200 140
1125 o 2125-VT 130 / 103 156 187 234 200 164
2150-VT 163 / 129 196 235 294 300 206
2200-VT 200 / 159 241 289 362 300 253
2250-VT 260 / 206 313 376 470 400 329
4300-VT 325 / 257 391 469 587 500 411
4350-VT 390 / 308 469 563 704 600 492
4400-VT 454 / 359 546 655 819 700 573
4500-VT 519 / 411 624 749 936 800 655
8600-VT 624 / 494 750 900 1125 500x2 788
8700-VT 748 / 592 900 1080 1350 600x2 945
8800-VT 873 / 691 1050 1260 1575 700x2 1103
8900-VT 1000 / 792 1203 1444 1805 800x2 1252
9311-VT 1150/ 1383
9313-VT 1350/ 1624
9315-VT 1550/ 1864
9417-VT 1750/ 2105
9420-VT 2000/ 2405
NOTA: Cuando se aplican controladores de velocidad variable a cargas de momento de torsin constante, la
corriente de salida continua y los KVA de salida se disminuyen en un 20%. Las corrientes de Sobrecarga y de
Arranque permanecen igual. Los nmeros de modelo listados aqu no incluyen el identificador de gabinete. (es
decir 2200-1VT o 2200-3VT)
FUSIBLES DE ENTRADA
DESIGNADOR DESCRIPCIN
NO. PARTE
CENTRILIFT
FABRICANTE
NO. PARTE
FABRICANTE
F1,F2 FUS.,5A,500V LENTO 48106 BUSSMANN FNQ5
F3,F6 FUS.,1A,500V LENTO 901263 BUSSMANN FNQ1
F5 FUS.,2A,250V RPIDO 901265 LITTLEFUSE 217002
F4 y F7 FUS.,2A,250V ,LENTO 901761 LITTLEFUSE 239002
F8 y F9 FUS.,250V 3.15A,LENTO 901266 LITTLEFUSE 2183.15
Fus. Sec. para Transformador Control, CPT1
FU7 900967 BUSSMANN #MDL-2
99
100
APNDICE F: CONFIGURACIN BSICA
El siguiente procedimiento definir la mayora de los
parmetros requeridos para el arranque actual del controlador
GCS en condiciones normales operativas para bombas
sumergibles. Realizar los pasos de FORMACIN de
CAPACITORES slo si la unidad no ha sido operada durante 6
meses o ms. Por favor asegrese de que se respeten las
precauciones de seguridad.
1. Encienda el Interruptor Principal de Energa de Entrada,
luego oprima la tecla STOP en el teclado.
2. Defina la Frecuencia en 60 Hz.
3. Defina el Bloqueo de Alta Velocidad en los hertz
requeridos para la aplicacin.
4. Defina el Bloqueo de Baja Velocidad en los hertz
requeridos para la aplicacin.
5. Defina el Lmite de Corriente de Operacin en el
amperaje de placa del motor por proporcin de
transformador por 10 Refuerzo 5%.
6. Defina el Lmite de Corriente de Sincronizacin en el
amperaje de placa del motor por proporcin de
transformador por 125%.
7. Defina el Voltaje a 60Hz en el valor calculado en la hoja de
ARRANQUE.
8. Defina el Bloqueo de Voltaje en el valor del voltaje de
entrada, pero no mayor a 480 voltios.
9. Defina el Refuerzo de Voltaje en cero.
10. Defina Refuerzo de Voltaje en Sincronizacin en cero.
11. Defina la Frecuencia de Sincronizacin en 10 Hz.
12. Defina la Demora de Sincronizacin en 2 segundos.
13. Defina el Tiempo de Aceleracin en 10 segundos.
14. Defina el Tiempo de Desaceleracin en 10 segundos.
15. Defina la Rotacin del Inversor en HACIA ADELANTE o
FWD.
16. Defina la Ganancia del Regulador en 70 %.
17. Defina la Compensacin de Deslizamiento en cero.
18. Defina las frecuencias de Frecuencias a Evitar en cero.
19. Defina el Modo de Control en Valor de Frecuencia (FR
SET)
20. Defina el Mximo de Arranques Permitidos en 5.
21. Defina la demora para Restaurar Contador de Arranques
en 30 minutos.
22. Defina la Demora de Arranque en 30 minutos.
23. Defina el valor de SOBRECARGA en el amperaje de placa
del motor por proporcin de transformador por 120%.
24. Defina la DEMORA DE PARADA DE SOBRECARGA en 5
segundos.
