Potrebbero piacerti anche
- Logical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeDa EverandLogical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeNessuna valutazione finora
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Da EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Nessuna valutazione finora
- Conservation of Mechanical Energy, Linear MomentumDocumento6 pagineConservation of Mechanical Energy, Linear MomentumDaniel LiawNessuna valutazione finora
- HD 7 Modal Analysis Undamped MDOFDocumento45 pagineHD 7 Modal Analysis Undamped MDOFa_oucharNessuna valutazione finora
- Chapter 1Documento8 pagineChapter 1hitesh89Nessuna valutazione finora
- HD 6 Numerical Integration of SDOF 2008Documento17 pagineHD 6 Numerical Integration of SDOF 2008concord1103Nessuna valutazione finora
- Question BankDocumento8 pagineQuestion Bankpriyakanthr5883Nessuna valutazione finora
- Handout M.4 - Solutions of Ordinary Differential Equations: F T KX T X C T X MDocumento15 pagineHandout M.4 - Solutions of Ordinary Differential Equations: F T KX T X C T X MTushar DeshpandeNessuna valutazione finora
- One Degree of Freedom, Harmonically Excited Vibrations: Forced Harmonic VibrationDocumento15 pagineOne Degree of Freedom, Harmonically Excited Vibrations: Forced Harmonic VibrationUmair Mirza100% (1)
- International Conference NeruDocumento10 pagineInternational Conference NeruNeeru SinghNessuna valutazione finora
- Nbody DissipativeDocumento44 pagineNbody DissipativeFulana SchlemihlNessuna valutazione finora
- STRC201 Sdof JMWBDocumento99 pagineSTRC201 Sdof JMWBJura PateregaNessuna valutazione finora
- Pre PrintDocumento30 paginePre Printgorot1Nessuna valutazione finora
- FDTD (Intro)Documento169 pagineFDTD (Intro)Nameeza SultanNessuna valutazione finora
- Applications of Finite Element Method To Scalar Transport ProblemsDocumento5 pagineApplications of Finite Element Method To Scalar Transport ProblemsSaumya SinhaNessuna valutazione finora
- 3 SLAjitprasadDocumento17 pagine3 SLAjitprasadJaya JvNessuna valutazione finora
- Chapter 16Documento43 pagineChapter 16German ToledoNessuna valutazione finora
- A New Predictor-Corrector Method For Optimal Power FlowDocumento5 pagineA New Predictor-Corrector Method For Optimal Power FlowfpttmmNessuna valutazione finora
- Wavelets 3Documento29 pagineWavelets 3ac.diogo487Nessuna valutazione finora
- Control System IDocumento95 pagineControl System I34plt34Nessuna valutazione finora
- Vibration MechanicsDocumento19 pagineVibration MechanicsHari Tej AvvaruNessuna valutazione finora
- Quadratic EquationDocumento9 pagineQuadratic EquationnhanpharNessuna valutazione finora
- HD 13 Numerical Integration of MDOF 2008Documento18 pagineHD 13 Numerical Integration of MDOF 2008tanha56313955Nessuna valutazione finora
- Control System II - Lecture NotesDocumento78 pagineControl System II - Lecture Notes34plt34Nessuna valutazione finora
- Systems, Structure and ControlDocumento188 pagineSystems, Structure and ControlYudo Heru PribadiNessuna valutazione finora
- Output-Feedback Stabilization of Stochastic Nonlinear Systems Driven by Noise of Unknown CovarianceDocumento10 pagineOutput-Feedback Stabilization of Stochastic Nonlinear Systems Driven by Noise of Unknown CovarianceEva KaslikNessuna valutazione finora
- State Space Representation Part-1Documento47 pagineState Space Representation Part-1SingappuliNessuna valutazione finora
- Module 02C Difference EquationDocumento7 pagineModule 02C Difference EquationTy SmithNessuna valutazione finora
