Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- E7d61 139.new Directions in Race Ethnicity and CrimeDocumento208 pagineE7d61 139.new Directions in Race Ethnicity and CrimeFlia Rincon Garcia SoyGabyNessuna valutazione finora
- Publish To The World: Presentations, Research Papers, Legal Documents, and MoreDocumento3 paginePublish To The World: Presentations, Research Papers, Legal Documents, and MoreMarcialRuizNessuna valutazione finora
- Untitled 1Documento3 pagineUntitled 1MarcialRuizNessuna valutazione finora
- Untitled 1Documento3 pagineUntitled 1MarcialRuizNessuna valutazione finora
- Untitled 1Documento3 pagineUntitled 1MarcialRuizNessuna valutazione finora
- Doki DokiDocumento4 pagineDoki DokiMarcialRuizNessuna valutazione finora
- Untitled 1Documento3 pagineUntitled 1MarcialRuizNessuna valutazione finora
- Publish To The World: Presentations, Research Papers, Legal Documents, and MoreDocumento3 paginePublish To The World: Presentations, Research Papers, Legal Documents, and MoreMarcialRuizNessuna valutazione finora
- Publish To The World: Presentations, Research Papers, Legal Documents, and MoreDocumento3 paginePublish To The World: Presentations, Research Papers, Legal Documents, and MoreMarcialRuizNessuna valutazione finora
- Publish To The World: Presentations, Research Papers, Legal Documents, and MoreDocumento3 paginePublish To The World: Presentations, Research Papers, Legal Documents, and MoreMarcialRuizNessuna valutazione finora
- Publish To The World: Presentations, Research Papers, Legal Documents, and MoreDocumento3 paginePublish To The World: Presentations, Research Papers, Legal Documents, and MoreMarcialRuizNessuna valutazione finora
- Publish To The World: Presentations, Research Papers, Legal Documents, and MoreDocumento3 paginePublish To The World: Presentations, Research Papers, Legal Documents, and MoreMarcialRuizNessuna valutazione finora
- Turbulence Modelling For CFD by Hrvoje JasakDocumento51 pagineTurbulence Modelling For CFD by Hrvoje JasakAfiq WitriNessuna valutazione finora
- Publish To The World: Presentations, Research Papers, Legal Documents, and MoreDocumento3 paginePublish To The World: Presentations, Research Papers, Legal Documents, and MoreMarcialRuizNessuna valutazione finora
- Publish To The World: Presentations, Research Papers, Legal Documents, and MoreDocumento3 paginePublish To The World: Presentations, Research Papers, Legal Documents, and MoreMarcialRuizNessuna valutazione finora
- Start Uploading: Publish To The Largest Online Library For The World To SeeDocumento13 pagineStart Uploading: Publish To The Largest Online Library For The World To SeeSreenivasa Reddy PaidalaNessuna valutazione finora
- Publish To The World: Presentations, Research Papers, Legal Documents, and MoreDocumento3 paginePublish To The World: Presentations, Research Papers, Legal Documents, and MoreMarcialRuizNessuna valutazione finora
- Publish To The World: Presentations, Research Papers, Legal Documents, and MoreDocumento3 paginePublish To The World: Presentations, Research Papers, Legal Documents, and MoreMarcialRuizNessuna valutazione finora
- Publish To The World: Presentations, Research Papers, Legal Documents, and MoreDocumento3 paginePublish To The World: Presentations, Research Papers, Legal Documents, and MoreMarcialRuizNessuna valutazione finora
- Publish To The World: Presentations, Research Papers, Legal Documents, and MoreDocumento3 paginePublish To The World: Presentations, Research Papers, Legal Documents, and MoreMarcialRuizNessuna valutazione finora
- Publish To The World: Presentations, Research Papers, Legal Documents, and MoreDocumento3 paginePublish To The World: Presentations, Research Papers, Legal Documents, and MoreMarcialRuizNessuna valutazione finora
- How To Build ToolchainDocumento13 pagineHow To Build ToolchainFJRojkinNessuna valutazione finora
- VandV PDF PDFDocumento44 pagineVandV PDF PDFMarcialRuizNessuna valutazione finora
- DWQQDocumento3 pagineDWQQMarcialRuizNessuna valutazione finora
- Publish To The World: Presentations, Research Papers, Legal Documents, and MoreDocumento3 paginePublish To The World: Presentations, Research Papers, Legal Documents, and MoreMarcialRuizNessuna valutazione finora
