Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
cap02TESIS DE INST INY AGUA PDF
Caricato da
Kenny de CornielesTitolo originale
Copyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
cap02TESIS DE INST INY AGUA PDF
Caricato da
Kenny de CornielesCopyright:
Formati disponibili
15
CAPITULO II
MARCO TEORICO
En este captulo se presenta el marco terico de la investigacin, el cual
comprende los antecedentes consultados, la fundamentacin terica y la
definicin de trminos bsicos referentes al tema de la investigacin.
1. Antecedentes de la Investigacin
A continuacin es presentada una sntesis conceptual de las
investigaciones o trabajos realizados sobre problemticas similares, con el
objetivo de obtener un mejor enfoque metodolgico para la investigacin.
Segn Prez (2012), en su investigacin Sistema de control difuso para la
dosificacin de qumica anti incrustante en Planta de Inyeccin de Agua,
Tesis de Grado para la Maestra de Control y Automatizacin de la
Universidad Rafael Belloso Chacin. Dicha investigacin se basa en el diseo
de controlador difuso para la dosificacin de la qumica anti incrustante en la
PIA BA-2-1, enfocndose en la formulacin de las funciones lgicas para la
ejecucin del controlador difuso seleccionado y verificando su funcionamiento
mediante la simulacin del sistema de control difuso en Matlab.
16
Enmarcada en la modalidad de proyecto factible, en la cual se realiz la
identificacin del sistema de inyeccin para modelar el proceso, realizndose
esto por medio del comando IDENT de Matlab, obteniendo de esta manera la
funcin de transferencia del sistema con una aproximacin del 96%, para
luego proceder al diseo de un controlador difuso, creando funciones de
membreca.
En dicho trabajo se realiz la simulacin del sistema de control en lazo
cerrado con el controlador en Simulink, probando distintas condiciones de
entrada, obteniendo as resultados satisfactorios, ya que el error en estado
estacionario tiende a hacerse cero rpidamente. Al mismo tiempo se
realizaron simulaciones aplicando perturbaciones bruscas observndose que
el controlador lograba estabilizar el sistema y corregir el error presente.
De esta investigacin se pueden tomar los aportes de la dinmica de
inyeccin de un sistema de bomba vlvula de control, adems del
procedimiento de identificacin de sistemas por medio de Matlab.
En el trabajo presentado por Pacheco (2007), la investigacin Sistema de
Automatizacin de la Planta de Tratamiento de aguas efluentes de la
termoelctrica Ramn Laguna de Enelgen basado en un control optimo H2
opto al grado de Magister en Control y Automatizacin de Procesos en la
Universidad Rafael Belloso Chacin, basndose esta investigacin en
proporcionar a la empresa Enelgen un sistema automatizado para la planta
17
de tratamiento de aguas efluentes, con el fin de obtener un sistema ms
eficiente por medio de la reutilizacin de esta agua, aplicando las bases del
control optimo H2, el cual fue diseado y simulado.
La investigacin es de campo, de diseo experimental, con una
metodologa basada en la actividad de identificacin de datos para la
obtencin de modelos matemticos, el diseo del sistema automtico y la
evaluacin del mismo. Se lleg a la conclusin de que el control optimo H2
para los procesos de coagulacin y acidificacin, fue el ms apropiado
debido a las caractersticas observadas en la simulacin donde el sistema
estabilizaba con o sin perturbacin. Para el proceso de floculacin se
implanto un sistema de control de relacin, obtenindose para este un control
constante del tratamiento.
Esta investigacin esquematiz el sistema de tratamiento qumico dentro
del proceso de tratamiento de agua, proporciona ampliacin de las opciones
de acciones de control a ser utilizadas como otro aporte de esta
investigacin, adems de las tcnicas de modelado de sistemas qumicos.
Segn Soto (2007), de la Universidad Rafael Belloso Chacin, llev a cabo
la investigacin titulada: Propuesta de un Sistema de Control Automatizado
para la Inyeccin de Aditivos Qumicos en el Tratamiento del Agua de
Alimentacin a las Calderas de la Planta Termoelctrica Ramn Laguna de
ENELGEN, dicha investigacin tuvo como objetivo la propuesta de un
18
sistema de control automatizado para la inyeccin de aditivos qumicos de la
planta de tratamiento de agua, adems de sintetizar una propuesta de
reestructuracin de puntos de medicin de variables para proceder al diseo
de un control automtico eficiente para el control de las variables
identificadas. Adicionalmente propone la instrumentacin necesaria y
demuestra mediante la simulacin el funcionamiento del control propuesto.
Esta investigacin presenta una estructura metodolgica basada en un
tipo de investigacin descriptiva bajo la modalidad de investigacin de
campo. Obtenindose los resultados de los cuales se concluy que los
histricos de datos registrados por la empresa Enelgen no pudieron ser
utilizados para el modelado del sistema, debido a que no era posible la
identificacin de las entradas y las salidas reales del sistema, por lo cual se
realiz la propuesta de redistribuir los puntos de toma de muestras en la
planta. Se obtuvieron las ecuaciones matemticas que rigen el proceso, se
obtuvo el modelado del mismo y procedi a disear el control automtico, el
cual fue del tipo discreto para un tiempo de muestreo de 2000 minutos,
configurndose desde el PLC existente en la planta. Se logr la estabilidad
del sistema por medio de un controlador Proporcional Integral Derivativo
(PID).
