Potrebbero piacerti anche
- SEMAFORIZACIONDocumento22 pagineSEMAFORIZACIONAlejandra FarfánNessuna valutazione finora
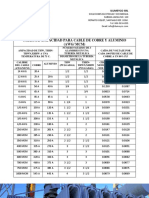
- Tabla de Ampacidad para Cable AWG o MCM PDFDocumento2 pagineTabla de Ampacidad para Cable AWG o MCM PDFCarlos Ávila GómezNessuna valutazione finora
- Curso Bombas Lineales Mecanicas Material PDFDocumento113 pagineCurso Bombas Lineales Mecanicas Material PDFRomulo Fernando Astudillo BravoNessuna valutazione finora
- Secado de ResinasDocumento8 pagineSecado de ResinasJorge Luis García EliseaNessuna valutazione finora
- Cuestionarios Concurso DocenteDocumento466 pagineCuestionarios Concurso DocenteIngrixita Garzìa100% (1)
- Ford F-100 - Ranger - Mercedes Benz Sprinter PDFDocumento2 pagineFord F-100 - Ranger - Mercedes Benz Sprinter PDFHéctor BoggioniNessuna valutazione finora
- Extraccion Liquido LiquidoDocumento58 pagineExtraccion Liquido LiquidoENrique100% (1)
- Cotización Trabajos Electricos Incluido IGVDocumento3 pagineCotización Trabajos Electricos Incluido IGVJose VilchezNessuna valutazione finora
- Estudio para La Implementacion de Un Sistema de Monitoreo Electronico de Alarmas para La Empresa TecsDocumento183 pagineEstudio para La Implementacion de Un Sistema de Monitoreo Electronico de Alarmas para La Empresa TecsOsmar Mendoza VacaNessuna valutazione finora
- Ampacidad Cables Al Aire Libre Baja Tension PDFDocumento1 paginaAmpacidad Cables Al Aire Libre Baja Tension PDFCarlos Ávila GómezNessuna valutazione finora
- Utilizacion Del Filtro de Kalman Como Estimador de La Velocidad en El Control Vectorial de Motores de InduccionDocumento124 pagineUtilizacion Del Filtro de Kalman Como Estimador de La Velocidad en El Control Vectorial de Motores de InduccionCarlos Ávila GómezNessuna valutazione finora
- Trabajo FinalDocumento10 pagineTrabajo FinalCarlos Ávila GómezNessuna valutazione finora
- Introduccion A La EstadisticaDocumento628 pagineIntroduccion A La EstadisticaCarlos Ávila Gómez100% (1)
- Ejercicios Resueltos de Cálculo - Universidad de MálagaDocumento592 pagineEjercicios Resueltos de Cálculo - Universidad de MálagaCarlos Ávila GómezNessuna valutazione finora
- PIC16CXXDocumento11 paginePIC16CXXCarlos Ávila GómezNessuna valutazione finora
- Administracion Del Mantenimiento ManualDocumento10 pagineAdministracion Del Mantenimiento Manualjesus emmanuel castillo riosNessuna valutazione finora
- Caso Práctico - Método ICAMDocumento14 pagineCaso Práctico - Método ICAMHse2Nessuna valutazione finora
- PROYECTO MANTENIMIENTO PILETAS-signed-signedDocumento7 paginePROYECTO MANTENIMIENTO PILETAS-signed-signedPatricio PalacioNessuna valutazione finora
- TIPOS DE CEMENTOS y ConcretoDocumento76 pagineTIPOS DE CEMENTOS y ConcretoAlexander Mancilla HuaytaNessuna valutazione finora
- Resumen GaserosDocumento22 pagineResumen Gaserosclaudia salasNessuna valutazione finora
- Transiciones y Curvas en Regimen SubcriticoDocumento2 pagineTransiciones y Curvas en Regimen SubcriticoJhonatan Garcia PerezNessuna valutazione finora
- Práctica 2 - Humidificación - L3Documento7 paginePráctica 2 - Humidificación - L3PINEDA CASTAÑEDA VANESSA DEL CARMENNessuna valutazione finora
- Análisis Dinámico Por Métodos NuméricosDocumento13 pagineAnálisis Dinámico Por Métodos NuméricosOscar MartinezNessuna valutazione finora
- CV Jaramillo SSTDocumento2 pagineCV Jaramillo SSTEduardo Jaramillo SilvaNessuna valutazione finora
- Capba Digital 006Documento42 pagineCapba Digital 006Martin BonivardoNessuna valutazione finora
- Poketscript TutorialDocumento35 paginePoketscript TutorialZrg Axz0% (1)
- AMP 045CD InstrDocumento24 pagineAMP 045CD Instrjogonza_oaxNessuna valutazione finora
- 38bases para TechosDocumento4 pagine38bases para TechoschrsitianNessuna valutazione finora
- Cristalizacion CuSO4 BDocumento5 pagineCristalizacion CuSO4 BJorgeMartinNessuna valutazione finora
- Manual Practico ST10 PDFDocumento47 pagineManual Practico ST10 PDFErick Mauricio Meza ParedesNessuna valutazione finora
- Muros PrefabricadosDocumento5 pagineMuros PrefabricadosRichard Teran YaltaNessuna valutazione finora
- El DecibelDocumento3 pagineEl DecibelAnthony MuñozNessuna valutazione finora
- Bambu MetradosDocumento8 pagineBambu MetradosMaJito MadalengoitiaNessuna valutazione finora
- RC461 Estudio Antenas DecodificadoresDocumento14 pagineRC461 Estudio Antenas DecodificadoresAngel OlmosNessuna valutazione finora
- Ejercicio 1 Drivers Arquitectónicos-RespDocumento9 pagineEjercicio 1 Drivers Arquitectónicos-RespAlejo MorenoNessuna valutazione finora
- Relacion de Equipo Minimo de LaboratorioDocumento3 pagineRelacion de Equipo Minimo de LaboratorioJuan CarlosNessuna valutazione finora
- Destilacion Molecular CentrifugaDocumento5 pagineDestilacion Molecular CentrifugaGema CedeñoNessuna valutazione finora