Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Anixter Single Use Pulling Eye Solution Datasheet enDocumento2 pagineAnixter Single Use Pulling Eye Solution Datasheet enjfriquelmeNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- (Engineering) - Electrical Power and Energy Systems 1999-21 - Dynamics of Diesel and Wind Turbine Generators On An Isolated PowerDocumento7 pagine(Engineering) - Electrical Power and Energy Systems 1999-21 - Dynamics of Diesel and Wind Turbine Generators On An Isolated PowerjfriquelmeNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Transients in Power SystemsDocumento219 pagineTransients in Power Systemschuppa98% (41)
- Panamericana Norte KM 15, Quilicura Santiago, CHILE. Phone: 562 640 80 00 / Fax: 562 747 13 25 Email: Info@rolec - CLDocumento3 paginePanamericana Norte KM 15, Quilicura Santiago, CHILE. Phone: 562 640 80 00 / Fax: 562 747 13 25 Email: Info@rolec - CLjfriquelmeNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Evaluation of Grounding Performance of Energized Substation by Ground Current MeasurementDocumento4 pagineEvaluation of Grounding Performance of Energized Substation by Ground Current MeasurementjfriquelmeNessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Tlp250 Application NoteDocumento7 pagineTlp250 Application NoteHeriberto Flores AmpieNessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- On CryogenicsDocumento15 pagineOn Cryogenicsaswinchand50Nessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Soft Light Dimmer-Cd00003922Documento8 pagineSoft Light Dimmer-Cd00003922Dan EsentherNessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- 160.00-m3 Vs Oil PumpDocumento16 pagine160.00-m3 Vs Oil PumpArshad Mahmood100% (2)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Buck ConverterDocumento2 pagineBuck ConverterBhadreshkumar SharmaNessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Flexible Power Electronic TransformerDocumento46 pagineFlexible Power Electronic Transformerkowkuriram100% (1)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Hfa15Pb60Pbf: FeaturesDocumento7 pagineHfa15Pb60Pbf: FeaturesImran AslamNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Power ElectronicsDocumento265 paginePower ElectronicsLudovicoNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Cosmic Ray Failures in Power Electronics: Application NoteDocumento12 pagineCosmic Ray Failures in Power Electronics: Application NoteEdsonNessuna valutazione finora
- Datasheet 1MBH 50D - 60Documento5 pagineDatasheet 1MBH 50D - 60jtec08Nessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- IPMs V Series Application Manual IGBT PDFDocumento86 pagineIPMs V Series Application Manual IGBT PDFDoDuyBacNessuna valutazione finora
- Fairchild IGBT BasicsDocumento29 pagineFairchild IGBT BasicswhcallegariNessuna valutazione finora
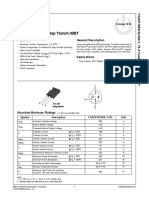
- FGH75T65SHD: 650 V, 75 A Field Stop Trench IGBTDocumento9 pagineFGH75T65SHD: 650 V, 75 A Field Stop Trench IGBTРоман АлександровичNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The Electric Warship: October 1997Documento18 pagineThe Electric Warship: October 1997Vineet KumarNessuna valutazione finora
- IXDD414Documento11 pagineIXDD414CHARIS ZEVGARASNessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Speed Control of Single Phase Induction Motor Using AC Chopper by Asymmetrical PWM TechniqueDocumento6 pagineSpeed Control of Single Phase Induction Motor Using AC Chopper by Asymmetrical PWM TechniqueGRD Journals100% (2)
- Dip Ipm App NoteDocumento43 pagineDip Ipm App Noteamateur123456Nessuna valutazione finora
- PI IGBT ProductCatalog PDFDocumento52 paginePI IGBT ProductCatalog PDFanand shekhawatNessuna valutazione finora
- Design and Validation of A High-Density 10 KV Silicon Carbide MOSFET PowerDocumento262 pagineDesign and Validation of A High-Density 10 KV Silicon Carbide MOSFET Powerar.haidari02Nessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Robert Bosch PaperDocumento7 pagineRobert Bosch PaperMahendra DoraNessuna valutazione finora
- PEQB Rev 2 PDFDocumento257 paginePEQB Rev 2 PDFVsrisai Chaitanya100% (2)
- 200 - EE8552, EE6503 Power Electronics - Question Bank 3Documento119 pagine200 - EE8552, EE6503 Power Electronics - Question Bank 3NiteshNarukaNessuna valutazione finora
- IGBT FailureDocumento13 pagineIGBT FailureSteven Leif Essel100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Unit 2 - Overview of Power ElectronicsDocumento64 pagineUnit 2 - Overview of Power ElectronicsKakumbi Shukhovu ChitiNessuna valutazione finora
- Datasheet Igbt Lef75g602Documento7 pagineDatasheet Igbt Lef75g602Nguyễn ĐứcNessuna valutazione finora
- Curso Drivers AC SiemensDocumento37 pagineCurso Drivers AC SiemensCarlos G. DuqueNessuna valutazione finora
- Electronics Communication - Engineering - Power Electronics - Introduction To Power Electronics - NotesDocumento38 pagineElectronics Communication - Engineering - Power Electronics - Introduction To Power Electronics - NoteswondwosenNessuna valutazione finora
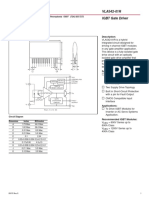
- Hybrid VLA542 01RDocumento6 pagineHybrid VLA542 01RGustavo ChaconNessuna valutazione finora
- HP 450 OptocouplerDocumento16 pagineHP 450 Optocoupler1cvbnmNessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)