Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- How To Failover and Flashback A Physical Standby 2Documento4 pagineHow To Failover and Flashback A Physical Standby 2baraka08Nessuna valutazione finora
- Mercury Outboard Motor Installation GuideDocumento20 pagineMercury Outboard Motor Installation GuideMick Bissett100% (3)
- 26.multiconverter Unified PowerDocumento84 pagine26.multiconverter Unified PowermygodspNessuna valutazione finora
- Cell CountingDocumento5 pagineCell CountingmygodspNessuna valutazione finora
- Eschatology IIIDocumento151 pagineEschatology IIImygodspNessuna valutazione finora
- Automatic Reconfiguration For Large-Scale Reliable Storage SystemsDocumento13 pagineAutomatic Reconfiguration For Large-Scale Reliable Storage SystemsmygodspNessuna valutazione finora
- Erudite: !!! FREE Courses!!!Documento2 pagineErudite: !!! FREE Courses!!!mygodspNessuna valutazione finora
- Finger Print Based Atm Authentication andDocumento4 pagineFinger Print Based Atm Authentication andmygodspNessuna valutazione finora
- Finger Print Atm SecurityDocumento24 pagineFinger Print Atm SecuritymygodspNessuna valutazione finora
- Final Erudite ProfileDocumento3 pagineFinal Erudite ProfilemygodspNessuna valutazione finora
- EmbdDocumento42 pagineEmbdmygodspNessuna valutazione finora
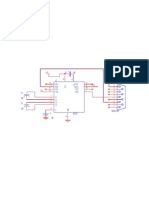
- RXD TXD: R1In R2In T1In T2In C+ C1-C2+ C2 - V - R1Out R2Out T1Out T2OutDocumento1 paginaRXD TXD: R1In R2In T1In T2In C+ C1-C2+ C2 - V - R1Out R2Out T1Out T2OutmygodspNessuna valutazione finora
- J3 Con8: CH0 LCD - D2 CH2 LCD - D0 CH1 LCD - D1 CH3Documento1 paginaJ3 Con8: CH0 LCD - D2 CH2 LCD - D0 CH1 LCD - D1 CH3mygodspNessuna valutazione finora
- Active Rectifier and ZCDDocumento1 paginaActive Rectifier and ZCDmygodspNessuna valutazione finora
- Electix WorkshopDocumento5 pagineElectix WorkshopmygodspNessuna valutazione finora
- Computer ChipDocumento1 paginaComputer ChipmygodspNessuna valutazione finora
- Manual de Usuario de PLC XGT SeriesDocumento97 pagineManual de Usuario de PLC XGT SeriesMarios ClubsNessuna valutazione finora
- Bus (Computing) - Wikipedia, The Free EncyclopediaDocumento6 pagineBus (Computing) - Wikipedia, The Free EncyclopediaManitNessuna valutazione finora
- ProjectDocumento106 pagineProjectnesemohankumarNessuna valutazione finora
- User Manual IPS-2042PDocumento44 pagineUser Manual IPS-2042Poring2012Nessuna valutazione finora
- Power Electronics NotesDocumento91 paginePower Electronics NotesTaimur Musharraf89% (46)
- MS309 Manual - V1.01 PDFDocumento32 pagineMS309 Manual - V1.01 PDFtidchong prakoonmongkoneNessuna valutazione finora
- RN4870 71 Bluetooth Low Energy Module User Guide DS50002466CDocumento75 pagineRN4870 71 Bluetooth Low Energy Module User Guide DS50002466CDev SaneNessuna valutazione finora
- TrheeDocumento3 pagineTrheearrofiqNessuna valutazione finora
- EC1451 NotesDocumento149 pagineEC1451 Notesanon_571346676Nessuna valutazione finora
- Timing PathsDocumento44 pagineTiming PathsMohammed El-Adawy100% (2)
- ACER Aspire 7736 GM45 JV71-MV - DDR3Documento62 pagineACER Aspire 7736 GM45 JV71-MV - DDR3miecho1985Nessuna valutazione finora
- Operating Manual-Sx60-100 Om 090824Documento112 pagineOperating Manual-Sx60-100 Om 090824calinut1975Nessuna valutazione finora
- Data Sheet 2 SK 3878Documento6 pagineData Sheet 2 SK 3878Pepe PecasNessuna valutazione finora
- NSA325 - V4.70 Ed3Documento384 pagineNSA325 - V4.70 Ed3gimli77Nessuna valutazione finora
- Unix ProgramsDocumento20 pagineUnix ProgramsSupriya KakaraddiNessuna valutazione finora
- Ovirt and Gluster Hyper-Converged!: Ha Solution For Maximum Resource UtilizationDocumento30 pagineOvirt and Gluster Hyper-Converged!: Ha Solution For Maximum Resource UtilizationFernando Ferrer GarciaNessuna valutazione finora
- Context Free GrammarsDocumento55 pagineContext Free Grammarsjun71178Nessuna valutazione finora
- Service Manual SM17 - 002 - 083.00: Latching Boom Mechanism RetrofitDocumento24 pagineService Manual SM17 - 002 - 083.00: Latching Boom Mechanism RetrofitErissonNessuna valutazione finora
- How To - Fault Find On Can BusDocumento13 pagineHow To - Fault Find On Can BusIvan PalominoNessuna valutazione finora
- Samsung Eletornics Logic and I/O Products SPC-10/N70Plus/N70/700Plus Series Application NoteDocumento12 pagineSamsung Eletornics Logic and I/O Products SPC-10/N70Plus/N70/700Plus Series Application NoterticonaNessuna valutazione finora
- Liberty File IntroductionDocumento8 pagineLiberty File IntroductioncatchakhilNessuna valutazione finora
- Sony KDL S40a12u KLV S40a10eDocumento106 pagineSony KDL S40a12u KLV S40a10eSaeid ElahiNessuna valutazione finora
- Honeywell Ky 97a PDFDocumento237 pagineHoneywell Ky 97a PDFJEFFREY DEE MAURY NORIEGANessuna valutazione finora
- Google ChoromDocumento4 pagineGoogle ChoromMushfikur Rahman SaadNessuna valutazione finora
- Loops, File, and Random NumbersDocumento32 pagineLoops, File, and Random NumbersWeeHong NgeoNessuna valutazione finora
- Q250 SM Pneumatic Spinning WrenchDocumento11 pagineQ250 SM Pneumatic Spinning WrenchGianna FrolaNessuna valutazione finora
- Final DAA Lab ManualDocumento38 pagineFinal DAA Lab ManualGina BarreraNessuna valutazione finora
- MFD 3 00 340 Installation Guide Part II PDFDocumento458 pagineMFD 3 00 340 Installation Guide Part II PDFМилен ДолапчиевNessuna valutazione finora