25. Defina el Valor de BAJA CARGA en CERO.
26. Defina la Demora DE PARADA DE BAJA CARGA en 30
segundos.
27. Verifique y/o cambie el RELOJ a la hora y fecha actuales.
28. Si se requiere, realice los pasos en la seccin siguiente
para FORMAR LOS CAPACITORES o prosiga con la
CONFIGURACIN SIN CARGA.
101
PARA EL ARRANQUE O DIAGNSTICO INICIAL SE RECOMIENDA, DONDE SEA PRCTICO, QUE SE
DESCONECTE LA CARGA, Y QUE SE OPERE EL CONTROLADOR DE VELOCIDAD VARIABLE SIN CARGA
PARA VERIFICAR UNA OPERACIN CORRECTA.
102
FORMACIN DE CAPACITORES
Realice estos pasos slo si la unidad no ha estado operando
durante 6 meses.
1. Realice los pasos anteriores para CONFIGURACIN
BSICA.
2. Defina el Lmite de Corriente de Operacin en el valor
mximo.
3. Defina el Limite de Corriente de Sincronizacin en el
valor mximo.
4. Defina VOLTIOS A 60HZ en 230 voltios.
5. Defina el VALOR DE SOBRECARGA en la capacidad
mxima del controlador.
6. Oprima el botn de ARRANQUE (START) y confirme que
el controlador acelera hasta 60 Hz.
7. Verifique los voltios de salida, a 60 Hertz el controlador
debera tener 230 voltios de salida.
8. Aumente los VOLTIOS A 60 HZ. en incrementos de 50
voltios con pausas de cinco minutos entre cada aumento
hasta alcanzar el voltaje de salida mximo.
9. Oprima PARAR (STOP) para detener el controlador.
103
APNDICE G: ARRANQUE
Si el controlador GCS no ha sido arrancado o usado en esta
aplicacin antes, deberan seguirse los pasos en el APNDICE
F: CONFIGURACIN BSICA antes de intentar estos pasos
de SIN CARGA o ARRANQUE.
CONFIGURACIN SIN CARGA
1. Desconecte el cable de fondo de pozo en la caja de
conexin.
2. Defina el Voltaje a 60Hz de acuerdo a la hoja de arranque.
3. Asegrese de que el valor de SOBRECARGA sea igual al
amperaje de placa del motor por la proporcin del
transformador por 120%.
4. Asegrese de que el Lmite de Corriente de Operacin
sea igual al amperaje de placa del motor por la proporcin
del transformador por 105%.
5. Asegrese de que el Lmite de Corriente de
Sincronizacin sea igual al amperaje de placa del motor
por la proporcin del transformador por 125%.
6. Apague el Interruptor Principal de Energa de Entrada.
7. Conecte un medidor de secuencia de fase a la salida del
controlador al punto ms cercano al cabezal de pozo para
confirmar una rotacin de fase apropiada.
8. Encienda el Interruptor Principal de Energa de Entrada.
9. Oprima el botn ARRANCAR (START) y confirme una
secuencia de fase correcta, luego pare el controlador.
10. Apague el Interruptor Principal de Energa de Entrada y
desconecte el medidor de secuencia de fase.
ARRANQUE
1. Conecte el cable de fondo de pozo a la caja de conexiones.
2. Desde el MEN PRINCIPAL, seleccione y despliegue la
pantalla de ESTATUS.
3. Oprima el botn ARRANCAR (START) y confirme que la
frecuencia de salida acelere hasta la velocidad definida o
60 Hz.
4. Confirme el voltaje de salida correcto Voltaje a 60Hz del
controlador en la pantalla de ESTATUS.
5. Defina la FREQUENCY a la velocidad mnima de acuerdo
a la hoja de arranque.
6. Defina el valor de BAJA CARGA al 10% por debajo de la
corriente de fase de salida ms baja mientras funciona al
mnimo de hertz. Registre en la hoja de arranque.
7. Defina la FRECUENCIA en la velocidad de operacin
deseada.
CUMPLIMIENTO CON LOS REQUERIMIENTOS NEC/CSA
Muchas aplicaciones en campo no relacionadas con el petrleo
necesitarn cumplir con el Cdigo Elctrico Nacional de los
EE.UU. (US National Electrical Code, o NEC) o la Asociacin
de Estndares Canadienses (Canadian Standard Association,
o CSA). Para satisfacer estos requerimientos siga los
procedimientos a continuacin.
Valor de Sobrecarga El valor de Sobrecarga debe definirse
a no ms del 115% de la corriente de placa del motor.
