Potrebbero piacerti anche
- Computer Vision: Mohammad Khursani Bin Mohd Shaib 19137 ICTDocumento17 pagineComputer Vision: Mohammad Khursani Bin Mohd Shaib 19137 ICTKhur SaniNessuna valutazione finora
- Mastering Unity: Advanced Techniques for Interactive Design: Unity Game Development SeriesDa EverandMastering Unity: Advanced Techniques for Interactive Design: Unity Game Development SeriesNessuna valutazione finora
- IoT Internet of Things The Ultimate Step-By-Step GuideDa EverandIoT Internet of Things The Ultimate Step-By-Step GuideNessuna valutazione finora
- Unity Pro Series: Engineering Cutting-Edge Game Mechanics: Unity Game Development SeriesDa EverandUnity Pro Series: Engineering Cutting-Edge Game Mechanics: Unity Game Development SeriesNessuna valutazione finora
- Discrete Structure and Automata Theory for Learners: Learn Discrete Structure Concepts and Automata Theory with JFLAPDa EverandDiscrete Structure and Automata Theory for Learners: Learn Discrete Structure Concepts and Automata Theory with JFLAPNessuna valutazione finora
- Sustainable city The Ultimate Step-By-Step GuideDa EverandSustainable city The Ultimate Step-By-Step GuideNessuna valutazione finora
- Tutorial of The Bond GraphDocumento22 pagineTutorial of The Bond Graphsf111Nessuna valutazione finora
- Andrew Hendricks Avl Aero CoefficientsDocumento8 pagineAndrew Hendricks Avl Aero CoefficientsAlvin AnthonyNessuna valutazione finora
- PDFDocumento561 paginePDFOki NurpatriaNessuna valutazione finora
- ScilabDocumento504 pagineScilabRelvin ColónNessuna valutazione finora
- Artificial and Computational Intelligence in GamesDocumento121 pagineArtificial and Computational Intelligence in GamesJair RamosNessuna valutazione finora
- Internet of ThingsDocumento44 pagineInternet of ThingsHaissam KhanNessuna valutazione finora
- Rhapsody Getting Started GuideDocumento110 pagineRhapsody Getting Started GuideDorinAniteiNessuna valutazione finora
- Visnav Lecture NotesDocumento180 pagineVisnav Lecture NotesNitin DeshpandeNessuna valutazione finora
- APP Hardware in The Loop SimulationDocumento11 pagineAPP Hardware in The Loop SimulationAllan0% (1)
- Visual Servoing For A Quadcopter Flight ControlDocumento99 pagineVisual Servoing For A Quadcopter Flight ControlCraneo LocoNessuna valutazione finora
- Multisensor Data FusionDocumento529 pagineMultisensor Data Fusionayouaz3884100% (1)
- MechatronicsDocumento314 pagineMechatronicsEric HabinshutiNessuna valutazione finora
- Data Fusion With The Linear Kalman Filter SlidesDocumento325 pagineData Fusion With The Linear Kalman Filter SlidesAbhishek KumarNessuna valutazione finora
- Multi-Level Architecture For A Swarm of Surveillance RoversDocumento13 pagineMulti-Level Architecture For A Swarm of Surveillance RoversIJRASETPublications100% (1)
- Automated Offline Programming For Robotic Welding SystemDocumento9 pagineAutomated Offline Programming For Robotic Welding SystemJackson Scholze ScholzeNessuna valutazione finora
- Hardware in Loop SimulationDocumento12 pagineHardware in Loop Simulationmullig86Nessuna valutazione finora
- Design and Embedded Control SystemsDocumento267 pagineDesign and Embedded Control Systemsgomesjunior2002Nessuna valutazione finora
- Introduction To SimulinkDocumento123 pagineIntroduction To SimulinkCristhianCoyoNessuna valutazione finora
- Kalman FilterccDocumento604 pagineKalman FilterccChindam Hari PrasadNessuna valutazione finora
- Lanelets: Efficient Map Representation For Autonomous DrivingDocumento6 pagineLanelets: Efficient Map Representation For Autonomous DrivingGokul SoundararajanNessuna valutazione finora
- Kelley IterativeMethodsforLinearandNonlinearEqsDocumento172 pagineKelley IterativeMethodsforLinearandNonlinearEqsRaul Gonzalez100% (1)
- Optimal Predictive Adaptive ControlDocumento425 pagineOptimal Predictive Adaptive ControlGilang SeptianNessuna valutazione finora
