Potrebbero piacerti anche
- GA - Timetable Problem 2Documento61 pagineGA - Timetable Problem 2Rani GangishettiNessuna valutazione finora
- Genetic AlgorithmDocumento14 pagineGenetic AlgorithmakbarNessuna valutazione finora
- 10 GaDocumento20 pagine10 GaNoor WaleedNessuna valutazione finora
- Genetic Algorithm ReportDocumento7 pagineGenetic Algorithm ReportNidhi Shah100% (1)
- ML Unit IVDocumento27 pagineML Unit IVVasu 22Nessuna valutazione finora
- Genetic AlgorithmsDocumento14 pagineGenetic AlgorithmsMohsin MuzawarNessuna valutazione finora
- Simple Genetic AlgorithmDocumento12 pagineSimple Genetic AlgorithmAdam GilangNessuna valutazione finora
- Notes - Unit III Genetic Algorithms - PrintDocumento19 pagineNotes - Unit III Genetic Algorithms - PrintMohamed ShaaheenNessuna valutazione finora
- Notes On Genetic AlgorithmDocumento6 pagineNotes On Genetic Algorithmantony1993Nessuna valutazione finora
- (Peter Leow) Genetic Algorithms Demystified UnravDocumento58 pagine(Peter Leow) Genetic Algorithms Demystified Unravasdsad123mNessuna valutazione finora
- Simple Genetic AlgorithmDocumento12 pagineSimple Genetic AlgorithmGama Wirata PutraNessuna valutazione finora
- Chapter+3+ +GA+ (Population+Representation+ +Fitness+Function)Documento44 pagineChapter+3+ +GA+ (Population+Representation+ +Fitness+Function)Ahmed EssamNessuna valutazione finora
- Soft Computing Unit-5 by Arun Pratap SinghDocumento78 pagineSoft Computing Unit-5 by Arun Pratap SinghArunPratapSingh100% (1)
- Genetic AlgorithmDocumento47 pagineGenetic AlgorithmPritesh RajpurohitNessuna valutazione finora
- Figure Above: Biological Inspiration of Genetic AlgorithmDocumento6 pagineFigure Above: Biological Inspiration of Genetic AlgorithmPartha Pratim MazumderNessuna valutazione finora
- Introduction To Genetic Algorithms (GA)Documento14 pagineIntroduction To Genetic Algorithms (GA)Somya AryaNessuna valutazione finora
- 5 UnitDocumento16 pagine5 Unitpiyushsukhija52Nessuna valutazione finora
- Optimization Techniques: Genetic Algorithms (GA) and Particle Swarm Optimization (PSO)Documento21 pagineOptimization Techniques: Genetic Algorithms (GA) and Particle Swarm Optimization (PSO)Suresh K DamodaranNessuna valutazione finora
- Genetic Algorithms: Muhannad HarrimDocumento44 pagineGenetic Algorithms: Muhannad HarrimDebabrata PalNessuna valutazione finora
- Genetic Algorithms: University of Illinois, USADocumento29 pagineGenetic Algorithms: University of Illinois, USANora Chan NasserNessuna valutazione finora
- Topic 4 - Evolutionary AlgorithmDocumento100 pagineTopic 4 - Evolutionary AlgorithmNurkhairunnisa' AzhanNessuna valutazione finora
- The Implementation of Simple Genetic Algorithm in A Simple Card Dividing GameDocumento8 pagineThe Implementation of Simple Genetic Algorithm in A Simple Card Dividing GameChristopher AndrewNessuna valutazione finora
- Genetic Algorithms: University of Illinois, USADocumento29 pagineGenetic Algorithms: University of Illinois, USAMose DelPozzoNessuna valutazione finora
- Recessive Trait Cross Over Approach of Gas Population Inheritance For Evolutionary OptimisationDocumento10 pagineRecessive Trait Cross Over Approach of Gas Population Inheritance For Evolutionary OptimisationAhmed Medhat YoussefNessuna valutazione finora
- Genetic AlgorithmDocumento4 pagineGenetic AlgorithmVishal SinghaNessuna valutazione finora