Del trabajo mencionado podemos tomar como aportes ms significativos
el estudio de la accin de control y los procedimientos de simulacin en
Simulink para sistemas con tiempos de muestreo altos.
19
Dicha investigacin aporta material de referencia con respecto a las
tcnicas para el diseo de controladores para el manejo de variables
qumicas en diferentes rangos de valores.
Los autores Amaya y otros (2004), presentaron la investigacin titulada
Control de pH para Planta de Tratamiento de Aguas Residuales en la
publicacin N 14 de la revista de investigacin Ciencia e Ingeniera
Neogranadina, trabajo en el cual se desarroll e implement un controlador
clsico PI en un PLC comercial y se automatiza la PTAR mostrando el
resultado obtenido en simulacin en Matlab.
Esta investigacin se encuentra enmarcada en lo documental y consisti
en el diseo de un controlador PI, determinacin de las variables del sistema
y el mtodo de Ziegler - Nichols para la entonacin del controlador, con el
cual se estabiliza el sistema controlando as el mismo.
Esta investigacin aport adems de la informacin referente a la accin
de control PI introduciendo a los conceptos de observabilidad y
controlabilidad muy tiles al momento de analizar controladores PI, PD o PID.
2. Bases Tericas
Para la investigacin a ser desarrollada es necesario consultar una serie
de temas medulares para poder ir dando cumplimiento a los objetivos
20
planteados en el Captulo I, partiendo de la teora que define cada uno de
dichos temas, como se presta a continuacin:
2.1. Proceso de Tratamiento de aguas de produccin para recuperacin
secundaria de crudo.
La inyeccin de agua en los yacimientos de hidrocarburos es muy comn
debido a que es uno de los mtodos ms simple, de menor costo cuando
hablamos de mtodos de recuperacin de hidrocarburo y el factor de recobro
puede llegar a ser del 60% para algunos de los casos.
En principio los pozos de hidrocarburos producen de manera natural
gracias a la energa interna del yacimiento hasta llegar a un punto en el que
la energa presente en el yacimiento es menor a la necesaria para llevar el
crudo hasta la superficie, por lo que es necesario implementar mtodos
secundarios de produccin o recuperacin con el fin de mantener el pozo
produciendo a una taza fija y aumentando el factor de recobro del yacimiento.
El mtodo de recuperacin por bombeo de agua es uno de estos mtodos y
por lo general la inyeccin de agua se realiza por medio de pozos llamados
inyectores que se pueden encontrar en medio de varios pozos productores o
al rededor de ellos con el fin de facilitar el desplazamiento de crudo por el
medio poroso hasta el pozo y posteriormente hasta la superficie o por
inyeccin desde mltiples de inyeccin colocados cercanos al yacimiento
petrolfero para reutilizacin de los volmenes de agua generados por pozos
21
productores con altos cortes de agua de produccin, esto despus de
prepararla para inyeccin en plantas de tratamiento que controlan su pH,
concentracin de crudo y sedimentos y bacterias.
2.2 Descripcin del Proceso de proceso de tratamiento.
En los sistemas de tratamiento de aguas de produccin, proveniente de la
deshidratacin del crudo en las estaciones de flujo, para ser utilizada en
pozos de yacimientos, debe estimarse o reducirse la presencia de slidos en
suspensin (coloides), crudo emulsionado y crudo libre, bacterias sulfo
reductoras, entre otros contaminantes, todo con la finalidad de asegurar la
calidad del agua para inyeccin y garantizar la factibilidad del proceso de
recuperacin secundaria sin afectar las caractersticas del yacimiento.
Entre las tcnicas o procesos de tratamiento de agua para cualquier fin
industrial se encuentre la clarificacin, tcnica altamente difundida para la
remocin de turbiedad, la misma implica la adicin de productos qumicos
denominados coagulantes y floculantes. Estos aditivos provocan que las
partculas se agrupen formando floculos que logran subir a la superficie por la
diferencia de densidades para facilitar la remocin de la materia
contaminante.
22
2.2.1. Clarificacin
La tcnica de clarificacin del agua se divide en tres etapas: coagulacin,
floculacin y sedimentacin.
La coagulacin y la floculacin son unas etapas del proceso que pueden
resumirse como una sola, en la cual las partculas de slidos en suspensin
se aglutinan en pequeas masas denominadas floculos, donde los mismos
con pesos especficos mayores al del agua precipitan y los menores, como
en el caso del crudo, formen una capa en la superficie del clarificador.
La coagulacin se refiere al proceso de desestabilizacin de las partculas
suspendidas de modo que se reduzcan las fuerzas de separacin entre ellas.
El termino coagulo se refiere a las reacciones que suceden al agregar un
activo qumico (coagulante) en agua, originando productos insolubles.
La floculacin tiene relacin con los fenmenos de transporte dentro del
lquido para que las partculas hagan contacto. Esto implica la formacin de
puentes qumicos entre las partculas de modo que se forme una malla de
cogulos, la cual ser tridimensional y porosa, formndose de esta manera
un floc lo suficientemente pesado para sedimentar.
