Potrebbero piacerti anche
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- A List of Justin - TV ErrorsDocumento1 paginaA List of Justin - TV ErrorsJustin Kan100% (1)
- Bandpass Output For 101 HZ Sine Wave Frequency (HZ) Amplitude (V)Documento4 pagineBandpass Output For 101 HZ Sine Wave Frequency (HZ) Amplitude (V)Justin KanNessuna valutazione finora
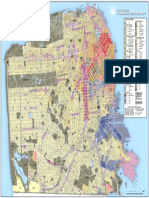
- San Francisco Zoning MapDocumento1 paginaSan Francisco Zoning MapJustin KanNessuna valutazione finora
- Old JTV Hiring PresentationDocumento7 pagineOld JTV Hiring PresentationJustin Kan100% (1)
- Phys 205 La 10Documento4 paginePhys 205 La 10Justin KanNessuna valutazione finora
- Experiment 1 V (V) I (Ma) P V I (MW)Documento3 pagineExperiment 1 V (V) I (Ma) P V I (MW)Justin KanNessuna valutazione finora
- Phys 205 La 4Documento3 paginePhys 205 La 4Justin KanNessuna valutazione finora
- Phys 205 La 5Documento2 paginePhys 205 La 5Justin KanNessuna valutazione finora
- Phys382 Signal Analysis 2Documento4 paginePhys382 Signal Analysis 2Justin KanNessuna valutazione finora
- Phys 205 La 3Documento6 paginePhys 205 La 3Justin KanNessuna valutazione finora
- Phil 265 Critical Essay 3Documento6 paginePhil 265 Critical Essay 3Justin KanNessuna valutazione finora
- Phil 120 Essay 2Documento6 paginePhil 120 Essay 2Justin KanNessuna valutazione finora
- Phil 265 Myth of Passage Micro EssayDocumento1 paginaPhil 265 Myth of Passage Micro EssayJustin KanNessuna valutazione finora
- Phil 120 Essay 3Documento7 paginePhil 120 Essay 3Justin KanNessuna valutazione finora
- Phil 120 Essay 1Documento5 paginePhil 120 Essay 1Justin KanNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Syllabus For M.S. (Pharm.) / PH.D Courses, Offered by NIPER - HyderabadDocumento51 pagineSyllabus For M.S. (Pharm.) / PH.D Courses, Offered by NIPER - HyderabadAshok YadavNessuna valutazione finora
- Kramer 1995Documento14 pagineKramer 1995elkadaouisoukainaNessuna valutazione finora
- Mrsptu B.tech. 1st Year Syllabus 2016 Batch Onwards Updated On 16.7.2016Documento28 pagineMrsptu B.tech. 1st Year Syllabus 2016 Batch Onwards Updated On 16.7.2016ravisingla22Nessuna valutazione finora
- Organic Chemistry 2022 Global Tenth Edition Leroy Simek Wade Jan Jan Simek Organic Chemistry Global Edition Full ChapterDocumento68 pagineOrganic Chemistry 2022 Global Tenth Edition Leroy Simek Wade Jan Jan Simek Organic Chemistry Global Edition Full Chapterthomas.robinson634100% (5)
- Chemical KineticsDocumento118 pagineChemical KineticsHarsh PipariyaNessuna valutazione finora
- Christopher R. Kitchin-Optical Astronomical Spectroscopy-IOP Institute of Physics 1995 (1995)Documento268 pagineChristopher R. Kitchin-Optical Astronomical Spectroscopy-IOP Institute of Physics 1995 (1995)carolinasilvagNessuna valutazione finora
- 2009-10 M. Pharm SyllabusDocumento84 pagine2009-10 M. Pharm Syllabusshahan_097Nessuna valutazione finora
- Race Ends Here GilroyDocumento12 pagineRace Ends Here GilroyAngélica VeraNessuna valutazione finora
- J. Org. Chem. 2014, 79, 8522Documento11 pagineJ. Org. Chem. 2014, 79, 8522Dianita Ruano ContrerasNessuna valutazione finora
- G#5 CT Scan & MRIDocumento6 pagineG#5 CT Scan & MRIAbdul RehmanNessuna valutazione finora
- Water - H2O - PubChemDocumento48 pagineWater - H2O - PubChemBrillyan DeavantiNessuna valutazione finora
- Polyoxyethylene Exploring Structure Properties and ApplicationsDocumento7 paginePolyoxyethylene Exploring Structure Properties and ApplicationslarbibenhadjarasmaNessuna valutazione finora
- Journal of Chemical Education NMR AnetolDocumento3 pagineJournal of Chemical Education NMR AnetolveromendoNessuna valutazione finora
- Iminium Salt in Organic Synthesis (New) NumberedDocumento85 pagineIminium Salt in Organic Synthesis (New) Numberedbosejohn100% (1)
- Spectrometric Identification of Organic Compounds, Seventh Edition 2005Documento550 pagineSpectrometric Identification of Organic Compounds, Seventh Edition 2005Richard CMNessuna valutazione finora
- Chemical Constituents From The Colombian Medicinal Plant Maytenus LaevisDocumento6 pagineChemical Constituents From The Colombian Medicinal Plant Maytenus LaevisCarlos Sopán BenauteNessuna valutazione finora
- How To Set Up An MQMAS On Topspin GuideDocumento16 pagineHow To Set Up An MQMAS On Topspin GuideStephen DayNessuna valutazione finora
- MatStudio CASTEP GuideDocumento219 pagineMatStudio CASTEP GuideAnish KumarNessuna valutazione finora
- 15 Analytical Profiles of Drug Substances, Vol 15 PDFDocumento807 pagine15 Analytical Profiles of Drug Substances, Vol 15 PDFIKSAN NASYRULLOHNessuna valutazione finora
- NMR Aromatic Proton Coupling: DoubletDocumento1 paginaNMR Aromatic Proton Coupling: DoubletCarlo SantosNessuna valutazione finora
- Tablas Elucidacion Estructural (Protoì - N y Carbono)Documento54 pagineTablas Elucidacion Estructural (Protoì - N y Carbono)Álex Martínez AriasNessuna valutazione finora
- Electron Spin Resonance - It's Principles and ApplicationsDocumento42 pagineElectron Spin Resonance - It's Principles and Applicationsmohitdewani94% (32)
- 7.0 Tesla MRI Brain AtlasDocumento569 pagine7.0 Tesla MRI Brain AtlasJosé Luis Chaves100% (4)
- 28.3 Physica UG Question Paper Pattern of 5 & 6 Sem PDFDocumento41 pagine28.3 Physica UG Question Paper Pattern of 5 & 6 Sem PDFthomasgunaseelanNessuna valutazione finora
- 2013 Bruker ProductOverviewDocumento117 pagine2013 Bruker ProductOverviewNaheed Malik100% (1)
- IB Questionbank Chemistry 1Documento19 pagineIB Questionbank Chemistry 1zarna nirmal rawalNessuna valutazione finora
- Andrija PUHARICH - ELF-EMF Pollution Shield (Transformation Into Scalar Longitudinal Waves)Documento7 pagineAndrija PUHARICH - ELF-EMF Pollution Shield (Transformation Into Scalar Longitudinal Waves)Rômulo Raulino100% (1)
- NMR: Theory - Chemistry LibreTexts PDFDocumento32.767 pagineNMR: Theory - Chemistry LibreTexts PDFCrist John PastorNessuna valutazione finora
- ESR Basics 2 2007Documento50 pagineESR Basics 2 2007FranciscoNessuna valutazione finora
- Olea PackagesDocumento1 paginaOlea Packagesmaha jamoukhaNessuna valutazione finora