104
Para compensar por el uso de un transformador elevador,
calcule el amperaje equivalente del controlador multiplicando la
corriente de placa del motor por la proporcin del
transformador en base al conector del transformador en uso.
Definir el valor de sobrecarga como el 115% del amperaje del
controlador calculado anteriormente.
Demora de PARADA por Sobrecarga La demora de parada
debe ser definida en menos de 300 segundos.
APNDICE H: PESOS Y DIMENSIONES
MODELO NMERO: 1060 GCS / 1125 GCS
Nema 1 /3 Peso: 500 libras (226,5 kg.)
Altura Total: 70,38 pulg. (178,7 cm.) Profundidad Total: 22,00 pulg. (55,9 cm.)
Ancho Total: 31,88 in (81 cm.)
105
106
MODELO NMERO: 2000 GCS (NEMA 1)
Peso: 985 libras. (446,2 kg.)
Altura Total: 92.50 pulg. (234,9 cm.)
Ancho Total: 23.63 pulg. (60 cm.)
Profundidad Total: 26.63 pulg. (67,6 cm.)
107
MODELO NMERO: 2000 GCS (NEMA 4)
Peso: 1020 libras (462 kg)
Altura Total: 82,5 pulg. (209,6 cm.)
Ancho Total: 38,75 pulg. (98,4 cm.)
Profundidad Total: 44,50 pulg. (113 cm.)
108
MODELO NMERO: 2000 GCS PWM (NEMA 4)
Peso: 1600 libras (724,8 kg.)
Altura Total: 82,5 pulg. (209,6 cm.)
Ancho Total: 38,75 pulg. (98,4 cm.)
Profundidad Total: 52,88 pulg. (134,3 cm.)
109
MODELO NMERO: 4000 GCS (NEMA 1)
Peso: 1460 libras (661,4 kg.)
Altura Total: 92,50 pulg. (234,9 cm.)
Ancho Total: 39,38 pulg. (100 cm.)
Profundidad Total: 26,75 pulg. (67,9 cm.)
110
MODELO NMERO: 4000 GCS (NEMA 4)
Peso: 1450 libras (656,8 kg.)
Altura Total: 82,50 pulg. (209,6 cm.)
Ancho Total: 51,50 pulg. (130,8 cm.)
Profundidad Total: 47,25 pulg. (120 cm.)
111
MODELO NMERO: 4000 GCS PWM (NEMA 4)
Peso: 2480 libras (1123,4 kg.)
Altura Total: 82,50 pulg. (209,6 cm.)
Ancho Total: 51,50 pulg. (130,8 cm.)
Profundidad Total: 56,00 pulg. (142,2 cm.)
112
MODELO NMERO: 8000 GCS (NEMA 1)
Peso: 3200 libras (1449,6 kg.)
Altura Total: 92,50 pulg. (234,9 cm.)
Ancho Total: 94,88 pulg. (241 cm.)
Profundidad Total: 26,75 pulg. (67,9 cm.)
113
MODELO NMERO: 8000 GCS (NEMA 4)
Peso: 3300 libras (1494,9 kg.)
Altura Total: 84,38 pulg. (214,3 cm.)
Ancho Total: 117,62 pulg. (298,7 cm.)
Profundidad Total: 46,90 pulg. (119,1 cm.)
MODELO NMERO: 8000 GCS PWM (NEMA 4)
Peso: 5200 libras (2355,6 kg.)
Altura Total: 84,13 in. (213,7 cm.)
Ancho Total: 117,62 in. (298,7 cm.)
Profundidad Total: 49,40 in. (125,5 cm.)