2.3. Sistema de Control.
Los sistemas de control automtico han alcanzado un desarrollo
tecnolgico de grandes proporciones debido a su alta aplicacin en
diferentes procesos industriales a nivel mundial, desde controles de
23
desempeo de maquinas herramientas comunes, hasta robtica aplicada y
tecnologa espacial.
El objetivo principal de un sistema consiste en controlar las salidas del
mismo, por medio de las seales de entrada que atraviesan los elementos
del sistema de control. De forma ms simplificada la variable controlada es la
salida del sistema y la seal de accin es la entrada del mismo.
Un sistema de control es aquel sistema que tiende a mantener una
relacin preestablecida entre la salida y alguna entrada de referencia
comparndolas y utilizando la diferencia como medio de control. Ogata
(1998)
Kuo (1996), define un sistema de control como aquel que permite
controlar las salidas del sistema cuya accin se realiza manipulando la
variable de salida mediante una entrada de referencia y de esta manera se
minimiza el error o desviacin de la salida o resultado del sistema.
Dependiendo de los propsitos industriales requeridos, puede
determinarse el tipo de sistema de control, sea el tipo que se requiera, los
sistemas de control usados en un determinado proceso son un factor
determinante en el funcionamiento optimo, rentable y confiable del mismo.
Tericamente los sistemas de control pueden clasificarse en: Sistemas de
Control de Lazo Abierto y Sistemas de Control de Lazo Cerrado.
24
2.3.1. Sistemas de control de lazo abierto.
Son aquellos sistemas en donde la salida no tiene efecto alguno sobre la
accin de control, es decir, la salida no es medida ni es retroalimentada para
poder ser comparada con la entrada.
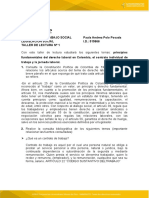
En los sistemas de control de lazo abierto para cada entrada de referencia
corresponde una condicin de operacin, como se muestra en la Figura #1
Figura # 1 Sistema de control de lazo abierto Kuo (1996)
Los sistemas de control de lazo abierto no realizan la tarea deseada ante
la presencia de perturbaciones. En la prctica real, el control a lazo abierto
solo es utilizado si se conoce la relacin entre salidas y entradas y si no
existe ningn tipo de perturbacin interna o externa.
2.3.2. Sistemas de control a lazo cerrado.
En un sistema de control a lazo cerrado o retroalimentado, como suele
denominarse en la prctica, se alimenta al controlador con la seal de error
de actuacin, que no es ms que la diferencia entre la seal de entrada y la
25
seal de realimentacin (que puede ser la seal de salida misma o una
funcin de la seal de salida y sus derivadas o integrales) esto con el
propsito de reducir el error y llevar la salida del sistema al valor deseado. En
la Figura #2 observamos el diagrama esquemtico de un sistema bsico de
control a lazo cerrado.
Figura # 2 Diagrama de un sistema de control a lazo cerrado, Kuo (1996)
2.4. Control Automtico
Los avances modernos en la teora y prctica del control automtico
proporcionan medios para lograr el funcionamiento optimo de sistemas
dinmicos, mejorando la productividad, liberando operaciones manuales
rutinarias, por tanto en base a los criterios de autores como Kuo (1996) y
Ogata (1998) el control automtico juega un papel fundamental en el avance
de las ciencias de la ingeniera.
Dentro del marco del control automtico existen instrumentos capaces de
medir en modo continuo el valor o la condicin de una variable, que actan
automticamente sobre el equipo para corregir el error resultante de la
26
comparacin de la salida del sistema con el valor previamente ajustado,
estos equipos son denominados controladores.
Los controladores automticos al determinar el error entre la salida y el
valor previsto de la entrada, producen una seal de control que reduce dicho
error a cero o a un valor muy pequeo, esta tarea la realiza mediante una
accin de control la cual determina la clasificacin del controlador.
Segn el tipo de accin de control, los controladores estn clasificados de la
siguiente manera:
- Accin de control de dos posiciones (on/off)
- Accin de control Proporcional
- Accin de control Integral
- Accin de control Proporcional Integral
- Accin de control Proporcional Derivativa
- Accin de control Proporcional Integral Derivativa
- Control de Relacin
- Control Discreto
2.4.1. Accin de control de dos posiciones (ON/OFF)
En este sistema de control el elemento de actuacin solo tiene dos
posiciones fijas, que para muchos casos son simplemente encendido y
apagado. Este control es relativamente simple y econmico, por lo cual su
27
uso es extremadamente comn en sistemas de control industrial y
domsticos.
Si la seal de salida del controlador es u(t) y la seal de error es e(t),
entonces, en el control de dos posiciones, la seal u(t) permanece en un
valor ya sea mximo o mnimo, dependiendo de si la seal de error es
positiva o negativa. De manera tal que:
u(t) =u
1
para e(t)>0 (1)
u(t) =u
2
para e(t)<0 (2)
Donde u
1
y u
2
son constantes, por lo general el valor mnimo de u
2
es cero
(0) o u
1
. Es comn que los controladores de dos posiciones sean
dispositivos elctricos, en ese caso es mayormente usada una vlvula
elctrica operada por solenoides. Los controladores neumticos
proporcionales con ganancias muy altas funcionan como controladores de
dos posiciones. En la Figura #3 se muestran los diagramas de bloque para
controladores de dos posiciones.