- Genetic AlgorithmDocumento40 pagineGenetic Algorithmpulkit guptaNessuna valutazione finora
- Genetic AlgorithmsDocumento19 pagineGenetic AlgorithmsJonecis DayapNessuna valutazione finora
- MSc-210916 (Genetic Algorith)Documento16 pagineMSc-210916 (Genetic Algorith)PrantaNessuna valutazione finora
- Genetic Algorithms: 4.1 Quick OverviewDocumento12 pagineGenetic Algorithms: 4.1 Quick Overviewseunnuga93Nessuna valutazione finora
- 83.1 Using A Real Chillomosome A Genetic Algoiuthm ForDocumento4 pagine83.1 Using A Real Chillomosome A Genetic Algoiuthm ForÉtoile FilanteNessuna valutazione finora
- Lecture 6 Genetic AlgorithmsDocumento16 pagineLecture 6 Genetic AlgorithmsM. Talha NadeemNessuna valutazione finora
- The Genetic Algorithm For Finding The Maxima of Single-Variable FunctionsDocumento9 pagineThe Genetic Algorithm For Finding The Maxima of Single-Variable FunctionsinventyNessuna valutazione finora
- The Presentation of A Genetic Algorithm To Solve Steiner TreeDocumento3 pagineThe Presentation of A Genetic Algorithm To Solve Steiner TreeATSNessuna valutazione finora
- in Case of 8 Queen Problem Answer The Following Questions A. What Could Be The Initial Population?Documento4 paginein Case of 8 Queen Problem Answer The Following Questions A. What Could Be The Initial Population?hijab zahraNessuna valutazione finora
- Genetic AlgorithmDocumento8 pagineGenetic AlgorithmFabiano Rodrigues PereiraNessuna valutazione finora
- Genetic Algorithm in Machine LearningDocumento6 pagineGenetic Algorithm in Machine LearningPrafull SawantNessuna valutazione finora
- Adsa End Sem ImpDocumento61 pagineAdsa End Sem ImpsiddhantNessuna valutazione finora
- Genetic AlgorithmDocumento83 pagineGenetic AlgorithmSiddhesh KudavNessuna valutazione finora
- FALLSEM2023-24 SWE1002 TH VL2023240103269 2023-11-07 Reference-Material-IDocumento35 pagineFALLSEM2023-24 SWE1002 TH VL2023240103269 2023-11-07 Reference-Material-IKartik SoniNessuna valutazione finora
- Ga02 Genetic Algorithms DemystifiedDocumento8 pagineGa02 Genetic Algorithms DemystifiedIoachim DipseNessuna valutazione finora
- AIMLDocumento4 pagineAIMLojas.s.dixitNessuna valutazione finora
- Enetic Lgorithm: Prepared byDocumento30 pagineEnetic Lgorithm: Prepared byNidhi Shah100% (2)
- Genetic Algorithms and Very Fast Simulated Reannealing: A ComparisonDocumento19 pagineGenetic Algorithms and Very Fast Simulated Reannealing: A ComparisonLester IngberNessuna valutazione finora
- Biologically Inspired Computing: Operators For Evolutionary AlgorithmsDocumento24 pagineBiologically Inspired Computing: Operators For Evolutionary Algorithmskulkarnigopal20Nessuna valutazione finora
- Mining Association Rules Using Genetic Algorithm: The Role of Estimation ParametersDocumento9 pagineMining Association Rules Using Genetic Algorithm: The Role of Estimation ParametersindirasivakumarNessuna valutazione finora
- Module VIDocumento27 pagineModule VIRitesh ChaubeyNessuna valutazione finora
- Introduction To Optimization: What Are Genetic Algorithms?Documento15 pagineIntroduction To Optimization: What Are Genetic Algorithms?kinnukiranNessuna valutazione finora
- A Genetic Algorithm For Function Optimization - A Matlab ImplementationDocumento14 pagineA Genetic Algorithm For Function Optimization - A Matlab ImplementationmahalingamloganathanNessuna valutazione finora
