Potrebbero piacerti anche
- Mineral Trioxide Aggregate (MTA) Vs Calcium Hydroxide in Direct Pulp Capping-Literature ReviewDocumento7 pagineMineral Trioxide Aggregate (MTA) Vs Calcium Hydroxide in Direct Pulp Capping-Literature ReviewNanda WirawanNessuna valutazione finora
- Gingival Retraction Techniques: A Review: Dental Update April 2018Documento10 pagineGingival Retraction Techniques: A Review: Dental Update April 2018Varun bharathiNessuna valutazione finora
- Perawatan Periodontal Drg. Puspito Ratih H MDSC, SP - Perio Nanda WirawanDocumento5 paginePerawatan Periodontal Drg. Puspito Ratih H MDSC, SP - Perio Nanda WirawanNanda WirawanNessuna valutazione finora
- Alveolar Ridge Rehabilitation To Increase Full Denture Retention and StabilityDocumento5 pagineAlveolar Ridge Rehabilitation To Increase Full Denture Retention and StabilityArin Nanda Sekar PalupiNessuna valutazione finora
- DVI DR HengkyDocumento3 pagineDVI DR HengkyPutu Ananta100% (1)
- 298931Documento4 pagine298931Boss RoxNessuna valutazione finora
- Perawatan PeriodontalDocumento84 paginePerawatan PeriodontalNanda WirawanNessuna valutazione finora
- Daily LiveDocumento1 paginaDaily LiveNanda WirawanNessuna valutazione finora
- Perkalian Vektor CatatanDocumento3 paginePerkalian Vektor CatatanNanda WirawanNessuna valutazione finora
- ProQuestDocuments 2015-07-26Documento10 pagineProQuestDocuments 2015-07-26Nanda WirawanNessuna valutazione finora
- Lip and Palate Reconstruction On Median Cerebrofacial Malformation PatientDocumento5 pagineLip and Palate Reconstruction On Median Cerebrofacial Malformation PatientAgus MarsyalNessuna valutazione finora
- Blok 4Documento12 pagineBlok 4Nanda WirawanNessuna valutazione finora
- JurDocumento6 pagineJurNanda WirawanNessuna valutazione finora
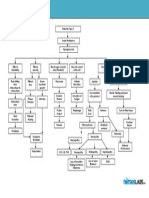
- Diabetes Mellitus Type 2 Schematic DiagramDocumento1 paginaDiabetes Mellitus Type 2 Schematic DiagramkurniaadhiNessuna valutazione finora
- ProQuestDocuments 2014-10-06Documento14 pagineProQuestDocuments 2014-10-06Nanda WirawanNessuna valutazione finora
- X RayDocumento4 pagineX RayNanda WirawanNessuna valutazione finora
- Jur 2Documento4 pagineJur 2Nanda WirawanNessuna valutazione finora
- DehydratingDocumento11 pagineDehydratingNanda WirawanNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- IDL6543 ModuleRubricDocumento2 pagineIDL6543 ModuleRubricSteiner MarisNessuna valutazione finora
- 01 IntroductionDocumento15 pagine01 IntroductionAli FarhatNessuna valutazione finora
- Creative LibrarianDocumento13 pagineCreative LibrarianulorNessuna valutazione finora
- Planning Theory Syllabus - 2016Documento24 paginePlanning Theory Syllabus - 2016LakshmiRaviChanduKolusuNessuna valutazione finora
- ITP - Plaster WorkDocumento1 paginaITP - Plaster Workmahmoud ghanemNessuna valutazione finora
- 8 Lesson 13 Viking FranceDocumento2 pagine8 Lesson 13 Viking Franceapi-332379661Nessuna valutazione finora
- Daily Lesson Log (English)Documento8 pagineDaily Lesson Log (English)Julius Baldivino88% (8)
- Citroen CX Manual Series 2 PDFDocumento646 pagineCitroen CX Manual Series 2 PDFFilipe Alberto Magalhaes0% (1)
- Describe an English lesson you enjoyed.: 多叔逻辑口语,中国雅思口语第一品牌 公共微信: ddielts 新浪微博@雅思钱多多Documento7 pagineDescribe an English lesson you enjoyed.: 多叔逻辑口语,中国雅思口语第一品牌 公共微信: ddielts 新浪微博@雅思钱多多Siyeon YeungNessuna valutazione finora
- Phase DiagramDocumento3 paginePhase DiagramTing TCNessuna valutazione finora
- Sap EwmDocumento2 pagineSap EwmsirivirishiNessuna valutazione finora
- Exp - P7 - UPCTDocumento11 pagineExp - P7 - UPCTSiddesh PatilNessuna valutazione finora
- Lesson 2 (Probability of An Event)Documento4 pagineLesson 2 (Probability of An Event)MarlNessuna valutazione finora
- Dady - Piernas LargasDocumento12 pagineDady - Piernas LargasSarha NietoNessuna valutazione finora
- Aspen Plus User ModelsDocumento339 pagineAspen Plus User Modelskiny81100% (1)
- Feasibility and Optimization of Dissimilar Laser Welding ComponentsDocumento366 pagineFeasibility and Optimization of Dissimilar Laser Welding Componentskaliappan45490Nessuna valutazione finora
- 05-11 Trainer Interview QuestionsDocumento8 pagine05-11 Trainer Interview QuestionsqulaityNessuna valutazione finora
- BC 672772 RBRS Service TraningDocumento385 pagineBC 672772 RBRS Service TraningTeknik Makina100% (2)
- Input and Output Statements PDFDocumento11 pagineInput and Output Statements PDFRajendra BuchadeNessuna valutazione finora
- 240-56062705 RTV Silicone Rubber Insulator Coating and Shed Extender Supplier StandardDocumento10 pagine240-56062705 RTV Silicone Rubber Insulator Coating and Shed Extender Supplier StandardJane ChatsiriphatthanaNessuna valutazione finora
- Bearing TypesDocumento5 pagineBearing TypesWayuNessuna valutazione finora
- History Homework Help Ks3Documento8 pagineHistory Homework Help Ks3afetnjvog100% (1)
- Plane TrigonometryDocumento545 paginePlane Trigonometrygnavya680Nessuna valutazione finora
- Technical Test 03Documento13 pagineTechnical Test 03KartikNessuna valutazione finora
- Bosch Injectors and OhmsDocumento6 pagineBosch Injectors and OhmsSteve WrightNessuna valutazione finora
- Assistant Bookkeeper Resume Sample - Best Format - Great Sample ResumeDocumento4 pagineAssistant Bookkeeper Resume Sample - Best Format - Great Sample ResumedrustagiNessuna valutazione finora
- Sai Deepa Rock Drills: Unless Otherwise Specified ToleranceDocumento1 paginaSai Deepa Rock Drills: Unless Otherwise Specified ToleranceRavi BabaladiNessuna valutazione finora
- EE360 - Magnetic CircuitsDocumento48 pagineEE360 - Magnetic Circuitsبدون اسمNessuna valutazione finora
- Catalog NeosetDocumento173 pagineCatalog NeosetCarmen Draghia100% (1)
- Eurocode Conference 2023 Seters Van Eurocode 7Documento33 pagineEurocode Conference 2023 Seters Van Eurocode 7Rodolfo BlanchiettiNessuna valutazione finora