28
Figura # 3 Diagrama de bloque controlador on/off con brecha y sin brecha diferencial.
Ogata (1998)
El rango en el que debe moverse la seal de error antes de ocurrir la
conmutacin es denominado brecha diferencial.
Para controladores con brecha diferencial, la salida del controlador u(t)
conserva su valor presente, hasta que la seal de error se haya desplazado
ligeramente mas all de cero.
Para algunos casos la brecha diferencial es el resultado de una friccin no
intencionada o de un movimiento perdido, sin embargo, con frecuencia se
provoca de forma intencional para evitar una operacin demasiado frecuente
del mecanismo de encendido y apagado.
2.4.2. Accin de control proporcional
Un controlador proporcional es aquel dispositivo corrector final el cual no
est obligado a tomar una posicin de todo o nada, por el contrario, tiene un
rango continuo de posiciones posibles. La posicin exacta a tomar va a ser
proporcional a la seal de error del sistema de control. En otras palabras la
salida del bloque del controlador es proporcional a su entrada.
29
El valor de la correccin introducida por el controlador es definido por una
banda proporcional, la cual es porcentaje del rango completo del controlador,
que debe cambiar el valor medido del 100% del dispositivo corrector. La
mayora de los controladores proporcionales poseen una banda ajustable,
generalmente variable de un porcentaje algunos cientos.
Para un controlador proporcional, la relacin entre la salida u(t) y la seal
de error e(t) es:
u(t)=K
p
(e(t)) (3)
Al aplicar Transformada de Laplace obtenemos:
u(t)/e(t) =K
p
(4)
Donde K
p
es la ganancia proporcional.
Cualquiera que sea el mecanismo real y la forma de potencia de
operacin, el controlador proporcional es en esencia un amplificador con una
ganancia ajustable. En la Figura #4 se presenta el diagrama de bloque de un
controlador proporcional.
30
Figura # 4 Diagrama de bloque controlador proporcional. Ogata (1998)
2.4.3. Accin de Control Integral
En el controlador que utiliza la accin de control integral, el valor de la
salida del mismo u(t) vara en razn proporcional a la seal de error e(t), es
decir: ) (
) (
t Kt
dt
t du
= o bien
}
=
t
dt t e Kt t u
0
) ( ) (
(5)
Donde Kt es una constante ajustable, entonces la funcin de transferencia
del controlador integral es:
S
Kt
s E
s U
=
) (
) (
(6)
Si se duplica el valor de e(t), el valor de u(t) varia a doble velocidad. Ante
un error igual a cero el valor de u(t) parece estacionario. Es comn nombrar a
la accin de control integral como control de reajuste o reset.
El diagrama de bloque de la accin de control integral se encuentra
representado en la figura #5.
31
Figura # 5 Diagrama de bloque Controlador Integral. Ogata (1998)
2.4.4. Accin de Control Proporcional Integral
La accin de control proporcional integral es la ms adecuada para ser
utilizada en procesos donde los cambios de cargas son grandes y rpidos y
el punto de ajuste varia considerablemente.
Esta accin de control se define de la siguiente manera:
}
+ =
t
dt t e
Ti
Kp
t e Kp t u
0
) ( ) ( . ) (
(7)
Donde la funcin de transferencia del controlador es:
|
.
|
\
|
+ =
Tis
Kp
s E
s U 1
1
) (
) (
(8)
Donde Kp es la ganancia proporcional y Ti se denomina tiempo integral.
Ambos factores son ajustables. El tiempo integral ajusta la accin de control
integral, mientras que un cambio en la ganancia proporcional afecta tanto la
parte integral como proporcional de la accin de control.
32
El inverso del tiempo integral Ti se denomina velocidad de reajuste, la
cual est definida como la cantidad de veces por minuto que se duplica la
parte proporcional de la accin de control. La velocidad de reajuste es
medida en trminos de las repeticiones por minuto. En la Figura #6 se
observa el diagrama de bloque de un controlador proporcional integral con
una entrada escaln.
Figura # 6 Diagrama de bloques controlador PI. Ogata (1998)
2.4.5. Accin de Control Proporcional Derivativa
Esta accin de control est definida por la siguiente ecuacin:
dt
t de
Td Kp t e Kp t u
) (
. ) ( . ) ( + =
(9)
Donde la funcin de transferencia estar definida por:
) 1 (
) (
) (
TdS Kp
S E
s U
=
(10)
33
Kp es la ganancia proporcional y Td es una constante denominada tiempo
derivativo. La accin de control derivativa en ocasiones denominada control
de velocidad, ocurre donde la magnitud de la salida del controlador es
proporcional a la velocidad de cambio de la seal de error.
El tiempo derivativo Td es el intervalo de tiempo durante el cual la accin
de la velocidad hace avanzar el efecto de la accin de control proporcional.
La accin de control derivativa nunca prev una accin que nunca ha
ocurrido. Aunque la accin de control derivativa tiene la ventaja de ser de
previsin y posee la desventaja de que amplifica las seales de ruido, lo que
puede provocar un efecto de saturacin en el actuador.