- Unit 4 - Soft Computing - WWW - Rgpvnotes.inDocumento14 pagineUnit 4 - Soft Computing - WWW - Rgpvnotes.inKhyati GargNessuna valutazione finora
- Program: B.E Subject Name: Soft Computing Subject Code: CS-8001 Semester: 8thDocumento14 pagineProgram: B.E Subject Name: Soft Computing Subject Code: CS-8001 Semester: 8thNishant MishraNessuna valutazione finora
- Unit-III Genetic AlgorithmDocumento36 pagineUnit-III Genetic AlgorithmRaman NaamNessuna valutazione finora
- Genetic Algorithm: Manu Dev HembromDocumento17 pagineGenetic Algorithm: Manu Dev HembromManu Dev100% (1)
- Genetic Algorithms: By: Prof. Mahesh MotwaniDocumento29 pagineGenetic Algorithms: By: Prof. Mahesh MotwaniBhuvneshwar Sharma (Bhuvi)Nessuna valutazione finora
- Introduction To Optimization With Genetic AlgorithmDocumento26 pagineIntroduction To Optimization With Genetic AlgorithmAishwarya RaoNessuna valutazione finora
- CSCI 447 Machine Learning: Soft Computing Project #1 Nick Ryhajlo September 26, 2011Documento8 pagineCSCI 447 Machine Learning: Soft Computing Project #1 Nick Ryhajlo September 26, 2011Nick RyhajloNessuna valutazione finora
- Lecture1423722821 56 69Documento14 pagineLecture1423722821 56 69Pavan GuttaNessuna valutazione finora
- Differential Evolution: Fundamentals and ApplicationsDa EverandDifferential Evolution: Fundamentals and ApplicationsNessuna valutazione finora
- Gene Expression Programming: Fundamentals and ApplicationsDa EverandGene Expression Programming: Fundamentals and ApplicationsNessuna valutazione finora
- Evolutionary Algorithms for Food Science and TechnologyDa EverandEvolutionary Algorithms for Food Science and TechnologyNessuna valutazione finora
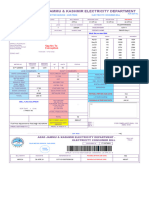
- AJK ONLINE BILLnewDocumento1 paginaAJK ONLINE BILLnewsammeemustaqNessuna valutazione finora
- Solved Idioms From 1971 To 2015 - Updated PDFDocumento58 pagineSolved Idioms From 1971 To 2015 - Updated PDFImranRazaBozdarNessuna valutazione finora
- Pair of WordsDocumento67 paginePair of WordssammeemustaqNessuna valutazione finora
- Pair of WordsDocumento67 paginePair of WordssammeemustaqNessuna valutazione finora
- 2008 - Pietramala - ECMLDocumento16 pagine2008 - Pietramala - ECMLsammeemustaqNessuna valutazione finora
- 04 IHW TextminingDocumento23 pagine04 IHW TextminingsammeemustaqNessuna valutazione finora
- Mann Whitney U: Aim: To Be Able To Apply The Mann Whitney U Test Data and Evaluate Its EffectivenessDocumento16 pagineMann Whitney U: Aim: To Be Able To Apply The Mann Whitney U Test Data and Evaluate Its EffectivenessAshish ThakkarNessuna valutazione finora
- Name: Period: Date:: Math Lab: Explore Transformations of Trig Functions Explore Vertical DisplacementDocumento7 pagineName: Period: Date:: Math Lab: Explore Transformations of Trig Functions Explore Vertical DisplacementShaaminiNessuna valutazione finora
- Medical Technology ScheduleDocumento2 pagineMedical Technology ScheduleCara Veronica MendozaNessuna valutazione finora
- Academics: Qualification Institute Board/University Year %/CGPADocumento1 paginaAcademics: Qualification Institute Board/University Year %/CGPARajesh KandhwayNessuna valutazione finora
- Power Meditation: by Mahaswami MedhiranandaDocumento7 paginePower Meditation: by Mahaswami Medhiranandaanhadbalbir7347Nessuna valutazione finora