114
115
DIMENSIN DE PLACA DE CONEXIN / CONECTOR: NEMA 1
116
DIMENSIN DE PLACA DE CONEXIN / CONECTOR: NEMA 4
117
APNDICE I: DIAGRAMAS ESQUEMTICOS
ESQUEMTICO DE CONTROL DE BLOQUE SERIES 1000, 2000, 4000
Nota: Opcin de Monitoreo de Corriente de Entrada no est disponible
118
ESQUEMTICO DE CONTROL DE BLOQUE SERIES 1000, 2000, 4000
Parada Opcional Categora 0
119
ESQUEMTICO BSICO DE ENERGA SERIES 1000, 2000, 4000
120
ESQUEMTICO DE CONTROL DE BLOQUE SERIE 8000
Nota: Opcin de Monitoreo de Corriente de Entrada no est disponible
121
ESQUEMTICO DE CONTROL DE BLOQUE SERIE 8000
Nota: Opcin de Monitoreo de Corriente de Entrada no est disponible
122
ESQUEMTICO BSICO DE ENERGA SERIE 8000
123
ESQUEMTICO BSICO DE ENERGA SERIE 8000
124
ESQUEMTICO BSICO DE ENERGA SERIE 8000
Nota: Opcin de Monitoreo de Corriente de Entrada no est disponible
APNDICE J: CONTROLADORES MULTIGABINETE
CONEXIN, CONFIGURACIN Y OPERACIN DE CONTROLADORES MULTIGABINETE
Generalidades: Este apndice describe la configuracin y el uso de controladores GCS que
involucran mltiples gabinetes y por lo tanto, mltiples Tarjetas de Circuito Impreso (PCB en
ingls) de Control de Sistema. Esta informacin no se aplica a controladores arbitrarios
conectados en paralelo, sino a los controladores GCS de la serie 9000 diseados para
aplicaciones que requieren ms de 1000KVA. Las capacidades especficas son:
Modelo No. Configuracin Capacidad KVA Capacidad Corriente
(Mxima Sobrecarga)
9311 3 X 390KVA serie 4000 1150 1383
9313 3 X 454KVA serie 4000 1350 1624
9315 3 X 518KVA serie 4000 1550 1864
9417 4 X 454KVA serie 4000 1750 2105
9420 4 X 518KVA serie 4000 2000 2405
Puesto que los convertidores en cada gabinete son independientes, se los puede conectar en
paralelo para operacin estndar de 6 pulsos o se los puede configurar para producir una
operacin de 12 o ms pulsos cuando se los suministre con la energa de entrada de fase
apropiadamente desplazada. An cuando se han asignado nmeros de modelos a estos
controladores, stos no son productos estndar y configurables sino especiales. Si usted tiene una
aplicacin que requiere una de estas capacidades comunquese con Ingeniera de Controles
(Controls Engineering) para ms detalles.
La configuracin bsica de un controlador de la serie 9000 consiste de los siguientes pasos:
1. Conecte la energa apropiada a todas las entradas.
2. Interconecte el bus de CC positivo en todos los gabinetes. Interconecte el bus de CC
negativo en todos los gabinetes.
3. Conecte las salidas a la carga a travs de los inductores apropiados. Si el controlador va a
ser operado en modo Modulacin de Ancho de Pulso (PWM), entonces cada gabinete
tendr un filtro PWM separado. (Refirase al manual del Controlador de Filtro PWM para
ms informacin). Si el controlador va a ser operado en modo ESP entonces se necesitar
conectar las salidas a inductores compartidos o a primarios separados del transformador
elevador.
4. Usando los aisladores RS485 suministrados, interconecte el conector de Tarjeta de
Conversor Remoto (RCB) de todas las Tarjetas de Control de Sistema (SCB) de acuerdo
al diagrama.
5. Instale las Tarjetas de Expansin de Seal de Inversor en lugar de las Tarjetas de Seal
de Inversor (ISB) estndar.
6. Configure los saltos (jumpers) de los ISEB de manera apropiada para operacin Maestra o
Remota.
7. Instale los cables de fibra ptica.
8. Instale el Mdulo de Personalidad apropiadamente configurado en el gabinete del
controlador Maestro.
9. Conecte temporalmente un despliegue a cada SCB y configure las comunicaciones de la
RCB. Cuando esto est hecho, desconecte el despliegue de las SCB remotas.
10. Suministre energa y realice la configuracin final en el controlador Maestro.
El Diagrama nmero 902295 muestra los detalles de conexin.
125
126
Conexin/ Hardware Nuevo: La operacin bsica de un controlador GCS paralelo consiste de un
SCB Maestro que se comunica con uno a tres SCB Remotos a travs del bus de comunicaciones
seriadas del RCB (Tarjeta de Conversor Remoto). Este enlace suministra datos suficientes para
Arrancar y Parar y compartir corriente entre todos los conversores. Debido al ruido elctrico local
de cada una de las conexiones a tierra del gabinete, es necesario aislar elctricamente las seales
de RCB y las conexiones a tierra entre los gabinetes. Esto se logra con el aislador/ repetidores
RS485 montados en el gabinete Maestro. Cada SCB remoto retiene el Mdulo de Personalidad
original y monitorea sus corrientes y hardware propios y locales y reporta fallas o problemas al
SCB Maestro.