- Ec6303 - Ss QB (Part - A & B) 2Documento10 pagineEc6303 - Ss QB (Part - A & B) 2Maheshwaran MahiNessuna valutazione finora
- Matlab ExamDocumento4 pagineMatlab ExamSawan Singh MaharaNessuna valutazione finora
- Theory For Two Degree of Freedom SystemsDocumento4 pagineTheory For Two Degree of Freedom SystemsRajiv ThambotheranNessuna valutazione finora
- A Mathematical Approach of Fractional-Order Systems: Costandin Marius-SimionDocumento4 pagineA Mathematical Approach of Fractional-Order Systems: Costandin Marius-SimionMOKANSNessuna valutazione finora
- Finite-Difference Time-Domain MethodDocumento168 pagineFinite-Difference Time-Domain MethodCharif MohamedNessuna valutazione finora
- Paper 23-A New Type Method For The Structured Variational Inequalities ProblemDocumento4 paginePaper 23-A New Type Method For The Structured Variational Inequalities ProblemEditor IJACSANessuna valutazione finora
- Elementary Tutorial: Fundamentals of Linear VibrationsDocumento51 pagineElementary Tutorial: Fundamentals of Linear VibrationsfujinyuanNessuna valutazione finora
- Problem 11.1: (A) : F (Z) Z X (Z) F (Z) F Z + ZDocumento9 pagineProblem 11.1: (A) : F (Z) Z X (Z) F (Z) F Z + Zde8737Nessuna valutazione finora
- Stability in The Models of Real World Phenomena: A.A. MartunyukDocumento46 pagineStability in The Models of Real World Phenomena: A.A. Martunyukada sdgsdNessuna valutazione finora
- Vibration Under General Forcing ConditionsDocumento48 pagineVibration Under General Forcing ConditionsEpimerianos AberianosNessuna valutazione finora
- Fault Detection Based On Observer For Nonlinear Dynamic Power SystemDocumento8 pagineFault Detection Based On Observer For Nonlinear Dynamic Power SystemAbdulazeez Ayomide AdebimpeNessuna valutazione finora
- InTech-Control Designs For Linear Systems Using State Derivative FeedbackDocumento29 pagineInTech-Control Designs For Linear Systems Using State Derivative FeedbackManmatha KrishnanNessuna valutazione finora
- Flatness and Motion Planning: The Car With: N TrailersDocumento6 pagineFlatness and Motion Planning: The Car With: N TrailersgeneralgrievousNessuna valutazione finora
- DSP Question Bank 8-10-15Documento14 pagineDSP Question Bank 8-10-15raghav dhamaniNessuna valutazione finora
- ENGM541 Lab5 Runge Kutta SimulinkstatespaceDocumento5 pagineENGM541 Lab5 Runge Kutta SimulinkstatespaceAbiodun GbengaNessuna valutazione finora
- Modal AnalysisDocumento40 pagineModal AnalysisSumit Thakur100% (1)
- 2009 2 Art 04Documento8 pagine2009 2 Art 04Raja RamNessuna valutazione finora
- Vibration of Single Degree of Freedom SystemDocumento31 pagineVibration of Single Degree of Freedom SystemEnriqueGDNessuna valutazione finora
- DSP-Lec 2Documento28 pagineDSP-Lec 2ngmaherNessuna valutazione finora
- Exam 2:: All AllDocumento12 pagineExam 2:: All AllUsama FaisalNessuna valutazione finora
- Classnotes For Classical Control Theory: I. E. K Ose Dept. of Mechanical Engineering Bo Gazici UniversityDocumento51 pagineClassnotes For Classical Control Theory: I. E. K Ose Dept. of Mechanical Engineering Bo Gazici UniversityGürkan YamanNessuna valutazione finora
- Control Systems EngineeringDocumento32 pagineControl Systems EngineeringSingappuli100% (2)
- Assignment 1 - Sig and SysDocumento2 pagineAssignment 1 - Sig and SysHarsh KaushalyaNessuna valutazione finora
- Paper Review On Con Troll AbilityDocumento7 paginePaper Review On Con Troll AbilityHoang TranNessuna valutazione finora
- Sdof DynDocumento29 pagineSdof DynAnkur KurmiNessuna valutazione finora