En la Figura #7 se observa el diagrama de bloque de un controlador
proporcional derivativo, con una entrada funcin rampa unitaria.
Figura # 7 Diagrama de bloque control PD. Ogata (1998).
La accin de control derivativa nunca es usada por s sola, debido a que
solo es eficaz en periodos transitorios.
34
2.4.6. Accin de Control Proporcional Integral Derivativa
La combinacin de un accin de control proporcional, una accin de
control integral y una accin derivativa es empleada, segn Kuo (1996)
debido a que el controlador PD puede aadir amortiguamiento a un sistema,
esto sin afectar la respuesta en estado estable. El controlador PI puede
mejorar la estabilidad relativa y el error en estado estable al mismo tiempo.
La accin de control PID combina las ventajas descritas anteriormente y la
ecuacin del controlador con este tipo de accin de control est determinada
por:
}
+ + =
t
dt
t de
KpTd dt t e
Ti
Kp
t e Kp t u
0
) (
) ( ) ( . ) (
(11)
Obteniendo la funcin de transferencia:
|
.
|
\
|
+ + = Tds
Tis
Kp
s E
s U 1
1
) (
) (
(12)
Donde Kp es la ganancia proporcional, Ti el tiempo integral y Td el tiempo
derivativo.
En la Figura #8 se presenta el diagrama de bloque de la accin de control
PID, para una entrada rampa unitaria.
35
Figura # 8 Diagrama de bloque PID. gata (1998)
2.4.7. Control de Relacin
El objetivo del control de relacin es controlar el flujo o el volumen de una
variable en funcin de otra. Esta tcnica de control, es aplicada por lo general
a dos cantidades de flujo, que deben mantener una relacin prefijada por el
usuario.
Por lo general se tiene una lnea de flujo de un fluido libre y sobre esta se
mide la cantidad de fluido existente en velocidad o volumen, este valor se
enva a un controlador que contiene un factor multiplicador o divisor, cuya
seal acta sobre la vlvula de control de otra lnea con flujo proporcional al
valor censado (flujo controlado).
El flujo libre se llama variable independiente y el flujo controlado se llama
flujo dependiente. Para este tipo de estrategia de control es necesario tomar
las siguientes consideraciones:
- Ambas seales deben tener las mismas unidades.
- Ambas seales deben estar linealizadas en forma cuadrtica.
36
- El rango de los controladores deben ser compatibles con las seales
recibidas de un 0% a un 100%.
- Tomar en cuenta que en la medicin de fluidos la linealidad se pierde
en los extremos de la medicin.
- Las caractersticas de los fluidos deben ser similares.
2.4.8. Control Discreto
Un sistema de control en tiempo discreto es aquel donde una o ms
variables pueden cambiar solo en valores discretos de tiempo.
Estos instantes pueden especificar los tiempos en los que se lleva a cabo
alguna medicin de tipo fsico o los tiempos en los que se extraen los datos
de la muestra de una computadora digital. El intervalo de tiempo entre estos
dos instantes discretos se supone es suficientemente corto de modo que el
dato para el tiempo entre estos se pueda aproximar mediante una
interpolacin simple.
Los sistemas de control en tiempo discreto difieren de los sistemas de
control en tiempo continuo, en que la seal para el tiempo discreto esta en
forma de datos muestreados o de forma digital. Si en el sistema de control
est involucrada una computadora digital como un controlador, los datos
muestreados deben convertirse en datos digitales.
37
2.5. Sintonizacin de un controlador proporcional integral derivativo
(PID)
Segn Ogata (1998) las ecuaciones de Ziegler y Nichols proponen las
pautas para la determinacin de los valores de la ganancia proporcional Kp,
del tiempo integral Ti y del tiempo derivativo Td, con bases en las
caractersticas de respuesta transitoria de una planta especifica.
Tal demostracin de dichos parmetros la realizan los ingenieros de
campo mediante experimentos sobre el proceso mismo a controlar. Dentro
de las reglas de Ziegler Nichols se tiene un caso con el que se pretende
obtener un 25% de sobre paso mximo en la respuesta escaln, en este
caso obteniendo la respuesta a una entrada escaln unitario de manera
experimental si la planta no contiene integradores ni polos dominantes
complejos conjugados, la curva de respuesta escaln unitario puede tener
forma de S. Tales curvas son generadas experimentalmente a travs de una
simulacin de la dinmica de la planta.
La curva de respuesta se caracteriza por dos parmetros, el tiempo de
retardo L y la constante de tiempo T. Estos para metros se obtienen
dibujando una recta tangente en el punto de inflexin de la curva y
determinando las intersecciones de esta recta tangente con el eje del tiempo
C(t) = k. En este caso la funcin de transferencia C(s)/U(s) se aproxima
mediante un sistema de primer orden con un retardo de transporte:
38
1 ) (
) (
1
=
Ts
Ke
t U
t C
s
(13)
Segn Ziegler - Nichols los valores de Kp, Ti y Td pueden calcularse de
acuerdo a la siguiente tabla:
Tabla # 2. Tabla de sincronizacin de Ziegler Nichols, basada en respuesta escaln.