- Enunciat PDFDocumento2 pagineEnunciat PDFMarcialRuizNessuna valutazione finora
- Advanced Control Systems: NXT ProjectDocumento2 pagineAdvanced Control Systems: NXT ProjectMarcialRuizNessuna valutazione finora
- Chapter4 PDFDocumento105 pagineChapter4 PDFMarcialRuizNessuna valutazione finora
- Chapter 2 Parameter and State Estimation PDFDocumento27 pagineChapter 2 Parameter and State Estimation PDFMarcialRuizNessuna valutazione finora
- Chapter 3 Control Design PDFDocumento99 pagineChapter 3 Control Design PDFMarcialRuizNessuna valutazione finora
- Sheet-Metal Forming Processes: Group 9 PresentationDocumento90 pagineSheet-Metal Forming Processes: Group 9 PresentationjssrikantamurthyNessuna valutazione finora
- BDocumento28 pagineBLubaNessuna valutazione finora
- Atoma Amd Mol&Us CCTK) : 2Nd ErmDocumento4 pagineAtoma Amd Mol&Us CCTK) : 2Nd ErmjanviNessuna valutazione finora
- 5.1 Behaviour of Water in Rocks and SoilsDocumento5 pagine5.1 Behaviour of Water in Rocks and SoilsHernandez, Mark Jyssie M.Nessuna valutazione finora
- Executive Summary: 2013 Edelman Trust BarometerDocumento12 pagineExecutive Summary: 2013 Edelman Trust BarometerEdelman100% (4)
- Naval TV SystemDocumento24 pagineNaval TV Systemsharmasandeep0010Nessuna valutazione finora
- Pam8610 PDFDocumento15 paginePam8610 PDFRaka Satria PradanaNessuna valutazione finora
- PDS DeltaV SimulateDocumento9 paginePDS DeltaV SimulateJesus JuarezNessuna valutazione finora
- Cap1 - Engineering in TimeDocumento12 pagineCap1 - Engineering in TimeHair Lopez100% (1)
- Exploring-Engineering-And-Technology-Grade-6 1Documento5 pagineExploring-Engineering-And-Technology-Grade-6 1api-349870595Nessuna valutazione finora
- Radio Ac DecayDocumento34 pagineRadio Ac DecayQassem MohaidatNessuna valutazione finora
- Structural Design Basis ReportDocumento31 pagineStructural Design Basis ReportRajaram100% (1)
- Topic: Grammatical Issues: What Are Parts of Speech?Documento122 pagineTopic: Grammatical Issues: What Are Parts of Speech?AK AKASHNessuna valutazione finora
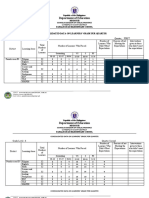
- Department of Education: Consolidated Data On Learners' Grade Per QuarterDocumento4 pagineDepartment of Education: Consolidated Data On Learners' Grade Per QuarterUsagi HamadaNessuna valutazione finora
- .CLP Delta - DVP-ES2 - EX2 - SS2 - SA2 - SX2 - SE&TP-Program - O - EN - 20130222 EDITADODocumento782 pagine.CLP Delta - DVP-ES2 - EX2 - SS2 - SA2 - SX2 - SE&TP-Program - O - EN - 20130222 EDITADOMarcelo JesusNessuna valutazione finora
- How To Install Metal LathDocumento2 pagineHow To Install Metal LathKfir BenishtiNessuna valutazione finora
- CM2192 - High Performance Liquid Chromatography For Rapid Separation and Analysis of A Vitamin C TabletDocumento2 pagineCM2192 - High Performance Liquid Chromatography For Rapid Separation and Analysis of A Vitamin C TabletJames HookNessuna valutazione finora
- Maximum and Minimum PDFDocumento3 pagineMaximum and Minimum PDFChai Usajai UsajaiNessuna valutazione finora
- AYUMJADocumento1 paginaAYUMJASoumet Das SoumetNessuna valutazione finora
- PTW Site Instruction NewDocumento17 paginePTW Site Instruction NewAnonymous JtYvKt5XENessuna valutazione finora
- Bridge Over BrahmaputraDocumento38 pagineBridge Over BrahmaputraRahul DevNessuna valutazione finora
- Uniform Motion WorksheetDocumento8 pagineUniform Motion Worksheetnikhil patro100% (1)
- Poster-Shading PaperDocumento1 paginaPoster-Shading PaperOsama AljenabiNessuna valutazione finora
- 2007 ATRA Seminar ManualDocumento272 pagine2007 ATRA Seminar Manualtroublezaur100% (3)
- Intelligent Status Monitoring System For Port Machinery: RMGC/RTGCDocumento2 pagineIntelligent Status Monitoring System For Port Machinery: RMGC/RTGCfatsahNessuna valutazione finora
- White Paper: 1 Definitive Guide To Data QualityDocumento18 pagineWhite Paper: 1 Definitive Guide To Data QualityGonçalo MartinsNessuna valutazione finora
- KK AggarwalDocumento412 pagineKK AggarwalEnrico Miguel AquinoNessuna valutazione finora
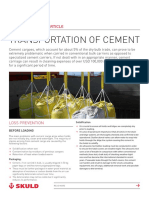
- Transportation of CementDocumento13 pagineTransportation of CementKaustubh Joshi100% (1)