- 316s Answer10 PDFDocumento3 pagine316s Answer10 PDFjisteeleNessuna valutazione finora
- Chapter 2 - Mathematical ModellingDocumento84 pagineChapter 2 - Mathematical ModellingDyrul SyaznanNessuna valutazione finora
- Filtering and Identification: Lecture 3: Stochastic Least Squares Square Root EstimationDocumento45 pagineFiltering and Identification: Lecture 3: Stochastic Least Squares Square Root Estimationaapbanaan2Nessuna valutazione finora
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)Da EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)Nessuna valutazione finora
- Elementary Differential Equations with Linear AlgebraDa EverandElementary Differential Equations with Linear AlgebraNessuna valutazione finora
- More About Plastics: (Continued On Following Page)Documento3 pagineMore About Plastics: (Continued On Following Page)Daniel LiawNessuna valutazione finora
- More About Plastics: (Continued On Following Page)Documento3 pagineMore About Plastics: (Continued On Following Page)Daniel LiawNessuna valutazione finora
- Physics 2016 Curriculum Data BookletDocumento15 paginePhysics 2016 Curriculum Data Bookletrayban262Nessuna valutazione finora
- More About Plastics: (Continued On Following Page)Documento3 pagineMore About Plastics: (Continued On Following Page)Daniel LiawNessuna valutazione finora
- Blessings of The Cross PDFDocumento48 pagineBlessings of The Cross PDFZwesty Rimba100% (2)
- Chemical Resistance Guide CPVCDocumento22 pagineChemical Resistance Guide CPVCEsteban David Mena AriasNessuna valutazione finora
- Delrin AFDocumento2 pagineDelrin AFDaniel LiawNessuna valutazione finora
- Smoothly Does It: Case StudyDocumento2 pagineSmoothly Does It: Case StudyDaniel LiawNessuna valutazione finora
- Temperature MeasurementDocumento7 pagineTemperature MeasurementDaniel LiawNessuna valutazione finora
- FlawlessDocumento1 paginaFlawlessDaniel LiawNessuna valutazione finora
- Test Plan and CalibrationDocumento8 pagineTest Plan and CalibrationDaniel LiawNessuna valutazione finora
- Smoothly Does It: Case StudyDocumento2 pagineSmoothly Does It: Case StudyDaniel LiawNessuna valutazione finora
- Instrumentation ElectronicsDocumento8 pagineInstrumentation ElectronicsDaniel LiawNessuna valutazione finora
- Strain ForceDocumento6 pagineStrain ForceDaniel LiawNessuna valutazione finora
- Digital Signals and DAQDocumento12 pagineDigital Signals and DAQDaniel LiawNessuna valutazione finora
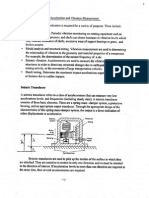
- Acceleration and VibrationDocumento6 pagineAcceleration and VibrationDaniel LiawNessuna valutazione finora
- Iso 281:2007Documento6 pagineIso 281:2007Daniel LiawNessuna valutazione finora
- Displacement and Velocity MeasurementDocumento8 pagineDisplacement and Velocity MeasurementDaniel LiawNessuna valutazione finora
- AppendixF USES of FRF 2012Documento13 pagineAppendixF USES of FRF 2012ettypasewangNessuna valutazione finora
- Appendix D 2008Documento14 pagineAppendix D 2008Daniel LiawNessuna valutazione finora
- AppendixB 2013Documento3 pagineAppendixB 2013Daniel LiawNessuna valutazione finora
- Passion Digital BookletDocumento10 paginePassion Digital BookletDaniel LiawNessuna valutazione finora
- Passion Digital BookletDocumento10 paginePassion Digital BookletDaniel LiawNessuna valutazione finora
- Mech Compared To EngphysDocumento4 pagineMech Compared To EngphysDaniel LiawNessuna valutazione finora
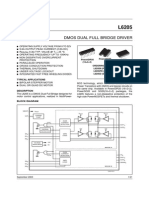
- L6205 Data SheetDocumento21 pagineL6205 Data SheetDaniel LiawNessuna valutazione finora