Ogata (1998)
2.6. Controlabilidad y Observabilidad
Se dice que un sistema de control es controlable o de estado controlable,
si y solo si, existe una seal de control constante por intervalos de u(kt)
definidos a lo largo de un nmero finito de periodos de muestreo, de forma
que a partir de cualquier estado inicial Xo(kt) puede ser transferido al estado
deseado Xf en n periodos de muestreo como mximo, esto segn Ogata
(1998).
La matriz de controlabilidad para un sistema definido por:
| | H G H G GH H C
n 1 2
...
= (14)
9 e C (15)
39
El rango de la matriz de controlabilidad es n.
Un sistema de control en tiempo discreto, lineal e invariante con el tiempo,
se dice que es observable, si cualquier estado inicial Xo puede determinarse
a partir de la observacin de y(kt) y sobre un numero finito de periodos de
muestreo.
La matriz de observabilidad para un sistema de tipo:
( ) | |
) ( ) (
) ( 1
kT Cx kT Y
kT Gx T k X
=
= +
(16)
( ) | |
T
n
T T T T
C G C G C O
1
...
= (17)
2.7. Controladores Lgicos Programables (PLC)
El controlador lgico programable naci como solucin al control por
circuito de automatizacin. Por lo tanto se puede decir que un PLC no es
ms que un aparato electrnico que sustituye los circuitos auxiliares o de
mando de los sistemas automticos. A el se conectan captadores (finales de
carrera, pulsadores) por una parte, los actuadores (bobinas de contactores,
lmparas, pequeos receptores) por otra.
Un controlador lgico programable se define como un dispositivo
electrnico operado digitalmente que utiliza la memoria programable para el
almacenamiento interno de instrucciones a fin de implementar funciones
especificas, tales como lgicas, secuenciales, tiempo, conteo y aritmticas, y
40
as de esta manera controlar varios tipos de equipos o maquinas integrantes
de un proceso, a travs de mdulos de entrada y salida analgicos o
digitales.
2.7.1. Aplicaciones de los PLC
El campo de aplicacin de los PLC es muy amplio dentro del mundo de la
automatizacin de procesos, pero es principalmente utilizado en las
siguientes funciones:
- Control de procesos.
- Visualizacin y monitoreo de condiciones de una instalacin.
- Control y puesta a punto de maquinas herramientas.
- Sealizacin y control.
2.7.2. Configuracin de un PLC
De acuerdo a la necesidad tcnica que requiera solucin con un
controlador lgico programable, la configuracin del mismo puede variar a
nivel de su complejidad, independientemente de este factor los elementos
esenciales del PLC son los descritos a continuacin:
- Hardware: Por hardware se entienden los grupos electrnicos. Estos
se encargan de activar o desactivar las funciones controlables de la
instalacin o maquinaria en funcin de una secuencia lgica
41
determinada. La parte esencial del hardware del PLC es la unidad
central de proceso o CPU, por su construccin la CPU es casi idntica
a un ordenador, su actividad interna se califica de procesador, los
datos que procesa y analiza la CPU son seales binarias. Estas se
componen respectivamente casi siempre de un bit estado cero
(inactivo) o estado 1 (activo).
- Software: Son los programas que determinan los enlaces lgicos, es
decir, el mando de los grupos controlables en la instalacin o
maquinaria. Los programas del PLC son elaborados partiendo de
programas o cdigos fuente, que el operario programador puede
confeccionar de tres formas diferentes: (a) En forma de listado
programa de instrucciones (AWL), (b) En forma de diagrama de
contactos (KOP) y (c) En forma de diagrama de funciones (FUP).
- Sensores: Son transmisores de seales. El PLC utiliza los sensores
para consultar estados en la instalacin o en los equipos controlables.
El PLC trabaja con electricidad, por ello las seales no elctricas
tienen que ser convertidas por los sensores, de lo contrario, el modulo
de entradas no podr interpretarlas. Los elementos sensores podrn
ser conmutadores o detectores de proximidad.
- Actuadores: Son elementos ejecutores, estos toman las seales
binarias de los mdulos de salida y las amplifican para seales de
conmutacin o las convierten en seales para otras formas de
energa. Se distinguen actuadores elctricos, electro hidrulicos,
42
electro neumticos, los elementos actuadores tambin pueden ser
zumbadores o electrovlvulas.
- Equipo programador: Se utiliza para introducir o editar los programas,
para traducirlos al cdigo PLC, para implementarlos en el PLC y para
comprobarlos. Los equipos especiales de programacin permiten
normalmente la programacin con smbolos especficos y propios para
la correspondiente tarea de control, los smbolos indicados se basan
en la norma DIN 19239.
3. Sistema de Variables de la Investigacin.
Las variables de estudio de esta investigacin son las siguientes:
- Sistemas de Control Automtico para inyeccin de qumica.
3.1. Sistema de Control Automtico para inyeccin de qumica.
Definicin Conceptual: Segn Kuo (1986), un sistema de control
automtico se refiere a la amplia variedad de elementos, sistemas o
procedimientos que operan con poca o ninguna intervencin humana. Un
sistema de control automtico ajusta su operacin en respuesta a los
cambios de las condiciones externas en tres pasos: medir, evaluar y
controlar.