- Pantech - Embedded, IoT & Robotic Projects 2021-22Documento10 paginePantech - Embedded, IoT & Robotic Projects 2021-22Kishore RNessuna valutazione finora
- Lecture 5 - Multi-Layer Feedforward Neural Networks Using Matlab Part 1Documento4 pagineLecture 5 - Multi-Layer Feedforward Neural Networks Using Matlab Part 1meazamaliNessuna valutazione finora
- Haptic TechnologyDocumento24 pagineHaptic TechnologyRajpranabhNessuna valutazione finora
- Anna University UG PG Project FormatDocumento69 pagineAnna University UG PG Project Formatramya2212Nessuna valutazione finora
- Matlab For SolidworksDocumento18 pagineMatlab For SolidworksAle' AmoudiNessuna valutazione finora
- Intelligent Control of A Ducted-Fan VTOL UAV With Conventional Control SurfacesDocumento285 pagineIntelligent Control of A Ducted-Fan VTOL UAV With Conventional Control SurfacesTushar KoulNessuna valutazione finora
- Quadruped Walking Running SimulationDocumento49 pagineQuadruped Walking Running SimulationbilynbkNessuna valutazione finora
- Identifying Software Project Risks - An International Delphi Study PDFDocumento33 pagineIdentifying Software Project Risks - An International Delphi Study PDFaditya_chandra_25Nessuna valutazione finora
- Learning Autodesk Inventor 2010-ToCDocumento24 pagineLearning Autodesk Inventor 2010-ToCMaxwellNessuna valutazione finora
- Arduino Based Data Acquisition System Using LabviewDocumento83 pagineArduino Based Data Acquisition System Using LabviewAnonymous S6UCpG1ZuPNessuna valutazione finora
- Model-Based Engineering of Collaborative Embedded SystemsDocumento411 pagineModel-Based Engineering of Collaborative Embedded SystemsBapiNessuna valutazione finora
- Mixed Reality PDFDocumento6 pagineMixed Reality PDFatom tuxNessuna valutazione finora
- 2018 - Design of Real-Time PID Tracking Controller Using Arduino Mega 2560for A Permanent Magnet DC Motor Under Real Disturbances.Documento5 pagine2018 - Design of Real-Time PID Tracking Controller Using Arduino Mega 2560for A Permanent Magnet DC Motor Under Real Disturbances.Sachin ShindeNessuna valutazione finora
- Drone Design490 2015 FinalPresentation LDDSDocumento118 pagineDrone Design490 2015 FinalPresentation LDDShuy2910 dangdangNessuna valutazione finora
- Eth 8596 02Documento205 pagineEth 8596 02AlexandreSidantNessuna valutazione finora
- Applying SysML With MagicDrawDocumento24 pagineApplying SysML With MagicDrawFranz LeónNessuna valutazione finora
- The Fuzzy Logic Control of Aircraft (Farah)Documento120 pagineThe Fuzzy Logic Control of Aircraft (Farah)Rogerio GuahyNessuna valutazione finora
- Mobile Controlled Robotic Arm Using Arduino & Hc-05Documento16 pagineMobile Controlled Robotic Arm Using Arduino & Hc-05anugya sharmaNessuna valutazione finora
- Quad CopterDocumento28 pagineQuad CopterEdwin Joshua SamuelNessuna valutazione finora
- Self Balancing Robot12345 PDFDocumento35 pagineSelf Balancing Robot12345 PDFManasa ManuNessuna valutazione finora
- ARINC Specification 653 Based Real-Time Software EngineeringDocumento12 pagineARINC Specification 653 Based Real-Time Software EngineeringPanneer SelvamNessuna valutazione finora
- QuadCopter FlightDocumento60 pagineQuadCopter Flightasso2412100% (1)
- PRAVEEN SolidworksDocumento19 paginePRAVEEN SolidworksgauravNessuna valutazione finora
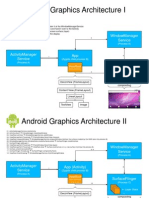
- Android Graphics ArchitectureDocumento19 pagineAndroid Graphics Architectureavinashjha99Nessuna valutazione finora
- Design and Development of Robotic Arm For Cutting TreeDocumento10 pagineDesign and Development of Robotic Arm For Cutting TreeMarko IvanovicNessuna valutazione finora
- Electronics and Computer Science EngineeringDocumento147 pagineElectronics and Computer Science EngineeringAniket ShuklaNessuna valutazione finora