Las seales de inversor del inversor Maestro estn acopladas pticamente a cada uno de los
Remotos a travs de la nueva Tarjeta de Expansin de Seales de Inversor (ISEB). Esto asegura
que todos los dispositivos de salida se conecten al mismo tiempo. Esta tarjeta es esencialmente
una Tarjeta de Seales de Inversor con acopladores de fibra ptica agregados para transmitir y
recibir mltiples seales de puertas e Interrupciones por Sobrecarga Instantnea (IOT). Tiene un
salto de dos conectores que lo configura para operar en el gabinete Maestro o el Remoto.
Debido a pequeas diferencias de tiempo remanentes en los circuitos pticos, es necesario
colocar alguna impedancia entre las terminales de salida de cada gabinete y la carga comn. Esto
se puede suministrar por filtros PWM individuales para cada gabinete (si se va a operar el
controlador en modo PWM), bobinados primarios separados en los transformadores elevadores de
cada gabinete (si esta es una aplicacin sumergible) o compartiendo inductores en las conexiones
de salida si esta es una aplicacin de superficie.
Finalmente, para asegurar que se comparta la corriente de rgimen en las secciones individuales
de inversor y conversor, es necesario interconectar los buses de CC de todos los gabinetes.
Cambios al Sistema Operativo: Los cambios ms significativos al sistema operativo son el men
de configuracin de RCB, y un nmero de tems nuevos que aparecern en la ventada de Alarmas
Activas, la Historia de Eventos, y la Historia de Paradas. En el men de configuracin de RCB, los
SCB individuales se designan como Maestro o Remoto y se les asigna una direccin de RCB
unvoca. Se despliegan tambin en esta pantalla las corrientes de salida de cada SCB individual.
Las fallas se manejan an de la misma manera. La diferencia ms importante es que el anuncio de
fallas incluir ahora un sufijo que indica dnde se gener la falla. Por ejemplo, una Interrupcin de
Sobrecarga Instantnea de fase A negativa generada en el primer Remoto (Direccin de RCB 2)
aparecer como:
A Neg IOT R1
para indicar que se origin en el Remoto nmero 1. Una falla que se origine en el SCB Maestro
aparecer como de costumbre sin sufijo. Se ha agregado una nueva falla para indicar problemas
de comunicaciones entre los distintos SCB. Esta falla es una Falla de Comunicaciones de RCB
(RCB Com fault) y tendr tambin un sufijo para indicar la fuente. En general, esta falla indica que
el enlace de comunicaciones entre el Maestro y uno o ms Remotos se ha interrumpido.
Es importante notar que cada controlador local est an restringido por los lmites normales
operativos para su medida particular. Por lo tanto cada controlador an monitores su propia
corriente (y la compara a sus capacidades mximas) y puede generar una sobrecarga si las
condiciones lo requieren. Si, por ejemplo, el Remoto 1 detecta una condicin de sobrecarga pero
la corriente combinada de todos los gabinetes no es la suficiente como para generar una
sobrecarga en el Maestro, entonces el Remoto generar una parada por sobrecarga que se
desplegar como Sobrecarga R1 (Overload R1).
Operacin: Cuando se suministra energa al sistema por primera vez ser necesario ir al men de
Configuracin de RCB (SCADA, Seguridad y Sistema\Sistema\Configuracin de RCB) y
127
definir el Tipo de RCB en un SCB como
maestro (mstr) y en todos los dems como
remoto (rmt). Adems, se debera definir la
Direccin RCB del Maestro como 1 y todos los
Remotos deberan definirse como direcciones
unvocas consecutivas. Para hacer esto en los
gabinetes Remotos, ser necesario conectar
temporalmente un despliegue al conector
CITIBus del SCB. Una vez que hayan sido
configurados, se debern desconectar los
despliegues de las unidades Remotas y se
deber ciclar la energa para volver a inicializar el
software.
Luego de haber restaurado la alimentacin, una de las primeras indicaciones visuales de una
operacin apropiada es que el diodo (LED) de Actividad 32 de todos los SCB comenzar a titilar,
luego dejar de titilar durante 5 a 10 segundos antes de reanudar su actividad normal. sta es una
indicacin de que el SCB Maestro est buscando (y ha identificado) a los Remotos.
Como confirmacin adicional de esto, hay un
nuevo agregado a la pantalla de Estatus. En el
espacio horizontal justo bajo el estatus de
Rotacin y Modo, habr una marca, una
barrita vertical y corta para cada Remoto
detectado. Estas marcas son indicaciones de
comunicaciones vlidas con los SCB Remotos.
La ilustracin a la izquierda muestra que se ha
encontrado un SCB Remoto.
En este momento, el controlador puede ser
configurado como en una instalacin normal.