Trasladando el concepto definido anteriormente en funcin de un Sistema
de Control pero enfocado a la Inyeccin de Qumica, se puede hablar de que
43
el mismo integra las funcionalidades bsicas y fundamentales para el control
optimizado de la inyeccin de una sustancia qumica a un caudal de fluido
dentro de un proceso de produccin. Dichos sistemas permiten la inyeccin
de qumicos en funcin de mediciones de otras variables, mediante un
control automtico del lazo de flujo o en su defecto un sistema alterno de
dosificacin en lazo abierto, permitiendo la medicin en lnea de las
variables.
Definicin Operacional: El sistema de control automtico para inyeccin
de qumica es aquel que solo necesita una calibracin inicial para ser capaz
de mantener la concentracin de crudo en agua de la Planta de Tratamiento
dentro del valor permisible en el proceso automticamente, utilizando una
gran variedad de dispositivos encargados de censar los cambios, como los
sensores de crudo en agua, bombas de inyeccin, todos estos con entradas
analgicas de 0 a 20 mA, dichos dispositivos estructurados de manera que
sea posible obtener las condiciones para evaluar el error entre el valor
medido contra el valor deseado para realizar el ajuste necesario. La variable
manipulada en este caso es el sistema de control automtico para la
inyeccin de qumica clarificante, ya que es el encargado de regular la
cantidad y la frecuencia de inyeccin del aditivo qumico conocido como
clarificante a los depsitos de agua de produccin, para lo que se realiza el
modelado de dicho proceso para la obtencin del modelo matemtico de
44
mayor aproximacin en porcentaje, al mismo tiempo esta variable es
segregada en la medicin de otra variable por medio de un sensor de crudo
en agua en cual mide en partculas por milln (ppm).
La eficiencia del sistema de control es medida en funcin de la cantidad
de agua tratada diariamente, el nivel de los tanques de qumica de cada
punto de inyeccin y el control de inyeccin de aditivos qumicos
(clarificante).
4. Cuadro de referencias bibliogrficas.
A continuacin en la Tabla #3 se presenta el desarrollo de las referencias
bibliogrficas de la investigacin.
45
Objetivo General: Proponer un sistema de control automtico para la inyeccin de qumica clarificante con el fin de optimizar el proceso de tratamiento de aguas efluentes de
produccin de crudo en la Planta de Tratamiento de Aguas de Produccin del Patio de Tanques Lagunillas Norte.
OBJS. ESPECIFICOS VARIABLE AREA SUB-AREA
Determinar el esquema de operacin actual de la planta de tratamiento
de agua con condiciones reales de funcionamiento.
Sistema de Control
Automtico para
Inyeccin de Qumica
Clarificante
Proceso de Tratamiento de Aguas
Efluentes de Produccin.
Volumen de agua (BNPD)
Crudo en agua (ppm)
Identificar las variables que intervienen en el proceso de inyeccin de
qumica clarificante en la planta de tratamiento del patio de tanques
Lagunillas Norte.
Entradas y salidas del sistema de
inyeccin de qumica clarificante.
Seal de entrada de la bomba
inyectora (mA)
Cantidad de qumica a inyectar (L)
Obtener el modelo matemtico del proceso de inyeccin de qumica
clarificante para el tratamiento de agua para inyeccin, mediante la
identificacin de sistemas generada por los datos recolectados en sitio.
Modelo Matemtico del Sistema de
Inyeccin.
Datos de entrada y salida del
proceso (mA, L, ppm)
Aproximacin del modelo (%)
Evaluar el sistema de control automtico Proporcional Integral Derivativo
(PID) para el proceso de inyeccin objeto del modelado del sistema.
Estrategias de Control a Utilizar.
Acciones de control.
Control Discreto.
Control de Relacin.
Simular el sistema de control automtico PID para la inyeccin de
qumica en la herramienta Simulink de Matlab.
Simulacin de parmetros del
controlador.
Constantes de Proporcionalidad,
Interaccin y derivativa (Kp, Ki y Kd).
Seales de perturbacin.
Proporcionar la programacin del Controlador Lgico Programable de la
planta con las caractersticas del sistema de control seleccionado.
Programacin del Controlador Lgico
Programable.
Forma de funciones (AWL)
Diagrama de Contactos (KOP).
Funciones (FUP).