- EE382N-4 Advanced Microcontroller Systems: Accelerators and Co-ProcessorsDocumento75 pagineEE382N-4 Advanced Microcontroller Systems: Accelerators and Co-ProcessorshilgadNessuna valutazione finora
- Lecture 6Documento91 pagineLecture 6hilgadNessuna valutazione finora
- Ee460m Lab ManualDocumento106 pagineEe460m Lab Manualganga_ch1Nessuna valutazione finora
- EE382N-4 Advanced Microcontroller Systems: Linux Driver DevelopmentDocumento55 pagineEE382N-4 Advanced Microcontroller Systems: Linux Driver DevelopmenthilgadNessuna valutazione finora
- EE382N-4 Advanced Microcontroller Systems: Course OverviewDocumento33 pagineEE382N-4 Advanced Microcontroller Systems: Course OverviewhilgadNessuna valutazione finora
- EE382N-4 Advanced Microcontroller Systems: Embedded Software Optimization and Power Aware Software DevelopmentDocumento31 pagineEE382N-4 Advanced Microcontroller Systems: Embedded Software Optimization and Power Aware Software DevelopmenthilgadNessuna valutazione finora
- Research Books PDFDocumento118 pagineResearch Books PDFAnonymous 9Yv6n5qvSNessuna valutazione finora
- Linux Kernel Module Programming GuideDocumento64 pagineLinux Kernel Module Programming Guidelcnblzr3877Nessuna valutazione finora
- Ee445M: Embedded and Real Time Systems: Study Guide Set #01Documento4 pagineEe445M: Embedded and Real Time Systems: Study Guide Set #01hilgadNessuna valutazione finora
- Embedded and Real Time Systems Class Notes Set 01Documento6 pagineEmbedded and Real Time Systems Class Notes Set 01hilgadNessuna valutazione finora
- Linux Kernel Module Programming GuideDocumento64 pagineLinux Kernel Module Programming Guidelcnblzr3877Nessuna valutazione finora
- Sistemas Embarcados e Tempo RealDocumento6 pagineSistemas Embarcados e Tempo RealhilgadNessuna valutazione finora
- Embedded and Real Time Systems Class Notes Set 01Documento6 pagineEmbedded and Real Time Systems Class Notes Set 01hilgadNessuna valutazione finora
- Ee445m Embedded and Real Time Systems Study Guide Set 01Documento4 pagineEe445m Embedded and Real Time Systems Study Guide Set 01hilgadNessuna valutazione finora
- Ros Intro PDFDocumento96 pagineRos Intro PDFhilgadNessuna valutazione finora
- Ee445M: Embedded and Real Time Systems: Study Guide Set #01Documento4 pagineEe445M: Embedded and Real Time Systems: Study Guide Set #01hilgadNessuna valutazione finora
- VSDC Spring 2016 Homework 01Documento12 pagineVSDC Spring 2016 Homework 01hilgadNessuna valutazione finora
- ME397 Intermediate Dynamics Fall 2015 Class Notes 04Documento6 pagineME397 Intermediate Dynamics Fall 2015 Class Notes 04hilgadNessuna valutazione finora
- Harware in The Loop Simulation UUV IEEEDocumento6 pagineHarware in The Loop Simulation UUV IEEEhilgadNessuna valutazione finora
- Esempi BondDocumento14 pagineEsempi Bondalix086Nessuna valutazione finora
- Motion PlanningDocumento67 pagineMotion PlanninghilgadNessuna valutazione finora
- Agilet's GSM GPRS ReferenceDocumento882 pagineAgilet's GSM GPRS ReferencehilgadNessuna valutazione finora
- TPR MM462203Documento14 pagineTPR MM462203hilgadNessuna valutazione finora
- Harware in The Loop Simulation UUV IEEE SiemensDocumento4 pagineHarware in The Loop Simulation UUV IEEE SiemenshilgadNessuna valutazione finora
- Hardware in The Loop Simulation Underwater UnmannedDocumento6 pagineHardware in The Loop Simulation Underwater UnmannedhilgadNessuna valutazione finora
- ControllerDocumento8 pagineControllerhilgadNessuna valutazione finora
- Hardware in The Loop Simulation Underwater UnmannedDocumento6 pagineHardware in The Loop Simulation Underwater UnmannedhilgadNessuna valutazione finora
- 1st National Elimination Metrobank-MTAP-DepEd Math Challenge Grade 6Documento8 pagine1st National Elimination Metrobank-MTAP-DepEd Math Challenge Grade 6Michael FactorNessuna valutazione finora
- Digital Logic Circuits Objective QuestionsDocumento9 pagineDigital Logic Circuits Objective Questionssundar_mohan_2100% (2)