Sin embargo, usted notar que si el Mdulo de
Personalidad ha sido configurado correctamente
e instalado, los mximos para muchas de los
valores relativos con la corriente (Lmite de
Funcionamiento, Sobrecarga, etc.) deberan
aumentar para acomodarse a la medida del
128
controlador combinado. Adems, la corriente
desplegada en la pantalla de estatus ser la
corriente combinada de todos los gabinetes.
Como una herramienta de diagnstico se
despliegan las corrientes de los gabinetes
individuales en el men de Configuracin de
RCB.
129
NDICE
ACCIN DIRECTA..................................... 68
ACCIN REVERSA.................................... 68
ACELERACIN.................................... 30, 31
ACTUALIZAR........................................ 77, 83
ALARMA DE INTERRUPCIN POR BAJA
VELOCIDAD............................................ 59
ALMACENAMIENTO........................ 9, 77, 93
ANUNCIA.............................................. 20, 83
APROBACIN.............................................. 8
ARRANQUE AUTOMTICO ... 14, 18, 19, 36,
37, 41, 42, 51, 53, 54, 55, 56, 57, 58, 62,
63, 76, 86, 87, 88, 89
ARRANQUE AUTOMTICO INTERNO36, 38
AUTO ARRANQUES INTERNOS .............. 17
BAJA CARGA....................................... 53, 54
BAJO VOLTAJE.......................................... 56
BLOQUEO DE ALTA VELOCIDAD27, 28, 32,
66, 68, 95, 100
BLOQUEO DE BAJA VELOCIDAD27, 30, 32,
58, 66, 68, 95, 100
CABLEADO DE ENERGA......................... 10
CABLEADO DE INTERFAZ CON EL
USUARIO................................................ 11
CAMBIO DE GRAN VALOR....................... 16
CAPACITORES...................................... 7, 94
CAPTURA DE PANTALLA......................... 23
COLOR INVERSO................................ 15, 16
COMUNICACIN ..11, 62, 76, 79, 80, 81, 91,
92
COMUNICACIN SERIADA .......... 79, 80, 81
CONDICIN DE BLOQUEO ... 17, 20, 36, 37,
51, 53, 55, 56, 57, 59, 60, 82
CONECTORES..................................... 11, 12
CONEXIN DE HARDWARE..................... 80
CONFIGURACIN DE GCS ... 25, 27, 30, 34,
36, 41, 42, 59, 82
CONTRASEA................... 16, 21, 34, 81, 82
CONTRASTE.............................................. 22
CONVENCIONES DEL DESPLIEGUE DE
GCS......................................................... 15
CORRIENTE............................................. 104
CORRIENTE DE ENTRADA EXCESIVA ... 51
CORRIENTE DE SALIDA.. 28, 29, 32, 33, 35,
51, 77, 84, 99
DEMORA DE ARRANQUE37, 38, 53, 54, 55,
57, 58, 64, 87, 88, 89
DEMORA DE SINCRONIZACIN.............. 31
DEMORA PROGRESIVA DE ARRANQUE37
DESACELERACIN................................... 31
DESCRIPCIN GENERAL......................... 25
DESBALANCE DE VOLTAJE..................... 57
DESLIZAMIENTO....................................... 32
DETALLE DE PARADA.............................. 39
DIAGNSTICO.......................................... 94
DIRECCIN ............................................... 31
DISTORSIN ARMNICA................... 11, 77
DOWN TM.................................................. 41
ENTRADA ANALGICA... 12, 32, 39, 66, 67,
68, 85, 86, 87, 88, 92
ENTRADA ANALGICA INTERNA ..... 85, 88
ENTRADA DE CABLES............................. 10
ENTRADA DE RETROALIMENTACIN .. 66,
67, 68
ENTRADA DE VALOR................... 66, 67, 68
ENTRADA DIGITAL INTERNA ............ 88, 90
ENTRADAS ANALGICAS ................. 12, 85
ENTRADAS DIGITALES.......... 11, 76, 88, 90
ESPACIO.................................................... 10
ESPERA PARA ARRANQUE..................... 18
ESPERAR TIEMPO DE ARRANQUE........ 38
FALLAS Y ALARMAS................................. 51
FONDO DE POZO..................................... 35
FORMACIN DE CAPACITORES... 100, 102
FRECUENCIA DE SALIDA27, 28, 30, 31, 32,
33, 34, 53, 66, 68, 69, 103
FRECUENCIA DE SINCRONIZACIN..... 30,
100
FRECUENCIA DE TROTE......................... 33
