Potrebbero piacerti anche
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Glycemic Index Foundation GI PregnancyDocumento2 pagineGlycemic Index Foundation GI PregnancyAnonymous D1h2pKNessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Water and Environment EngineeringDocumento5 pagineWater and Environment EngineeringAnonymous D1h2pKNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Basis of Design 25000 ReservoirDocumento3 pagineBasis of Design 25000 ReservoirAnonymous D1h2pKNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- PT IntroductionDocumento35 paginePT IntroductionAnonymous D1h2pKNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Tensile Stress - 0.2mm Crack Width - G35 & G40Documento1 paginaTensile Stress - 0.2mm Crack Width - G35 & G40Anonymous D1h2pKNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Thaipei 101 - Earthquake LoadingDocumento69 pagineThaipei 101 - Earthquake LoadingAnonymous D1h2pKNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- An Interesting Article About Preliminary SizingDocumento5 pagineAn Interesting Article About Preliminary SizingAnonymous D1h2pKNessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- COT 2 Reading and Writing Q4Documento4 pagineCOT 2 Reading and Writing Q4Romy Sales Grande Jr.Nessuna valutazione finora
- Chapter 3.3 - Cashflow and Continuous Compounding Sample ProblemsDocumento14 pagineChapter 3.3 - Cashflow and Continuous Compounding Sample ProblemsArin ParkNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Kursus Literasi MaklumatDocumento5 pagineKursus Literasi MaklumatDanTanNessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- 2nd Year English Send Up 22Documento2 pagine2nd Year English Send Up 22Keats 28Nessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Cognitive Psychology - Write-Up TemplateDocumento5 pagineCognitive Psychology - Write-Up TemplateRedkraynNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Certifi Cati N: Salary DoesDocumento8 pagineCertifi Cati N: Salary DoesGeeNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- MK2 ManualDocumento55 pagineMK2 ManualJFrink333100% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- EstratehiyaDocumento2 pagineEstratehiyaMikaella AlvarezaNessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- PF Chang's Health Inspection 6-21-19Documento2 paginePF Chang's Health Inspection 6-21-19Jimmy BentleyNessuna valutazione finora
- STAT1008 Cheat SheetDocumento1 paginaSTAT1008 Cheat SheetynottripNessuna valutazione finora
- Genpact Leansixsigma Training OfferingDocumento4 pagineGenpact Leansixsigma Training OfferingSwamy NunnaNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- LatexDocumento4 pagineLatexDwi MayuNessuna valutazione finora
- The Age of EnlightenmentDocumento3 pagineThe Age of EnlightenmentIoana Botar100% (3)
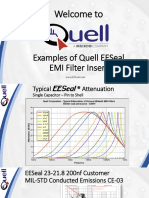
- Examples of Quell's EESeal EMI Filter Inserts - MIL-STD-461 Test ResultsDocumento15 pagineExamples of Quell's EESeal EMI Filter Inserts - MIL-STD-461 Test ResultsXto PeregrinNessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Online Web Chat Application DocumentDocumento8 pagineOnline Web Chat Application DocumentENGINEER HERENessuna valutazione finora
- DOA 19 Leaflet Framini 2p en-GB-ID High-ResDocumento2 pagineDOA 19 Leaflet Framini 2p en-GB-ID High-ResHeri SiswantoNessuna valutazione finora
- Applied Thermodynamics IIDocumento124 pagineApplied Thermodynamics IIHimanshu1712100% (2)
- Manual HDCVI DVR SeriesDocumento144 pagineManual HDCVI DVR SerieshansturNessuna valutazione finora
- Aunty Maria': Come Home For A Coffee: Teaching NoteDocumento4 pagineAunty Maria': Come Home For A Coffee: Teaching NoteAditya DesaiNessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- 36-217 Fall 2013 HW04Documento2 pagine36-217 Fall 2013 HW04Gabriel Bernard MullenNessuna valutazione finora
- Quantification of Organic Acids by HPLCDocumento5 pagineQuantification of Organic Acids by HPLCLee HaronNessuna valutazione finora
- SQL Server Stored Procedures For BeginnersDocumento13 pagineSQL Server Stored Procedures For BeginnersDaryll Joe CananNessuna valutazione finora
- Graduate Enlistment: DAF 202 - Economics & Social Aspect of DevelopmentDocumento43 pagineGraduate Enlistment: DAF 202 - Economics & Social Aspect of DevelopmentJames Ray HjPotter MendajeNessuna valutazione finora
- Public Relations vs. Propaganda: Alexandru BASTIANDocumento6 paginePublic Relations vs. Propaganda: Alexandru BASTIANFatima AshrafNessuna valutazione finora
- New Microsoft PowerpointDocumento23 pagineNew Microsoft Powerpointapi-276775036Nessuna valutazione finora
- MedigpsDocumento8 pagineMedigpsAlex HillNessuna valutazione finora
- History of AAMI BIT StoryDocumento11 pagineHistory of AAMI BIT StoryManojNessuna valutazione finora
- Atex Flow ChartDocumento1 paginaAtex Flow ChartMohammad KurdiaNessuna valutazione finora
- QSV 2 Product Release Procedure EN 01 PDFDocumento6 pagineQSV 2 Product Release Procedure EN 01 PDFprashanthNessuna valutazione finora
- Radio - Micro - Bit RuntimeDocumento16 pagineRadio - Micro - Bit RuntimeJohn WestNessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)