Tabla # 3. Cuadro de referencias bibliogrficas. Fuente: Rincn, 2013
Potrebbero piacerti anche
- ANEXO 1 Area ContractualDocumento8 pagineANEXO 1 Area ContractualKenny de CornielesNessuna valutazione finora
- Campo ChichimeneDocumento21 pagineCampo ChichimeneKenny de CornielesNessuna valutazione finora
- Inyeccion de Agua Chichimene T2Documento56 pagineInyeccion de Agua Chichimene T2Kenny de CornielesNessuna valutazione finora
- PPR Es CSG M Esp B 013 Rev 0 Espec. Lanzador de ChanchoDocumento7 paginePPR Es CSG M Esp B 013 Rev 0 Espec. Lanzador de ChanchoKenny de CornielesNessuna valutazione finora
- Anexo 3.3 Especificaciones Tecnicas 1244 62-01-00-MS-1500-01 0 PDFDocumento22 pagineAnexo 3.3 Especificaciones Tecnicas 1244 62-01-00-MS-1500-01 0 PDFKenny de CornielesNessuna valutazione finora
- Documentacion y Proceso de Visado EcuadorDocumento6 pagineDocumentacion y Proceso de Visado Ecuadorcarlucho2584Nessuna valutazione finora
- 1sec 2b Uno Se CC MatemticasDocumento64 pagine1sec 2b Uno Se CC MatemticasKenny de CornielesNessuna valutazione finora
- International Snubbing Services Brochure EsDocumento10 pagineInternational Snubbing Services Brochure EsKenny de CornielesNessuna valutazione finora
- Caso GoogleDocumento7 pagineCaso GoogleHeberth C. RodriguezNessuna valutazione finora
- Problemas Estatica07Documento19 pagineProblemas Estatica077ordanNessuna valutazione finora
- Exa-2-Nov 28Documento6 pagineExa-2-Nov 28Maria Sanabria MurNessuna valutazione finora
- CPC - 2AC - Servicios - Sec 5 - 9Documento47 pagineCPC - 2AC - Servicios - Sec 5 - 9Angie S. CastellanosNessuna valutazione finora
- E-Cm-042 Determinación de Terrones de Arcilla y Partículas Deleznables en Los AgregadosDocumento3 pagineE-Cm-042 Determinación de Terrones de Arcilla y Partículas Deleznables en Los AgregadosKrolina VillaBel100% (1)
- Método de Rigidez Directa (Paso A Paso)Documento11 pagineMétodo de Rigidez Directa (Paso A Paso)AlonsoGarcesNessuna valutazione finora
- Estamos, Pero Raúl Abreu Martín-2019Documento162 pagineEstamos, Pero Raúl Abreu Martín-2019Cubaperiodistas100% (1)
- Memoria DescriptivaDocumento4 pagineMemoria DescriptivaFanny NavarroNessuna valutazione finora
- Fechas Ex-DividendoDocumento81 pagineFechas Ex-DividendoAlejandroNessuna valutazione finora
- Energia Libre PDFDocumento90 pagineEnergia Libre PDFmadeheis100% (2)
- Ciclo Termodinamico de Las Turbinas de GasDocumento33 pagineCiclo Termodinamico de Las Turbinas de GasMiguel Lennon0% (1)
- Contenido Curso Trabajo en Altura PDFDocumento2 pagineContenido Curso Trabajo en Altura PDFZambrano ArteagaNessuna valutazione finora
- Matriz de Auditoria AmbientalDocumento8 pagineMatriz de Auditoria AmbientalAlexandra Serrano.vargasNessuna valutazione finora
- Procedimiento Contra El Hostigamiento SexualDocumento5 pagineProcedimiento Contra El Hostigamiento SexualKatty VelásquezNessuna valutazione finora
- Liquidacion Contrato Jhon Erick Ospina VelezDocumento2 pagineLiquidacion Contrato Jhon Erick Ospina VelezSebas AlmonacidNessuna valutazione finora
- Taller 1Documento5 pagineTaller 1Paula Andrea Polo PosadaNessuna valutazione finora
- Libro en Espanol - Jaime - Leonardo - Calapuja - Sinchi - Peru - 0Documento21 pagineLibro en Espanol - Jaime - Leonardo - Calapuja - Sinchi - Peru - 0Gamaniel Chavez L.Nessuna valutazione finora
- Externalidades y Bienes PúblicosDocumento18 pagineExternalidades y Bienes PúblicosdavidNessuna valutazione finora
- Volare PatataDocumento3 pagineVolare PatataRobirotensNessuna valutazione finora
- Pronóstico Hidrológico Senamhi Miércoles 07-12-2022Documento39 paginePronóstico Hidrológico Senamhi Miércoles 07-12-2022pabloNessuna valutazione finora
- Hoja de Vida Luisa Sarmiento BDocumento10 pagineHoja de Vida Luisa Sarmiento Bkorsun46Nessuna valutazione finora
- OpenShift UsoDocumento28 pagineOpenShift Usocesar.econocomNessuna valutazione finora
- Universidad Veracruzana Universidad Veracruzana: Dr. Juan Campos Rivera Dr. Juan Campos RiveraDocumento3 pagineUniversidad Veracruzana Universidad Veracruzana: Dr. Juan Campos Rivera Dr. Juan Campos Rivera125 hkNessuna valutazione finora
- TEMA04 - Manufactura Termoplasticos y Termoestables PDFDocumento36 pagineTEMA04 - Manufactura Termoplasticos y Termoestables PDFjus100% (1)
- Boletín Oficial 96Documento75 pagineBoletín Oficial 96Pilar de Todos100% (1)
- Funciones Del OperadorDocumento2 pagineFunciones Del OperadorAlvaro ChicaizaNessuna valutazione finora
- Manual de Procedimientos Tasadores TINSADocumento74 pagineManual de Procedimientos Tasadores TINSAAlexisParraNessuna valutazione finora
- Etapas de Un Proyecto Minero Parte 1Documento10 pagineEtapas de Un Proyecto Minero Parte 1henry2070% (1)
- Estructura de Un AutomatismoDocumento19 pagineEstructura de Un AutomatismoVicente SolisNessuna valutazione finora
- Convocatoria CopasstDocumento12 pagineConvocatoria CopasstDario Gonzalez PeñalverNessuna valutazione finora