FRECUENCIA ESTABLECIDA.................. 66
FUNCIONES DE LGICA PROGRAMABLE
................................................................ 65
GANANCIA DE REGULADOR................... 32
GANANCIA DERIVATIVA .......................... 68
GANANCIA INTEGRAL.............................. 67
GANANCIA PROPORCIONAL................... 67
GENERALIDADES..................................... 13
GRFICOS........................................... 39, 49
HAND/OFF/AUTO...................................... 17
HISTORIA DE PARADAS .......................... 39
HOA EXTERNO......................................... 17
HORA ACTUAL.................................. 83, 100
INT AUTO RSTRT...................................... 17
INTERFAZ CON OPERADOR........... 7, 8, 13
INTERRUPCIN POR SOBRECARGA
INSTANTNEA....................................... 52
INTERRUPTOR DE DESCONEXIN DE
ENTRADA............................................... 10
INTERRUPTORES............................... 13, 15
INTERRUPTORES MONTADOS EN PANEL
................................................................ 17
LCD ...................................................... 13, 15
LEER................ 13, 21, 25, 26, 39, 40, 42, 90
LMITE DE CORRIENTE............................ 27
130
LMITE DE CORRIENTE DE OPERACIN
........................................... 28, 30, 100, 103
LKOUT........................................................ 20
LUCES DE PANEL ......................... 12, 18, 19
LUZ MBAR ............................................... 19
LUZ ROJA............................................. 18, 19
LUZ VERDE................................................ 18
MANTENIMIENTO.................................. 9, 93
MANTENIMIENTO DEL SISTEMA............. 76
MXIMO DE ARRANQUES PERMITIDOS 36
MENS DE GCS........................................ 15
MINUTOS .......37, 38, 40, 41, 42, 63, 83, 100
MODIFICABLE................................ 16, 34, 35
MODO DE INVERSOR............................... 31
MODO OPERATIVO................................... 17
MDULOS..................7, 8, 21, 78, 90, 91, 92
MOMENTO DE TORSIN.. 29, 30, 33, 34, 35
MOMENTO DE TORSIN CONSTANTE... 7,
27, 29, 33, 99
MOMENTO DE TORSIN VARIABLE.. 7, 29,
33
NIVELES DE REVISIN DE SOFTWARE 22,
78
OPERACIN BSICA................................ 76
PANTALLA DE CRISTAL LQUIDO........... 13
PANTALLA PERSONALIZADA.................. 75
PARADA CENTRAL ................................... 80
PROTOCOLO DE COMUNICACIONES.... 79
PUNTA DE FLECHA .................................. 16
PUNTERO DE RESALTE........................... 15
RANGO................................................. 12, 85
REGISTRO E HISTORIA............................ 39
RELOJ.................................................. 21, 83
RELOJ EN TIEMPO REAL................... 21, 83
RENOMBRAR............................................ 23
ROTACIN DE INVERSOR............... 31, 100
SALIDA DE FRECUENCIA........................ 30
SALIDA DIGITAL........................................ 20
SALIDAS DIGITALES................................. 20
SEGURIDAD.................. 8, 16, 20, 34, 76, 82
SEGURIDAD DEL SISTEMA... 16, 34, 81, 82
SELECCIN DE MODO
MANUAL/AUTOMTICO........................ 17
SENSORES DE TEMPERATURA............. 59
SOBRECARGA.......... 30, 33, 51, 52, 53, 104
STATUS ..................................................... 22
TECLA ARRANCAR................................... 37
TECLA PARAR........................................... 13
TECLA STOP............................... 20, 36, 100
TECLAS CON FLECHA.... 13, 15, 16, 21, 22,
23, 27, 40, 44, 49, 70, 72, 85
TEMPERATURA AMBIENTE............... 10, 93
TIEMPO DE DESACELERACIN ..... 31, 100
TIEMPO DE PARADA................................ 41
TIEMPO DEFINIDO.................................... 31
TIEMPO TOTAL DE FUNCIONAMIENTO. 41
TIEMPO TOTAL DE PARADA................... 41
