Potrebbero piacerti anche
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- UojavaDocumento296 pagineUojavaBrandon WintersNessuna valutazione finora
- MC-10139924-9999 DodgeDocumento6 pagineMC-10139924-9999 DodgePaulino SobrinhoNessuna valutazione finora
- BCA 403 (File & Data Structure)Documento94 pagineBCA 403 (File & Data Structure)neerukumari1100% (1)
- An Introduction To NAND FlashDocumento9 pagineAn Introduction To NAND FlashabhijitchNessuna valutazione finora
- 1.1 Overview ProgrammingDocumento20 pagine1.1 Overview Programmingpatrick rollodaNessuna valutazione finora
- Toshiba 8x TranslateDocumento7 pagineToshiba 8x TranslatealexandrNessuna valutazione finora
- Fortios v6.4.4 Release NotesDocumento44 pagineFortios v6.4.4 Release NotesMarkNessuna valutazione finora
- I2C - Two-Wire Peripheral Interface - For ArduinoDocumento46 pagineI2C - Two-Wire Peripheral Interface - For ArduinoFrits LastNessuna valutazione finora
- Act10 InstrumentationDocumento4 pagineAct10 InstrumentationErvin MedranoNessuna valutazione finora
- Factura TabletaDocumento1 paginaFactura TabletabetaproiectNessuna valutazione finora
- Qbasic Tutorial For Beginners and NewbiesDocumento23 pagineQbasic Tutorial For Beginners and NewbiesBay BunkerNessuna valutazione finora
- BR SN3000 SeriesDocumento9 pagineBR SN3000 Seriessupriono legiminNessuna valutazione finora
- Workbook EtherNetIP KR C4 V2 enDocumento241 pagineWorkbook EtherNetIP KR C4 V2 enRuben Gaytan LealNessuna valutazione finora
- UniConn Reference Guide Ver F - 3953183Documento567 pagineUniConn Reference Guide Ver F - 3953183molanoavila100% (3)
- HTTP - App - Utu.ac - in - Utuexmanagement - Exammsters - Syllabus - CE2010-Operating System1Documento4 pagineHTTP - App - Utu.ac - in - Utuexmanagement - Exammsters - Syllabus - CE2010-Operating System1ꌩꍏꌗꃅꋪꍏꀭ T͡ᎻმƘ๏ԻNessuna valutazione finora
- CISP 1610 - Programming in C++ Final Examination (Tax Calculation)Documento3 pagineCISP 1610 - Programming in C++ Final Examination (Tax Calculation)SolutionZIPNessuna valutazione finora
- How To Recover Overwritten - Replaced Excel - Word Document - EaseUSDocumento8 pagineHow To Recover Overwritten - Replaced Excel - Word Document - EaseUShemant kumarNessuna valutazione finora
- Software Service Kit For Vacon 100 - User Manual: Received All The Necessary Parts!Documento2 pagineSoftware Service Kit For Vacon 100 - User Manual: Received All The Necessary Parts!قلمي كنزىNessuna valutazione finora
- Security PsAdminDocumento28 pagineSecurity PsAdminRiyaz AhamedNessuna valutazione finora
- MCA SyllabusDocumento17 pagineMCA Syllabusi2bruasNessuna valutazione finora
- Schematic Asus k43sd Rev 2.2Documento3 pagineSchematic Asus k43sd Rev 2.2JoungAmbon43% (7)
- Emb PIC Charles Kim Chap2Documento2 pagineEmb PIC Charles Kim Chap2subiNessuna valutazione finora
- Windows Installation Using Flash DriveDocumento1 paginaWindows Installation Using Flash DriveTheoSebastianNessuna valutazione finora
- How To Write A Good Bug ReportDocumento4 pagineHow To Write A Good Bug ReportPavan Kumar BeemidiNessuna valutazione finora
- RG 0005 00 en Reference Guide For Dmweb APIDocumento36 pagineRG 0005 00 en Reference Guide For Dmweb APIASI JOBNessuna valutazione finora
- Emulex Drivers For Vmware Esxi For Lightpulse Adapters Release NotesDocumento5 pagineEmulex Drivers For Vmware Esxi For Lightpulse Adapters Release NotesJohanz RoqueNessuna valutazione finora
- Microsoft Visual Basic 6 History)Documento7 pagineMicrosoft Visual Basic 6 History)Abdul Majeed Khan100% (3)
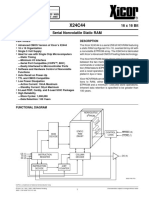
- X24C44 256 Bit 16 X 16 Bit: Features DescriptionDocumento16 pagineX24C44 256 Bit 16 X 16 Bit: Features DescriptionMarinaBogaoNessuna valutazione finora
- Files Bus IntelwayDocumento6 pagineFiles Bus IntelwayMichael HuarachaNessuna valutazione finora
- Ps3 Nor Manager v1Documento19 paginePs3 Nor Manager v1Lisarte BarbosaNessuna valutazione finora