- SkyTrain SysDocumento1 paginaSkyTrain SysSara NiuNessuna valutazione finora
- Aksa Avp350Documento4 pagineAksa Avp350MarcosNessuna valutazione finora
- Calculus Variations NOTES1Documento107 pagineCalculus Variations NOTES1vc94Nessuna valutazione finora
- KM 2550 PL Rev0aDocumento49 pagineKM 2550 PL Rev0aAdrian AraujoNessuna valutazione finora
- Industrial AutomationDocumento2 pagineIndustrial Automationsarath kcNessuna valutazione finora
- Compressor Design PDFDocumento7 pagineCompressor Design PDFwaheedNessuna valutazione finora
- Sewing Machine Maintenance: Guide C-102Documento8 pagineSewing Machine Maintenance: Guide C-102pandoll100% (1)
- FD 1Documento38 pagineFD 1DrSuman ManandharNessuna valutazione finora
- Camisas Refrigeracion Flowsleeves Pi-058 GB 2013-06-12Documento38 pagineCamisas Refrigeracion Flowsleeves Pi-058 GB 2013-06-12daniel2rialNessuna valutazione finora
- Obd VNL VolvoDocumento23 pagineObd VNL Volvosalvatore702100% (2)
- Conectores Rele Arranque Aveo 2005Documento3 pagineConectores Rele Arranque Aveo 2005Jose Luis Velasquez RomeroNessuna valutazione finora
- 50BYBL ManualDocumento24 pagine50BYBL ManualNguyễn HùngNessuna valutazione finora
- Servicemanual PanasonicDocumento62 pagineServicemanual PanasonicYsabelle Tagaruma100% (1)
- JIS - Valve StandardsDocumento10 pagineJIS - Valve StandardsPrateek GuptaNessuna valutazione finora
- 2 Speed Propulsion System Scana PropulsionDocumento4 pagine2 Speed Propulsion System Scana PropulsionMaurizio BernasconiNessuna valutazione finora
- Ifi 115Documento1 paginaIfi 115Vinay PawarNessuna valutazione finora
- Gears: Pinion Gear, Step Down DriveDocumento42 pagineGears: Pinion Gear, Step Down DriveIshan VermaNessuna valutazione finora
- DanfossDocumento76 pagineDanfossneerajlokhande05Nessuna valutazione finora
- Haulm Cutter: Solves Problems Before Mechanical Harvesting!Documento6 pagineHaulm Cutter: Solves Problems Before Mechanical Harvesting!FabianoNessuna valutazione finora
- Single Composite Beam With Deck Slab Design - ISMBDocumento94 pagineSingle Composite Beam With Deck Slab Design - ISMBHAZIRACFS SURAT100% (1)
- Churro MakerDocumento6 pagineChurro MakerAbad Ebander Daza VelásquezNessuna valutazione finora
- Gulf Gear WT: High Performance Industrial Gear OilDocumento1 paginaGulf Gear WT: High Performance Industrial Gear Oilatripathi2009Nessuna valutazione finora
- Mechanics Prob 2Documento3 pagineMechanics Prob 2Paul Angelou CiriacoNessuna valutazione finora
- HMC S Eng V6Documento104 pagineHMC S Eng V6mohammed100% (1)
- Problem Sheet 1Documento3 pagineProblem Sheet 1Hania FarhanNessuna valutazione finora
- Chapter 9 - Motion Along A Straight LinesDocumento5 pagineChapter 9 - Motion Along A Straight Linesahmadkamil9286% (7)
- Pipes b16.25 PDFDocumento11 paginePipes b16.25 PDFAsep DarojatNessuna valutazione finora
- Design Report FinalDocumento68 pagineDesign Report FinalAsiri MihiranNessuna valutazione finora
- VR Lubricator ToolDocumento2 pagineVR Lubricator ToolChrisNessuna valutazione finora
- Repair Parts Sheet Turbo II Air Pumps: L2533 Rev. O 04/01 For Date Codes Beginning With The Letter "O"Documento12 pagineRepair Parts Sheet Turbo II Air Pumps: L2533 Rev. O 04/01 For Date Codes Beginning With The Letter "O"Roberto RodriguezNessuna valutazione finora
- Butt Heat Fusion Polyethylene (PE) Plastic Fittings For Polyethylene (PE) Plastic Pipe and TubingDocumento8 pagineButt Heat Fusion Polyethylene (PE) Plastic Fittings For Polyethylene (PE) Plastic Pipe and Tubingastewayb_964354182Nessuna valutazione finora