TRANSPORTE....................................... 9, 10
UNIDAD DE DESPLIEGUE17, 18, 20, 21, 42,
49, 50, 81, 92
VALOR DE SOBRECARGA................. 51, 52
VOLTAJE DE SALIDA. 7, 28, 29, 32, 35, 102,
103
Potrebbero piacerti anche
- 3.1 Pensamiento SistemicoDocumento13 pagine3.1 Pensamiento SistemicoVanya Giselle100% (2)
- Proyecto Basico Paneles Solares DomiciliarioDocumento20 pagineProyecto Basico Paneles Solares DomiciliarioJuan QuintanillaNessuna valutazione finora
- Programacion Con Casio CP330PlusDocumento15 pagineProgramacion Con Casio CP330PlusChiche GodNessuna valutazione finora
- Problema Del ViajanteDocumento2 pagineProblema Del ViajanteJimy el rosqueteNessuna valutazione finora
- Prueba Diagnostica 9º 2022 Dibujo TecnicoDocumento1 paginaPrueba Diagnostica 9º 2022 Dibujo TecnicoNixy ColindresNessuna valutazione finora
- Imagenes Modelacion EcuacionDocumento26 pagineImagenes Modelacion EcuacionPROFABELGPNessuna valutazione finora
- 1866219242.triangulos OblicuangulosDocumento6 pagine1866219242.triangulos OblicuangulosFilomena CallahuaraNessuna valutazione finora
- Introduccion A La ElectroterapiaDocumento4 pagineIntroduccion A La ElectroterapiaJhenyNessuna valutazione finora
- Manual Calefont 7 LitrosDocumento11 pagineManual Calefont 7 LitrosAlicia Fernandez Z.Nessuna valutazione finora
- Farmacologia Basica y Cli Katzung 14a Edicion (1) - 267-287Documento21 pagineFarmacologia Basica y Cli Katzung 14a Edicion (1) - 267-287yulissa lopezNessuna valutazione finora
- Ley de BoyleDocumento5 pagineLey de BoyleJhamilita TicliahuancaNessuna valutazione finora
- GMA102Documento2 pagineGMA102Hans SigristNessuna valutazione finora
- Marco TeoricoDocumento4 pagineMarco TeoricoFranklin Vargas GòmezNessuna valutazione finora
- Examenes DesalesDocumento8 pagineExamenes DesalesEdgarNessuna valutazione finora
- Manual Del Laboratorio Fisica IIIDocumento31 pagineManual Del Laboratorio Fisica IIIEl Gran Duque De BrunhildNessuna valutazione finora
- Aplicacion Lantrix SmsDocumento5 pagineAplicacion Lantrix SmsRita BorgoRose50% (2)
- Músculos Del AbdomenDocumento32 pagineMúsculos Del AbdomenNorma Montoya EsquerNessuna valutazione finora
- Topografía I: Facultad de IngenieríaDocumento41 pagineTopografía I: Facultad de IngenieríaLUIGGI ALBERT CORDERO ACUÑANessuna valutazione finora
- Secuencia Didáctica-Informatica Ii 2022BDocumento16 pagineSecuencia Didáctica-Informatica Ii 2022BJesus NavidadNessuna valutazione finora
- Poo MonografiaDocumento7 paginePoo MonografiaJonel CuevaNessuna valutazione finora
- Art 02Documento19 pagineArt 02Ricardo Perez GiraldoNessuna valutazione finora
- Tarea 1. Máquinas Térmicas 2121Documento5 pagineTarea 1. Máquinas Térmicas 2121WILSON EFRAIN GAVILANEZ AZOGUENessuna valutazione finora
- Oscilador Armónico Forzado: Amortiguamiento - ResonanciaDocumento17 pagineOscilador Armónico Forzado: Amortiguamiento - ResonanciaMILTON PERCY VARGAS NINASIVINCHANessuna valutazione finora
- MATERIALES Y METODOS EmbriologiaDocumento12 pagineMATERIALES Y METODOS EmbriologiaKarla VásquezNessuna valutazione finora
- EPA 452 - Tecnologia de Control de Contaminacion Del AireDocumento6 pagineEPA 452 - Tecnologia de Control de Contaminacion Del AireCesar Muñoz OssesNessuna valutazione finora
- TD Nº1 Estatica de Los FluidosDocumento8 pagineTD Nº1 Estatica de Los FluidosJorge Luis PerezNessuna valutazione finora
- Flujo de Agua SubterraneaDocumento12 pagineFlujo de Agua SubterraneaCarlos Saldaña ParedesNessuna valutazione finora
- Diseño Antena para TDTDocumento1 paginaDiseño Antena para TDTJose AngelNessuna valutazione finora
- Equilibrio Electrolítico, Balance Hídrico Y Equilibrio Ácido-Base de La SangreDocumento3 pagineEquilibrio Electrolítico, Balance Hídrico Y Equilibrio Ácido-Base de La SangreAracely Rosa Ruiz MandujanoNessuna valutazione finora
- Reveladora AutomáticaDocumento9 pagineReveladora AutomáticaALE X RAY20% (5)