- Total PointsDocumento28 pagineTotal PointsBijuBBahulayanNessuna valutazione finora
- Engineering Failure Analysis-Crack GrowthDocumento27 pagineEngineering Failure Analysis-Crack GrowthchandruNessuna valutazione finora
- Shock and Vibration Analysis Using Ansys MechanicalDocumento54 pagineShock and Vibration Analysis Using Ansys Mechanicaltomekzawistowski100% (2)
- PL SQLDocumento804 paginePL SQLMartin Cruz ValenzuelaNessuna valutazione finora
- Earned Value Calculation WorksheetDocumento2 pagineEarned Value Calculation WorksheetteeabagNessuna valutazione finora
- Clmd4ageneralmathematicsshs - PDF Function (Mathematics) FormulaDocumento1 paginaClmd4ageneralmathematicsshs - PDF Function (Mathematics) FormulaNicole Peña TercianoNessuna valutazione finora
- Structural Analysis I and II - Lecture Notes, Study Material and Important Questions, AnswersDocumento4 pagineStructural Analysis I and II - Lecture Notes, Study Material and Important Questions, AnswersM.V. TV50% (4)
- Upsc Cse Ifos Mathematics Optional Paper 1 Pyqs Till Year 2022 Mindset MakersDocumento98 pagineUpsc Cse Ifos Mathematics Optional Paper 1 Pyqs Till Year 2022 Mindset MakersBarnedNessuna valutazione finora
- Curriculum Vitae Suresh B SrinivasamurthyDocumento22 pagineCurriculum Vitae Suresh B Srinivasamurthybs_suresh1963Nessuna valutazione finora
- (Sergiu T. Chiriacescu (Eds.) ) Stability in The DyDocumento204 pagine(Sergiu T. Chiriacescu (Eds.) ) Stability in The DyHugo CostaNessuna valutazione finora
- Ancova MinitabDocumento26 pagineAncova MinitabmedaliNessuna valutazione finora
- Concrete Technology (CE205) Concrete Technology Laboratory Report Academic Year (2019-2020)Documento10 pagineConcrete Technology (CE205) Concrete Technology Laboratory Report Academic Year (2019-2020)Hawar AhmadNessuna valutazione finora
- Swan SoftDocumento90 pagineSwan Softandreeaoana45Nessuna valutazione finora
- Dtn410k USER Manual Rev01Documento71 pagineDtn410k USER Manual Rev01Franco VF100% (7)
- Descriptive Measures (Lý Thuyết + Excel)Documento66 pagineDescriptive Measures (Lý Thuyết + Excel)Xuan Lien HoangNessuna valutazione finora
- Audit Sampling: Quiz 2Documento8 pagineAudit Sampling: Quiz 2weqweqwNessuna valutazione finora
- Net Force and Acceleration Practice Worksheet KEY 4Documento1 paginaNet Force and Acceleration Practice Worksheet KEY 4brooo imlikeoveritNessuna valutazione finora
- 0580 s19 QP 11Documento12 pagine0580 s19 QP 11Dedy SahanaNessuna valutazione finora
- Unit 1 Product Cycle and Design Process PDFDocumento49 pagineUnit 1 Product Cycle and Design Process PDFMeet patelNessuna valutazione finora
- Branson 1965 PDFDocumento16 pagineBranson 1965 PDFTatiane MagaNessuna valutazione finora
- Signal and Design Integrity-HangzhouSI2Documento56 pagineSignal and Design Integrity-HangzhouSI2shaan_patilNessuna valutazione finora
- D Epartment of E Ducation: Business MathDocumento1 paginaD Epartment of E Ducation: Business MathJessel CarilloNessuna valutazione finora
- Event History Modeling A Guide For Social Scientists PDFDocumento2 pagineEvent History Modeling A Guide For Social Scientists PDFCassie0% (1)
- The Golden Ratio & The Golden Rectangle: Abstract-This Report Is Showing The ImportanceDocumento5 pagineThe Golden Ratio & The Golden Rectangle: Abstract-This Report Is Showing The ImportanceKhaled HANessuna valutazione finora
- Letter: Flight of An Aeroplane With Solid-State PropulsionDocumento8 pagineLetter: Flight of An Aeroplane With Solid-State PropulsionMuhammad Faiz BaihaqiNessuna valutazione finora
- Selina Solutions For Class 9 Physics Chapter 2 Motion in One DimensionDocumento39 pagineSelina Solutions For Class 9 Physics Chapter 2 Motion in One DimensionABHISHEK THAKURNessuna valutazione finora
- Unit 3Documento11 pagineUnit 3maNessuna valutazione finora
- Chapter 8Documento34 pagineChapter 8Ummu Fahmi FikriyantoNessuna valutazione finora