- Action Works Coordinator - 5Documento174 pagineAction Works Coordinator - 5api-3712211Nessuna valutazione finora
- The Scientific Method Is An Organized Way of Figuring Something OutDocumento1 paginaThe Scientific Method Is An Organized Way of Figuring Something OutRick A Middleton JrNessuna valutazione finora
- Building and Environment: Edward NGDocumento11 pagineBuilding and Environment: Edward NGauliaNessuna valutazione finora
- Filed: Patrick FisherDocumento43 pagineFiled: Patrick FisherScribd Government DocsNessuna valutazione finora
- No Man Is An Island - Friendship LoyaltyDocumento4 pagineNo Man Is An Island - Friendship LoyaltyBryanNessuna valutazione finora
- Mr. Edel B. Paclian, LPT Ms. Janny Ame Narral, LPT Master of Arts in EducationDocumento34 pagineMr. Edel B. Paclian, LPT Ms. Janny Ame Narral, LPT Master of Arts in EducationEdel Borden PaclianNessuna valutazione finora
- Earthquake EssayDocumento1 paginaEarthquake EssayAnsir Yaqoob100% (1)
- Performance in MarxismDocumento226 paginePerformance in Marxismdeanp97Nessuna valutazione finora
- Position Paper Banning HomeworkDocumento2 paginePosition Paper Banning HomeworkFrances Maya MacombNessuna valutazione finora
- TAFJ-AS JBossInstall v5.2 EAP PDFDocumento33 pagineTAFJ-AS JBossInstall v5.2 EAP PDFrameshNessuna valutazione finora
- Case Study Sustainable ConstructionDocumento5 pagineCase Study Sustainable ConstructionpraisethenordNessuna valutazione finora
- Presentation of Amatillah - SakinahDocumento12 paginePresentation of Amatillah - SakinahFareed Ahmed MemonNessuna valutazione finora
- Block Diagram: GL502VT Repair GuideDocumento7 pagineBlock Diagram: GL502VT Repair GuideRafael SenaNessuna valutazione finora
- Injection Machine RobotDocumento89 pagineInjection Machine Robotphild2na250% (2)
- Regional Directorate General of Public Finance of BucharestDocumento8 pagineRegional Directorate General of Public Finance of BucharestAnna MarissNessuna valutazione finora
- CalibrationDocumento9 pagineCalibrationLuis Gonzalez100% (1)
- Project Management GUIDE 2020: Revision 1Documento27 pagineProject Management GUIDE 2020: Revision 1lorranaNessuna valutazione finora
- Fabrication of Mortar Mixer and CHB Filler PumpDocumento15 pagineFabrication of Mortar Mixer and CHB Filler PumpRenjo Kim VenusNessuna valutazione finora
- Reflection EssayDocumento3 pagineReflection Essayapi-451553720Nessuna valutazione finora
- Fourier Transform Infrared Quantitative Analysis of Sugars and Lignin in Pretreated Softwood Solid ResiduesDocumento12 pagineFourier Transform Infrared Quantitative Analysis of Sugars and Lignin in Pretreated Softwood Solid ResiduesDaisyOctavianiNessuna valutazione finora
- Kindergarten DLL MELC Q2 Week 5 AsfDocumento8 pagineKindergarten DLL MELC Q2 Week 5 AsfDiana Rose AcupeadoNessuna valutazione finora
- Spectrofotometru SpectroDirect (De La Lovibond)Documento360 pagineSpectrofotometru SpectroDirect (De La Lovibond)FlaviusNessuna valutazione finora
- NBA AwarenessDocumento39 pagineNBA AwarenessRaja SekarNessuna valutazione finora
- GPS Equipment CalibrationDocumento10 pagineGPS Equipment CalibrationAishah Drahman100% (1)
- Culture and Cultural GeographyDocumento6 pagineCulture and Cultural GeographySrishti SrivastavaNessuna valutazione finora